
Fターム[3D246HA93]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体加減速度 (1,415)
Fターム[3D246HA93]の下位に属するFターム
Fターム[3D246HA93]に分類される特許
161 - 180 / 217
運転者援助システム
【課題】運転者援助システムにおいて、自発的制動の早すぎる終了を防止する。
【解決手段】先行車両検出装置(14,28)が信号を発生し、かつ先行車両(16)を検出しないか否かを検査し、否の場合、走行速度(vF)が最後に検出された先行車両速度(vVf)より小さい時、自発的制動を終了する、段階を持つ方法を実施するように電気制御装置(24)が構成されている。
(もっと読む)
緊急退避システム、緊急退避方法

【課題】運転者の意識レベルが低下した場合に車両を路肩等に退避させる緊急退避システムにおいて、緊急状態であることを外部から認識可能な緊急退避システム等を提供すること。
【解決手段】運転者の意識レベルの低下を検出して自車両を退避させる緊急退避システム100であって、運転者の状態を検出する運転者状態検出センサ21と、運転者の状態に基づき意識レベルが所定値以下に低下したか否かを判定する意識レベル判定手段41と、意識レベルが所定以下に低下したと判定された場合、自車両の前方の所定距離内に交差点があるか否かを判定する交差点有無判定手段42と、前方の所定距離内に交差点がある場合、交差点が通行可能な否かを判定する通行可否判定手段43と、交差点が通行可能な場合、交差点内に目標停止位置を決定する目標停止位置決定手段44と、目標停止位置に自車両を停止させる制動力制御手段44、45、32と、を有することを特徴とする。
(もっと読む)
車両の統合制御システム
【課題】フェイルセーフ性を向上させるとともに、車両制御機能の追加に容易に対応可能な、車両の統合制御システムを提供する。
【解決手段】統合制御システムは、運転者の操作に基づいて、駆動系を制御する主制御系(アクセル)と、制動系を制御する主制御系(ブレーキ)と、操舵系を制御する主制御系(ステア)と、車両の周囲の環境情報または運転者に関する情報に基づいて、各主制御系において用いられる情報を作成して出力するアドバイザユニットと、予め定められた挙動を車両に実現させるために各主制御系において用いられる情報を作成して出力するエージェントユニットと、現在の車両の動的状態に基づいて、各主制御系において用いられる情報を作成して出力するサポータユニットとを含む。
(もっと読む)
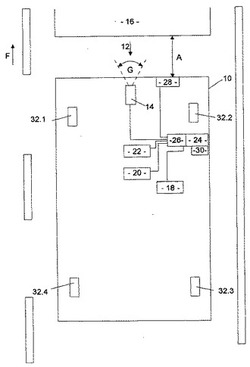
自動車の走行装置のための調整方法、自動車のための調整システムおよび自動車
【課題】アンチロックシステムの機能性を改善し、特殊な走行状況での走行安全性を向上する。
【解決手段】自動車の上部構造の緩衝性および減衰性を調整するために、自動車の緩衝状態に関するセンサデータ11が求められ、かつアンチロックシステムが、自動車のホイールのスリップに基づいて自動車のブレーキシステム2内の圧力を調整するための制御信号13を提供する、自動車の走行装置のための調整方法に関するものであり、サスペンションシステム1において、減衰器8を調整するためのモジュール6が設けられており、ブレーキシステム2において、アンチロックシステムが設けられており、該アンチロックシステムが調整モジュール7を備え、該調整モジュール7は、ブレーキ圧を調整するために、センサデータ11および/または該センサデータ11から求められる信号12を供給される。
(もっと読む)
ブレーキ装置
【課題】ストロークセンサの出力を利用してブレーキ制御を行う場合において、ストロークセンサ特性の影響を低減して良好なブレーキ制御性を実現する。
【解決手段】ブレーキ装置は、各々が計測値を並列的に出力する複数の出力系統を有するストロークセンサと、該ストロークセンサからの出力を利用してストローク量を演算するストローク演算部と、を備える。ストローク演算部は、各出力系統から互いに異なる計測値が出力された場合に、計測値の変化速度の大きさがより小さい出力系統からの出力を重視してストローク量を演算する。
(もっと読む)
車両走行制御装置
【課題】制動力増量制御開始時の制動力増量制御による違和感を軽減させること。
【解決手段】エンジン100の駆動力を車両の目標駆動力に基づいて制御するエンジンECU9と、ブレーキ装置200における各車輪の制動力を車両の目標制動力に基づいて制御するブレーキECU10と、自動走行制御時におけるエンジン100の目標駆動力とブレーキ装置200の目標制動力の設定を夫々行う駆動力設定部83と制動力設定部84を有し、エンジン100の目標駆動力の情報をエンジンECU9へと出力するとともにブレーキ装置200の目標制動力の情報をブレーキECU10へと出力する自動走行制御ECU8と、を備え、自動走行制御時に車両に働く総車両前後方向作用力を演算する総車両前後方向作用力算出部85を自動走行制御ECU8に設け、制動力設定部84は、総車両前後方向作用力が大きいほど制動力増量制御開始時の車両の目標制動力を大きく設定する。
(もっと読む)
車両の走行制御装置
【課題】運転者のシフトレバーの操作間違いやペダルの踏み間違いにより車両の安全走行状態が損なわれないように車両を制御すると共に、運転操作の誤りを違和感なく確実に運転者に理解させる。
【解決手段】車両の走行制御装置10は、車両の速度を検出する速度検出部2と、車両の加速度を検出する加速度検出部3と、車両の速度に応じて設定された上限加速度以内に、車両の加速度を制限する加速度制限部1と、を備える。
(もっと読む)
運転動力学の調整用装置
【解決手段】 電子レギュレータユニット(2)およびバルブブロック(10)を備えた車両の運転動力学の調整用装置(1)であって、この電子レギュレータユニット(2)は、バルブブロック(10)を車台(4)に取付けるための支持基盤として構築される。 (もっと読む)
制動力制御装置
【課題】 ドライバの操作に合致した制御動作を実現できる制動力制御装置を提供する。
【解決手段】 登坂路での車両停車によりブレーキ操作に応じた制動力を保持し、この制動力保持中に車両のずり下がりが生じたとき、制動力をより増加して保持する制動力加圧保持を行うブレーキECU32を備えた制動力制御装置において、ブレーキECU32は、制動力加圧保持中にドライバのアクセル操作が検出された場合、制動力保持を解除する。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
車両の走行制御装置
【課題】走行ルールに違反した原因を調査可能な車両の走行制御装置を提供する。
【解決手段】車両に搭載され、当該車両の走行を制御する走行制御装置10であって、車両の周辺の走行ルールにしたがって車両の走行を制御する走行制御部35と、車両による走行ルールの違反を判定する違反判定部37と、違反判定部により走行ルールの違反が判定された場合に、走行制御部の制御内容を記憶する記憶処理部38と、を備える。
(もっと読む)
制動制御装置
【課題】 左右輪または前後輪の制動力差が付与されている状態でドライバが制動操作量を減少させたとき、低圧側ホイルシリンダの液圧上昇を抑制することができる制動制御装置を提供する。
【解決手段】 左右輪に制動力差が付与されている状態でドライバの制動操作量が減少した場合、左右輪の制動力差が所定値以下となるまでの間、左右のホイルシリンダのうち低圧側ホイルシリンダのブレーキ液圧を保持しつつ高圧側ホイルシリンダのブレーキ液圧のみを低下させる制御指令をソレノイドインバルブ4に出力し、制動力差が所定値以下となったとき、両ホイルシリンダのブレーキ液圧を共に低下させる制御指令をソレノイドインバルブ4に出力する。
(もっと読む)
車載制御装置
【課題】車載装置の記録媒体に記録されたホイールベースの記録値が、搭載されている車両のホイールベースと大きく異なってしまうという事態にも対処可能な車載制御装置を提供する。
【解決手段】ホイールベースの記録値に基づいた車両の各種ABS制御(261、262)を行う車載制御装置が、自車両のホイールベースの計測値を取得し(20)、取得した計測値が、当該記録値を含む第1の範囲に含まれないことに基づいて、第1のABS制御(261)についての異常対策処理を行う(24)。また、取得した計測値が、当該記録値を含む第2の範囲に含まれないことに基づいて、第2のABS制御(262)についての異常対策処理を行う(25)。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】運転手によってブレーキ操作手段が操作される可能性が低いタイミングで下流側ブレーキ液路内の上流側ブレーキ液路に対する負圧を解消するための連通制御を実行することにより、ブレーキ操作手段の操作時に該操作に対する違和感を運転手に与える可能性を低減できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、ブレーキスイッチが「オン」から「オフ」に切り替ってから(ステップS11が肯定判定)の第1経過時間T1がオフ後経過時間閾値KT1以上になった場合(ステップS14が肯定判定)には、運転手によるブレーキレバー及びブレーキペダルの操作が完全に解消されたと判断する。そして、ECUは、各制動機構に設けられた各開閉弁がそれぞれ開閉駆動する連通制御を実行する(ステップS15)。
(もっと読む)
自動二輪車両の制動制御装置、及び自動二輪車両の制動制御方法
【課題】各車輪のうち一方の車輪にのみアンチロックブレーキ制御が実行された場合に該一方の車輪への制動力の付与が不能な制動機構の下流側ブレーキ液路内に発生した上流側ブレーキ液路に対する負圧を解消できる自動二輪車両の制動制御装置、及び自動二輪車両の制動制御方法を提供する。
【解決手段】ECUは、前輪ABS制御のみが実行された場合には第1実行回数FKをインクリメントする一方、後輪ABS制御のみが実行された場合には第2実行回数RKをインクリメントする。そして、ECUは、第1実行回数FKが第1実行回数閾値KFK以上であった場合(ステップS52が肯定判定)には連通制御許可フラグFLGrに「1」とセットする(ステップS53)一方、第2実行回数RKが第2実行回数閾値KRK以上であった場合(ステップS54が肯定判定)には連通制御許可フラグFLGrに「0(零)」とセットする(ステップS55)。
(もっと読む)
自動二輪車両の制動制御装置、及び自動二輪車両の制動制御方法
【課題】連通制御の実行中に運転手がブレーキ操作手段を操作した場合に、該ブレーキ操作手段の操作に対して運転手が感じる違和感を低減させることができる自動二輪車両の制動制御装置、及び自動二輪車両の制動制御方法を提供する。
【解決手段】ECUは、連通制御が開始されると、第1開閉弁31f,31r及び第2開閉弁32f,32rを個別に開閉駆動させ、液圧回路上における下流側ブレーキ液路よりも上流側と下流側ブレーキ液路とを連通状態にする。また、ECUは、連通制御中、モータを回転させ続けることにより、ポンプを駆動させる。そして、ECUは、連通制御の完了に基づき各開閉弁31f,31r,32f,32rの開閉駆動を停止させてから設定時間KT2の経過後、モータの回転を停止させる。すなわち、ECUは、ポンプの駆動を停止させる。
(もっと読む)
自動二輪車両の制動制御装置、及び自動二輪車両の制動制御方法
【課題】連動制動機構内の下流側ブレーキ液路内に上流側ブレーキ液路内に対する負圧が発生した場合に、該負圧を解消させることができる自動二輪車両の制動制御装置、及び自動二輪車両の制動制御方法を提供する。
【解決手段】ECUは、自動二輪車両のイグニッションスイッチが「オン」である場合において、ブレーキペダル及びブレーキレバーが非操作状態であると判定したときには、連動制動機構に対して連動用制御パターンP2に基づく連動用連通制御を実行する。この連動用連通制御中では、第1連動用流入側開閉弁36aが閉じ状態になると共に、第1連動用流出側開閉弁36bが開き状態になる。そして、連動用連通制御が開始された時点から連動用実行時間KT2が経過した場合、第1連動用流出側開閉弁36bは一気に閉じ状態になる一方、第1連動用流入側開閉弁36aは、閉じ状態から徐々に開き状態になる。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】運転手がブレーキ操作手段を操作した場合に、その操作量に対して運転手が感じる違和感を低減させることができる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、イグニッションスイッチが「オン」になった場合において非ブレーキ操作判定条件Aが成立しているときには連通制御を実行する(ステップS24)。一方、ECUは、イグニッションスイッチが「オン」になった場合において非ブレーキ操作判定条件Aが非成立であるときには規制回数RCを「1」だけインクリメントする(ステップS20)。そして、ECUは、規制回数RCが規制回数閾値KRC以上である場合(ステップS22が肯定判定)には、報知制御を実行する(ステップS23)と共に連通制御を実行する(ステップS24)。
(もっと読む)
ディスクブレーキ装置
【課題】熱倒れひいてはジャダーの発生を良好に抑制できるディスクブレーキ装置を提供する。
【解決手段】ディスクロータ1の放熱による変形の経時変化に応じてセンタリング動作の要否判定及びセンタリング動作時の動作条件(インターバル・回数)の設定を行い、センタリング動作を行う場合には、設定された動作条件(ディスクロータ1の放熱による変形の経時変化に応じて設定される)に沿って、ソレノイド9を駆動してセンタリング動作〔走行中における冷却過程で、一対のブレーキパッド2,3をディスクロータ1に接触させた後に当該接触状態を解除する〕を行う。このため、ディスクロータ1の放熱による変形の経時変化に応じたクリアランス調整を行なえ、かつブレーキパッド2,3のディスクロータ1との接触時間が少なくなりディスクロータ1の肉厚変動(DTV)が抑止され、ひいてはジャダーの発生を抑制できる。
(もっと読む)
右折待機に対し改善された駆動制御を行う車輌
【課題】車輌の右折待機時間は比較的長く、その後の発進には機敏性が求められることに鑑み、天然資源の節約と大気保全に最大限に寄与しつつ、右折の機敏性を損なわないよう、右折待機に対し改善された駆動制御を行う。
【解決手段】車輌が対向車線を横切る右折に対し待機している間に駆動力低減制御を行っているとき、前方視野車輌検出手段により対向車を検出したことに基づいて、駆動力低減制御の少なくとも一部を解除して右折発進に備える。
(もっと読む)
161 - 180 / 217
[ Back to top ]