
Fターム[3D246HA93]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体加減速度 (1,415)
Fターム[3D246HA93]の下位に属するFターム
Fターム[3D246HA93]に分類される特許
101 - 120 / 217
制動装置
【課題】製造コストの上昇を抑えつつ、停車維持制御時の違和感の抑制と制動力の確保とを両立できる制動装置を提供すること。
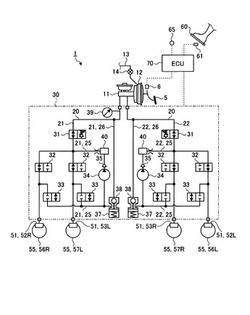
【解決手段】マスタカット弁31とポンプモータ34とを制御することによりブレーキフルードの油圧を制御可能に設けられていると共に、停車維持制御判定部79が停車維持制御を行うと判定した場合には、ポンプモータ34でブレーキフルードの油圧を増圧させると共にマスタカット弁31でマスタシリンダ11の方向へのブレーキフルードの流れを低減させることによりホイールシリンダ51に作用する油圧をホイールシリンダ51が制動力を発生可能な油圧にし、且つ、ブレーキペダル5への制動操作の操作量が少なくなった場合には、マスタカット弁31でマスタシリンダ11の方向へのブレーキフルードの流れを低減させることによりホイールシリンダ51に作用するブレーキフルードの油圧の上昇の度合いを大きくする油圧制御部78を備える。
(もっと読む)
運転操作支援装置および運転操作支援方法

【課題】ドライバに極力違和感を与えずに、回避支援することが可能な運転操作支援装置および運転操作支援方法を提供する。
【解決手段】ドライバがとる回避操作を特定するドライバ回避操作特定部106がブレーキ操作のみを特定し、且つ、回避支援をする制御方法を選択する回避制御選択部107が制動制御と操舵制御との双方の実行を選択したときには、回避制御支援量算出部108が、回避制御開始地点(時点T1)から時間経過と共に操舵制御の支援量を増加させることにより、例えば、障害物である歩行者の動きの変化の可能性が少なくなるに連れて操舵制御の支援量を漸増させる操舵介入を行い、回避制御支援の介入時におけるドライバの違和感を低減する。
(もっと読む)
運転支援装置
【課題】運転支援の機能を運転者が適切に利用することができる運転支援装置を提供すること。
【解決手段】本発明に係る車両の制御により運転者の運転を支援する運転支援装置は、運転支援制御中における運転者の操作介入に基づいて、運転支援制御を制限する運転支援制限手段と、運転支援制御の信頼度を検出する信頼度検出手段と、信頼度に応じて運転支援制限手段の作動条件を変更する作動条件変更手段と、を備えることを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】電源電圧が低下した場合においても制動制御における制動力を確保しつつ、電力使用の効率化を図ることができるブレーキ制御装置を提供する。
【解決手段】ある態様のブレーキ制御装置によれば、電源の出力電圧が閾電圧以上であれば通常の制動制御がなされ、設定された制動力およびその応答性が確保される。一方、電源の出力電圧がその閾電圧より低下すると省電力制動制御に切り替えられ、制動制御における電力消費が低減される。アキュムレータの蓄圧に際してオイルポンプのモータ駆動が開始されたときに、省電力制動制御への切替電圧である閾電圧を基準電圧V10からそれより低い調整電圧V1xに切り替え、省電力制動制御へ移行し難くしている。
(もっと読む)
走行支援装置
【課題】車両を経路誘導するための走行支援制御と、障害物を回避するための走行支援制御とを両立し、運転者にとって、より安全に、違和感を少ない走行支援装置を提供する。
【解決手段】走行支援装置は、自車が進行しようとする経路上へ誘導するための第1のラインと、障害物との接触を回避するための第2のラインを生成する生成部と、 前記第1及び第2のラインのうち、少なくとも1つのラインと前記自車の位置関係に基づいて、当該自車を制御する制御部を備える。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とする。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御する制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
制動装置
【課題】停車維持制御時の違和感を抑制できる制動装置を提供すること。
【解決手段】停車維持制御を行う場合には、油圧制御部78は、車両の運転者がブレーキペダル5の制動操作を解除しようとしていると判定できる場合に、ポンプモータ34で油圧を増圧させ、マスタカット弁31でマスタシリンダ11の方向へのブレーキフルードの流れを低減させている。これにより、ポンプモータ34で油圧を増圧させると共にマスタカット弁31でマスタシリンダ11の方向へのブレーキフルードの流れを低減させることに起因してブレーキペダル5がマスタシリンダ11の方向に吸い込まれる場合でも、この現象は車両の運転者がブレーキペダル5の制動操作を解除しようとしている場合に生じるため、運転者は気が付かない。従って、運転者が違和感を覚えることを抑制できる。この結果、停車維持制御時の違和感を抑制することができる。
(もっと読む)
前後加速度センサの出力補正方法
【課題】 上下加速度センサを必要をせずに路面傾斜の影響を排除して正しい前後加速度を検出する。
【解決手段】 前後加速度センサが出力する前後加速度Gsは、真の前後加速度Gaと、路面の傾斜による重力加速度の路面方向の成分Gos=g×sinθ(θ:路面傾斜角)とを含むが、後者は時間の関数でないために時間微分によって排除され、前後加速度Gsの微分値dGs/dtを時間積分した積分値∫(dGs/dt)dtは重力加速度gの路面方向の成分Gosを含まない正しい前後加速度Gaを示す値となる。よって、上下加速度センサを必要とせずに正しい前後加速度Gaを算出することが可能となり、部品点数を削減してコストダウンに寄与することができる。
(もっと読む)
姿勢安定化制御装置及び車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とすることである。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
運転制御装置
【課題】制動力の調整のみによって左右の駆動輪間の前後力に差を与えて車両の旋回性能を制御する場合に、制動による減速感を低減すること。
【解決手段】運転制御装置20は、走行軌跡設定部21と、制御条件判定部22と、操作感度変更部23とを備える。走行軌跡設定部21は、車両が将来走行する将来走行軌跡を設定する。制御条件判定部22は、走行軌跡設定部21が設定した将来走行軌跡から、US(アンダーステア)抑制制御の介入が予測されるか否かを判定する。操作感度変更部23は、制御条件判定部22が、US抑制制御の介入が予測されると判定した場合、アクセルペダルの操作感度を、US抑制制御の介入がない場合よりも、車両の内燃機関の出力が増加しやすくなるように変更する。
(もっと読む)
ブレーキ制御装置
【課題】電源電圧が低下した場合においても制動制御について良好な応答性を維持できるブレーキ制御装置を提供する。
【解決手段】ある態様のブレーキ制御装置は、バッテリからの電力供給を受けて駆動し、その動力によりアキュムレータへ作動液を供給して蓄圧を実行するオイルポンプと、バッテリの出力電圧を検出する電圧検出センサと、アキュムレータ圧Paccを検出するアキュムレータ圧センサと、アキュムレータ圧Paccが蓄圧開始液圧以下となったときに、オイルポンプの駆動を開始してアキュムレータへの蓄圧を開始する一方、アキュムレータ圧Paccが蓄圧開始液圧よりも高い蓄圧終了液圧以上となったときに、オイルポンプの駆動を停止してアキュムレータへの蓄圧を終了し、バッテリの出力電圧が許容基準値Vref以下となったときには蓄圧終了液圧を所定量嵩上げ設定するブレーキECUと、を備える。
(もっと読む)
危険車両判定装置および運転支援システム
【課題】より少ない情報のみを用いて車両の状況に応じて危険を特定することのできる危険車両判定装置およびそれを用いた運転支援システムを提供する。
【解決手段】危険車両判定装置は、それぞれが異なる指向性を有する複数のアンテナと、自車両および周囲の車両の加速度を取得する加速度取得手段と、周囲の車両から送信される電波の前記複数のアンテナの各々における受信電力を取得する受信電力取得手段と、各アンテナにおける受信電力を、各アンテナにあらかじめ定められた重み付け係数を用いて平均する平均受信電力算出手段と、算出した平均受信電力が上位の所定数の車両について、自車両と当該車両との相対加速度が所定の閾値以上である場合に、当該車両を危険車両であると判断する危険判定手段と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】電源電圧が低下しても必要な制動力を確保しやすいブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、電源と、運転者の操作に連動して作動液圧が変動する液圧源と、液圧源から作動液の供給を受けて車輪に制動力を付与するホイールシリンダと、液圧源とホイールシリンダとの間に設けられ、液圧源側がホイールシリンダ側よりも高圧であるときの差圧の作用により機械的に開弁され得る制御弁と、制御弁の開閉を制御電流により制御する制御部と、を備える。制御弁は、通常の制動時には、差圧の作用により機械的に開弁されることのないよう設定された規定の制御電流により閉弁される常開型の弁であってもよい。制御部は、電源が低電圧状態にあるか否かを判定し、低電圧状態と判定した場合には規定の制御電流よりも小さい制御電流で制御弁を閉弁してもよい。
(もっと読む)
車線変更支援装置
【課題】車線変更の安全性をより正確に判断して所定の安全制御を行なうことが可能な車線変更支援装置を提供すること。
【解決手段】自車両が行なう車線変更を検知するための車線変更検知手段と、前記自車両の車線変更先の車線を前記自車両の後方側から接近する接近車両における、前記自車両から見た相対加速度を検出するための相対加速度検出手段と、前記自車両の速度を検出する速度検出手段と、前記速度検出手段により検出された速度に基づく自車両の限界駆動力を算出し、該算出した限界駆動力を車重で除して算出される限界加速度と、前記相対加速度検出手段による検出結果に基づく相対加速度と、の差が閾値以下である場合に所定の安全制御を行なう制御手段と、を備える車線変更支援装置。
(もっと読む)
電気自動車の回生制御装置
【課題】電気自動車の回生制御装置に関し、繰り返し制動時におけるエネルギ回収効率を高めつつ、摩擦制動装置の耐フェード性能を確保する。
【解決手段】制動時における減速度を検出する減速度検出手段1と、制動時における車速を検出する車速検出手段5と、該減速度が予め設定された第一減速度以上であり、かつ、該車速が予め設定された第一車速以上である場合に、計時を開始する計時手段3aと、該減速度及び該計時の経過時間に基づいて、電動機14の回生トルク量を増大させる回生トルク量増大制御を実施する回生量制御手段3bと、を備える。
(もっと読む)
車両走行支援装置
【課題】走行中の障害物を回避する際に、十分な安全性を確保すると共に、適切な走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】物体領域設定部17が、障害物検出部12及び二輪車判定部13により障害物として二輪車が検出された場合に、障害物の高さに基づいて物体領域Aを設定する。障害物が二輪車の場合は、転倒することによって必要とされる物体領域Aが増大する可能性があるが、障害物の高さに基づいて物体領域Aを設定することによって、転倒の可能性も考慮して安全性を確保することができる。また、障害物の高さに基づいて、転倒の可能性も考慮した必要最低限度の物体領域Aを設定することができるため、必要以上に広い物体領域Aを確保することを防止することができる。
(もっと読む)
制動制御装置
【課題】液圧制御性能を低下させることなく、比例電磁弁の駆動周波数で発生する作動音の低減を行うことが可能な制動制御装置を提供する。
【解決手段】設定された駆動周波数により駆動される比例電磁弁の開度に応じて液圧を調圧し、当該調圧した液圧に基づき制動力を制御する制動制御装置1は、要求される制動力に応じて液圧を調圧する際に要求される調圧精度に基づいて要求調圧精度指数を設定する要求調圧精度指数設定手段と、比例電磁弁を駆動する駆動周波数に起因する作動音の低減要求に基づいて要求作動音低減指数を設定する要求作動音低減指数設定手段と、設定された要求調圧精度指数及び要求作動音低減指数に基づいて比例電磁弁の駆動周波数を設定する駆動周波数設定手段14と、を備える。
(もっと読む)
車両の運動制御装置
【課題】操舵操作に基づいて急激なヨーイング挙動の発生を予測し、必要な場合に限って、車両安定性制御における制動液圧の応答性を向上させることができる車両の運動制御装置を提供する。
【解決手段】車両のオーバステアを抑制する車両安定性制御を実行する車両運動制御装置において、操舵角に基づいて急激な車両のヨーイング挙動を予測し、適切な車輪に備えられた制動手段に対する制御開始しきい値を調整する。操舵角センサによって操舵角を検出し、検出された操舵角に基づいて操舵角速度を演算する。操舵角が増加するときに操舵の切り返し状態を判定し、切り返し操舵状態のときの操舵角速度が大きい場合に、制動手段に対する制御開始しきい値が小さくなるように調整する。
(もっと読む)
移動体の運動制御用センサシステムおよび運動制御システム
【課題】移動体のコーナーリング時の走行安定性制御に適切な移動体の運動制御用センサシステムおよび運動制御システムを提供する。
【解決手段】移動体のばね下に物理量センサを設置することで、ばね下における物理量をばねを介さず検出できるようにした。移動体のばね下に働く加速度を検出する加速度センサ(加速度センサヘッド131)は、検出軸が移動体の操作軸(転舵軸S)に交わるように設置することで、操作軸周りの角加速度による加速度が検出されないようにした。
(もっと読む)
液圧ブレーキユニットと液圧ブレーキユニットの制御方法
【課題】迅速かつ容易に失陥有無を判断し、液圧媒体の漏れによる枯渇を抑制する液圧ブレーキユニットと液圧ブレーキユニットの制御方法とする。
【解決手段】リザーバから供給された液圧媒体を加圧し、ブレーキ操作量に応じた液圧を生成するマニュアル液圧供給部と、マニュアル液圧供給部と第一のホイールシリンダとの間を連通する第一液圧系統と、マニュアル液圧供給部と第二のホイールシリンダとの間を連通する第二液圧系統と、第一液圧系統と第二液圧系統との間を連通する主流路に設けられた分離弁と、分離弁を開閉制御する分離弁制御部と、リザーバに貯留された液圧媒体が所定量より少ないか否かを検出する液圧媒体量検出部と、を有するブレーキECUとを備える液圧ブレーキユニットであって、分離弁制御部は、液圧媒体量検出部が、液圧媒体が所定量より少ないことを検出した場合に、分離弁を閉状態とする液圧ブレーキユニットとする。
(もっと読む)
101 - 120 / 217
[ Back to top ]