
Fターム[3D246HA93]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体加減速度 (1,415)
Fターム[3D246HA93]の下位に属するFターム
Fターム[3D246HA93]に分類される特許
41 - 60 / 217
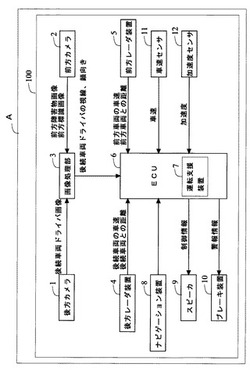
運転支援装置、運転支援方法、及び運転支援システム
【課題】後続車両の運転者が脇見運転している場合において、車両同士の衝突を抑制する技術を提供する。
【解決手段】車両内に設けられ、該車両の運転支援を行う運転支援装置であって、前記車両の前方車両又は前記車両の後続車両との衝突が予測される場合に前記車両の速度を自動制御する速度自動制御部と、前記後続車両の運転者の向きに関する情報を取得する情報取得部と、前記情報取得部で取得された前記後続車両の運転者の向きに関する情報から、前記後続車両の運転者がよそ見をしているか否かを判断するよそ見判断部と、前記よそ見判断部が前記後続車両の運転者がよそ見をしていると判断した場合、前記後続車両からの追突を抑制するよう、前記自動制御の制御内容を変更する制御内容変更部と、を備える。
(もっと読む)
車両用液圧制動装置

【課題】ハイドロブースター機能とABSなどの制動力制御機能を有する車両用液圧制動装置において、電子制御による制動力制御中に動力駆動のポンプからの供給液圧でマスタシリンダ圧が高圧になる現象を、通常ブレーキ特性に悪影響を及ぼさずに回避できるようにすることを課題としている。
【解決手段】マスタシリンダ1、高液圧源2、ブレーキアシスト機構3、貯液室4、電子制御装置6、液圧制御装置7を有し、ブレーキアシスト機構3に助勢された力でマスタシリンダ1が作動してマスタ液圧室の液圧に応じた制動力を車両の車輪に付与する車両用液圧制動装置に、駆動圧減圧弁9を備えさせ、マスタ圧入力ポート9bの液圧が駆動圧入力ポート9cの液圧よりも所定値以上高いときにそれらのポートの液圧差で駆動圧減圧弁9が作動して駆動液圧室3bから貯液室4に至る液圧排出経路を開放するようにした。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両用制動装置
【課題】失陥時のブレーキ操作部材の無効ストロークを低減可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36が移動可能に設けられており、セカンダリピストン33との間にプライマリ室PCが形成されている。プライマリ室PCは、ABSアクチュエータ5を介してホイルシリンダWC2,WC3に接続されている。プライマリピストン36の後方には、パワー液圧源7からの駆動液圧が入力可能な駆動室DCが形成されている。プライマリ室PCは吸収リザーバ91の貯留室913に接続され、駆動室DCは吸収リザーバ91の背圧室914に接続されている。プライマリ室PCと貯留室913との間には、常閉型のカット弁92が形成されている。液圧ブレーキを開始する場合、ブレーキペダル22の操作量に応じて、パワー液圧源7により駆動液圧を発生させ、駆動室DCと背圧室914とに供給する。
(もっと読む)
速度制御装置
【課題】移動体の速度制御を行う際に、移動体の運転者に違和感や恐怖感を抱かせることを抑制すること。
【解決手段】車両の運転者の注視点を定めるとともに、車両の周囲環境の運動を運転者の網膜球面を模擬した座標系に投影し、その投影した運動における、注視点から周囲に放射状に拡がる発散成分を算出する。さらに、注視点を含む所定のエリア内における、発散成分の総量を、車両の運転者が感じる速度感を示す指標として求める。そして、求めた発散成分の総量が一定となるように、車両の走行速度を制御する。
(もっと読む)
車両の制動制御装置
【課題】ポンプの駆動態様の変更に起因した駆動音の大きさの変動によって車両の搭乗者に不快感を与えることを抑制できると共に、ポンプの駆動態様をホイールシリンダからリザーバ内に流入するブレーキ液の液量に応じた駆動様態に設定できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において車両が走行している路面が高μ路から低μ路に変わっていない場合、偏差補正量Qreq_Aveと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように偏差ポンプ駆動制御を実行する。一方、ECUは、車両が走行している路面が高μ路から低μ路に変わった場合、緊急補正量Qreq_Skidと基準吐出量Qreq_baseとを加算することにより設定された目標吐出量Qreqのブレーキ液がポンプから吐出されるように緊急ポンプ駆動制御を実行する。
(もっと読む)
車両制御装置
【課題】先行車と自車との相対的な制動応答特性の差異に関わらず、追従走行制御時に適切に自車を減速させることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて自車1の走行状態を制御する通信追従走行制御ECU40と、先行車100の減速ジャーク情報を取得する先行車走行情報取得部45と、通信追従走行制御ECU40が先行車100の減速に応じて自車1を減速させるタイミングを先行車100の減速ジャーク情報に基づいて変化させる減速度算出部33と、を備える。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品
【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
車両用ブレーキ制御装置
【課題】摩擦制動力と回生制動力とを併用した回生協調ブレーキ制御を行うとともにABS制御を実行する車両用ブレーキ制御装置において、ABS制御実行中においてABS制御に悪影響を与えることなくエネルギー効率を高めることができるものの提供。
【解決手段】この車両用ブレーキ装置は、前輪側の制動力を、摩擦制動力である液圧制動力(前輪側VB液圧分Fvbf+リニア弁差圧分Fval)と、回生制動力Fregとにより制御し、後輪側の制動力を、液圧制動力(後輪側VB液圧分Fvbr)のみにより制御することで回生協調ブレーキ制御を実行する。そして、この装置は、ABS制御実行中において、限界回生制動力Freglimitを、回生制動対象車輪である前2輪に働いた場合に前2輪にロックが発生しない範囲内の制動力の最大値に設定し、回生制動力Fregを同限界回生制動力Freglimitを超えないように調整する。
(もっと読む)
車両用制動支援装置及び車両用制動支援方法
【課題】自車両前方の障害物XMに対する運転者の支援を、運転者の意図に応じてより適切に実施することを目的とする。
【解決手段】自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、予め設定した第1の閾値Th1より高く且つアクセルペダル22が操作されていないと判定すると、自車両MMに制動力を付与する。さらに、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第1の閾値Th1よりもリスクポテンシャルが高い第2の閾値Th2よりリスクポテンシャルが高いと判定すると、アクセルペダル22の操作状態に関わらず自車両MMに制動力を付与する。
(もっと読む)
車両制御装置
【課題】先々行車両の存在の検出精度を向上することが可能な車両制御装置を提供する。
【解決手段】本発明の一実施形態に係る車両制御装置1は、反射体を利用してレーダ20によって先々行車両を認識し、当該レーダ20によって認識された先々行車両に基づいて自車両の走行制御を行う車両制御装置において、道路以外の反射体を認識する反射体認識手段42と、レーダ20によって先々行車両が認識されない場合であっても、反射体認識手段42によって道路以外の反射体が認識されない場合には、先々行車両がいるかもしれないと推定する先々行車両推定手段43と、レーダ20によって先々行車両が認識されない場合であっても、先々行車両推定手段43によって先々行車両がいるかもしれないと推定された場合には、自車両の走行制御を行う走行制御手段44とを備える。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作量又はマスタシリンダ内の流体圧を検出するためのセンサを用いなくても、車両のエンジンを自動的に停止させるタイミングを設定することができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両に設けられた加速度センサからの検出信号に基づき車体加速度Gを演算する。そして、ブレーキ用ECUは、車両の停車前に演算した車体加速度Gの絶対値が、車両で発生するクリープトルクに相当する加速度として設定されたクリープ加速度Acの絶対値よりも大きい場合に、エンジンの停止を許可する停止制御を行う(第2のタイミングt12)。
(もっと読む)
車両制御装置及び車両制御方法
【課題】自車両周囲の障害物に対する運転者の運転支援をより適切に実施可能な車両制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物側への自車両の移動抑制を支援する運転支援制御を行う。この際に、運転者が自車両の運転を開始したと判定してから予め設定した抑制時間の間、上記運転支援制御を抑制する。
(もっと読む)
車両の制御装置
【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
ABSアクチュエータのハーネス配置構造
【課題】ハーネスの長さを短縮してその配索性の向上とばたつきを抑えてクランプの数を削減することができるABSアクチュエータのハーネス配置構造を提供すること。
【解決手段】車両に搭載されるABSアクチュエータ10を車体フレームに取り付けるためのABSアクチュエータ取付ブラケット1の後壁4と前記ABSアクチュエータ10との間にABSアクチュエータ用コネクタ23を配設するとともに、ABSアクチュエータ取付ブラケット1の前記後壁4の上端に後方に屈曲する屈曲部4Aを形成し、該屈曲部4Aに、コネクタ13が一体化された加速度センサ11を取り付け、該加速度センサ11のコネクタ13と前記ABSアクチュエータ用コネクタ23に車両中央側からハーネス25,24をそれぞれ接続するよう構成する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置において、回生協調制御実行中に、マスタシリンダ内のブレーキ液圧の急激な変動を抑制して、減速度の急変を抑制し、運転者に与える違和感を小さくする。
【解決手段】入力ピストン32に連結されたブレーキペダルの操作に応じて、コントローラCによって電動モータ40を作動させ、入力ピストン32及びプライマリピストン10の位置に基づき、マスタシリンダ2内のブレーキ液圧を制御する。回生協調制御実行中に、プライマリピストン10の後退位置を制限してリザーバポート20が開かないようにする。これにより、回生制動の増大に伴うプライマリピストン10の後退により、リザーバポート20が開いてマスタシリンダ2内のブレーキ液圧が急激に変動するのを防止することができ、減速度の急変を抑制し、運転者に与える違和感を小さくすることができる。
(もっと読む)
41 - 60 / 217
[ Back to top ]