
Fターム[3D246HC03]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | モデルによるもの (122) | 車両モデルによるもの (65)
Fターム[3D246HC03]に分類される特許
1 - 20 / 65
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
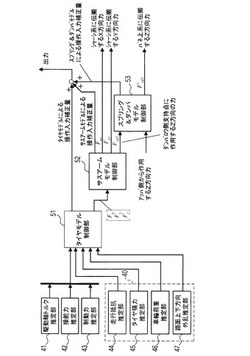
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両制御装置

【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
衝突回避装置
【課題】本発明は、運転者が意図しない進路変更において、対象物を回避し、当該対象物との衝突を未然に防止することのできる衝突回避装置を提供する。
【解決手段】ドライバによりステアリングが操作され(S10)、ドライバによりウインカーレバーが操作されないと(S12)、自車両の進路予測を行い(S14)、自車両の走行している走行レーンが認識不可能な場合(S16)、或いは自車両の走行している走行レーンが認識可能であってもドライバのステアリング操作により走行レーンを逸脱する虞がない場合(S24)に自車両の進路上に衝突対象物があれば(S18)、スピーカより警報を発声し(S20)、更に衝突対象との衝突を回避するように操舵アシスト及びブレーキ操作アシストを作動する(S22)。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力及び回避軌道を導出する。
【解決手段】所望の位置、該位置での速度の方向、及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、自車両と所望の位置との距離のx成分Xe、距離のy成分Ye、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を求めるために導入した第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、第3の導入パラメータη3の特定仮定下での値η3’との関係を定めた低速化3次元マップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を導出する。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両の前後加速度修正装置を備えた車両の諸元推定装置、及び車両の前後加速度修正装置
【課題】
前後加速度の誤差を考慮して、車両の積載量によって変化する車両諸元(例えば、車両重量)を精度良く推定するための前後加速度の修正装置を提供する。さらに、この前後加速度修正装置によって推定された前後加速度の情報に基づいて高精度に車両諸元を推定する。
【解決手段】
車両の前後加速度修正装置は、車両の前後加速度(Gxa)を取得する前後加速度取得手段(GXA)と、前記車両に作用する走行抵抗(Grr)を取得する走行抵抗取得手段(GRR)とを備え、前記前後加速度(Gxa)から前記走行抵抗(Grr)を除いて修正加速度(Gxs)とする。車両の諸元推定装置は、加速操作量取得手段(ASA)によって取得される加速操作量(Asa)、或いは、減速操作量取得手段(BSA)によって取得される減速操作量(Bsa)と、前記修正加速度(Gxs)とに基づいて、前記車両諸元を推定する。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
走行制御システム、制御プログラム、記録媒体
【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ABS制御中に車両挙動制御を実行する場合に、ブレーキ液圧の急変を抑制し、ブレーキフィーリングを向上させることを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車両の旋回状態に基づいて制御対象車輪を加圧するのに必要な加圧液圧を算出する加圧液圧算出部121Aと、車両の旋回による横加速度を取得し、当該横加速度に基づいて制御対象車輪が存在する前後位置における左右の車輪に掛かる荷重比を算出する荷重比算出部121Bと、車両挙動制御の制御対象車輪と前後位置が同じで左右逆側の車輪の推定液圧を制御対象車輪の基本液圧とし、当該基本液圧を荷重比で補正した修正基本液圧を算出する修正基本液圧算出部121Cとを備え、アンチロックブレーキ制御中に車両挙動制御を実行する際には、修正基本液圧に加圧液圧を加算することで、目標液圧を算出するように構成される。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
1 - 20 / 65
[ Back to top ]