
Fターム[3D246HA93]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体加減速度 (1,415)
Fターム[3D246HA93]の下位に属するFターム
Fターム[3D246HA93]に分類される特許
21 - 40 / 217
弁停止機構付き内燃機関を備える車両の制御装置
【課題】弁停止機構付き内燃機関を備える車両の制御装置に関し、車両の減速度を良好に維持しながら、過充電の防止による電池の保護と弁停止制御による触媒の劣化抑制とを両立させる。
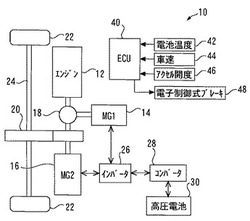
【解決手段】吸排気弁を閉弁停止状態とするための弁停止機構と、エンジン12を回転駆動可能なMG1と、減速時に車両の運動エネルギーを回生する回生機能を有するMG2と、MG2を利用した回生電力の供給を受ける高圧電池30と、を備える。減速時に弁停止制御を伴うフューエルカットが実行される場合において、弁停止制御の実行に伴う車両の減速度の低下分を補うために、MG2を利用して回生電力量を増加させる。また、当該フューエルカットが実行される場合において、高圧電池30の充電許容量が所定値よりも少ない場合に、MG2を利用して減速時に得られる回生電力を利用して、エンジン12の回転数が上昇するようにMG1を駆動する。
(もっと読む)
車両用運転支援装置

【課題】特別なセンサを装備することなく、自動ブレーキが作動した際の自車両の停止前後に発生するピッチング振動を抑制し、良好な乗り心地性を得ることができるようにする。
【解決手段】始動ブレーキ作動後の減速度Gwに基づいて減圧開始距離Pdを求め(S9)、自車両と前方障害物との間の障害物間距離Lが、前方障害物に対する停止目標距離Lsに減圧開始距離Pdを加算した距離に達したとき、ブレーキ圧の減圧を開始し(S11)、自車両の停止前後で発生するピッチング振動を抑制する。そして、障害物間距離Lが停止目標距離Lsの手前の停止ブレーキ開始距離pに達したとき、ブレーキ圧を加圧させて(S13)、自車両を停止させる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】ドライバーにとって違和感のない運転支援を実行可能な運転支援装置及び運転支援方法を提供する。
【解決手段】自車両V0周囲の状況に応じて支援量決定部14が決定した運転支援量により自車両V0のドライバーの運転支援を行い、運転支援量を決定した後にドライバーによる操舵があったときは、支援量変化量算定部17及び支援実現部18は、運転支援量を決定した後のドライバーによる操舵量に応じた補正量により補正された運転支援量によりドライバーの運転支援を行う。このため、ドライバーにとって違和感のない運転支援が実行される。
(もっと読む)
車両制御装置
【課題】より多い頻度でホイールベースの値を取得して、より的確な車両制御が行えるようにする。
【解決手段】車両安定化制御において車両諸元としてホイールベースLを使用する場合に、ホイールベースLが変更されている場合にも対応できるようにホイールベースLの値を推定演算する。そして、少なくとも車両旋回中の車速もしくは車輪速度と、操舵角StrあるいはヨーレートYrのいずれかに基づいてホイールベースLの推定演算を行うようにすることで、より多い頻度でホイールベースLの値を取得する。また、このように推定演算したホイールベースLに基づいて、車両安定化制御を行う。これにより、ホイールベースLが変更されたとしても、的確なホイールベースLに基づいて的確な車両安定化制御を行うことが可能となる。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うこと。
【解決手段】車速を取得する車速取得手段と、車体の上下挙動を取得する上下挙動取得手
段と、前記上下挙動取得手段が取得した車体の上下挙動の最大値を取得する上下挙動最大
値取得手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記車速取
得手段が取得した車速とに基づいて、制動力の上限を示す上限指令値を設定する上限指令
値設定手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記上限指
令値設定手段が設定した前記上限指令値とに基づいて、制動力の指令値を設定する制動力
指令値設定手段と、前記制動力指令値設定手段が設定した制動力の指令値に基づいて、車
輪に対する制動力を付与する制動手段とを備える。
(もっと読む)
フェード判定装置及び制動装置
【課題】適正にブレーキ装置のフェード状態を判定することができるフェード判定装置及び制動装置を提供することを目的とする。
【解決手段】フェード判定装置7は、車両1の減速度と車両1の車輪2のスリップ量とに基づいて、車輪2を制動するブレーキ装置11のフェード状態を判定することを特徴とする。制動装置6は、車両1の車輪2に生じる制動力を調節可能なブレーキ装置11と、制動力を制御して車輪2のスリップ状態を制御する制御装置7とを備え、制御装置7は、車両1の減速度と車輪2のスリップ量とに基づいて、ブレーキ装置11のフェード状態を判定し、フェード状態に応じて制動力の増減量を調節することを特徴とする。したがって、適正にブレーキ装置11のフェード状態を判定することができる、という効果を奏する。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
運転支援装置
【課題】位置制御フィードバックが不要な自動ブレーキにより安価に高い距離精度で自車両を障害物の手前に停止する。
【解決手段】演算処理部4により、自動ブレーキの開始指令のタイミングから自車両1に実際に自動ブレーキのブレーキ力が付与されるまでの実効遅れ時間を設定し、自動ブレーキで自車両1の減速度が目標減速度に対応して実際に到達する実効減速度に到達するまでの過渡時間を算出し、前記実効減速度の減速で自車両1が停車するまでの減速停止時間を算出する。さらに、それらの時間を含む制動時間に自車両の停止位置を障害物の所定距離手前の位置に設定する前出し時間を加えた時間を自動ブレーキの所要時間として算出し、衝突予測時間が所要時間になる自動ブレーキの開始指令タイミングから自動ブレーキを開始し、障害物より前記前出し時間に基づく障害物の所定距離手前の位置に自車両1を自動停止する。
(もっと読む)
車両の走行制御装置
【課題】交差点無停止走行制御による後続車両との車間距離の短縮を抑制し、適正な車間距離を維持できるようにする。
【解決手段】後続車両の情報を取得し、後続車両があると判定されたときは、自車両を交差点無停止走行制御において要求される減速度G1で減速走行した場合に、後続車両が適正な車間距離を維持するのに必要な減速度Gr1を算出し、減速度Gr1が急減速となる設定減速度G0以上である場合は、交差点無停止走行制御を回避して元の目標車速V0で走行制御し、減速度Gr1が設定減速度G0未満のときに、目標車速V2として減速度G1で減速する交差点無停止走行制御を実行する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
リターダの制御装置、車両およびリターダ制御方法、並びにプログラム
【課題】走行条件に係らず補助ブレーキとしての機能を充分に発揮させ、ECUの共通化を図ること。
【解決手段】リターダの動作中に生じる自車両の減速度を計算する補助ブレーキ力計算部71および減速度計算部72を有し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも小さいときには、所定の閾値を、放熱手段(ドラム)の回転速度の変化に対応させて可変的に設定し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも大きいときには、所定の閾値を、一定値に設定し、温度検出手段によって検出された放熱手段(ドラム)の温度が、回転速度検出手段によって検出された放熱手段(ドラム)の回転速度に対応する所定の閾値を超える温度であるときに、電気エネルギの発生を低減させる制御を行うリターダの制御装置を構成する。
(もっと読む)
制動力制御装置
【課題】車輪の制動能力を適切に発揮させることができる制動力制御装置を提供すること。
【解決手段】車両の各車輪の制動力を制御可能であり、左右一対の車輪のうちスリップ量が相対的に大きい車輪(S1肯定)である第一車輪の制動力の増加を抑制し(S3)、かつスリップ量が相対的に小さい車輪である第二車輪の制動力を増加させる。第一車輪に対する路面の摩擦係数がピークに達する前でかつ当該ピークの近傍である(S2肯定)ときに第一車輪の制動力の増加を抑制するようにしてもよい。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
省燃費運転システム
【課題】車両における省燃費運転の精度を向上すること。
【解決手段】車両の位置情報を取得する位置情報取得部11と、車両の制動装置が作動していることを判定する制動判定部12と、車両の制動装置が過去に作動した制動履歴が位置情報とともに記憶されているデータベース21と、データベース21に記憶された制動履歴に基づいて車両のエンジンへの燃料の供給量を制限する燃料制限部17と、を備える。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
発進支援装置
【課題】電動車両における発進時の不安感を容易に解消することを可能にする。
【解決手段】電動車両の運転者の操作に応じてモータで発生させる要求駆動力を算出する要求駆動力算出部15と、電動車両を発進させるためにモータで発生させる必要がある発進可能駆動力を算出する発進可能駆動力算出部14とを備え、要求駆動力算出部15で算出した要求駆動力と発進可能駆動力算出部14で算出した発進可能駆動力とをもとに、当該要求駆動力と当該発進可能駆動力との乖離の度合いを提示する。
(もっと読む)
車両の制駆動力制御装置
【課題】駆動輪の制駆動力を制御して車両を適切に走行させるとともに車体に発生する複数の挙動を同時に制御する車両の制駆動力制御装置を提供すること。
【解決手段】電子制御ユニットにおいては、入力部41がセンサ31,32,33から各検出値を入力し、車体挙動制御指令値演算部42が目標前後駆動力FX、目標ロールモーメントMx、目標ピッチモーメントMyおよび目標ヨーモーメントMzを演算する。そして、駆動力配分演算部43は駆動力FX、モーメントMx,My,Mzを同時に実現するように配分して各輪に発生させる左前駆動力Ffl、右前駆動力Ffr、左後駆動力Frlおよび右後駆動力Frrを演算する。さらに、各輪モータトルク指令値演算部44は演算部43によって演算された駆動力Ffl,Ffr, Frl,Frrに対応して各インホイールモータ19〜22が発生すべきモータトルクTfl,Tfr,Trl,Trrを演算する。
(もっと読む)
車両の制御装置
【課題】回生制動中にショックの発生を抑制する車両の制御装置を提供する。
【解決手段】制動時に、モータジェネレータによって発生する回生制動力とホイールブレーキによって発生する摩擦制動力との少なくとも一つによって車両を制動させる車両の制御装置である。統合コントローラは、回生制動中に回生トルクおよび摩擦制動トルクを算出し、回生制動中に変速機で変速を行っている場合に、回生トルクに基づいて変速機出力トルクを算出し、摩擦制動トルクがゼロではない場合に、トルクフェーズ中の前記変速機出力トルクの変動を相殺する摩擦制動トルク補正値を算出し、摩擦制動トルク補正値に基づいて、ホイールブレーキで摩擦制動力を発生させる。
(もっと読む)
21 - 40 / 217
[ Back to top ]