
Fターム[3D246JB10]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 上限値、下限値の設定 (139)
Fターム[3D246JB10]に分類される特許
61 - 80 / 139
電気車用定位置停止制御装置
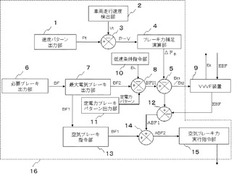
【課題】車両の低速走行領域でも定位置停止精度を向上させることを達成する。
【解決手段】低速条件指令部10より、第3演算部8へ出力される低速走行パターンと、定電力ブレーキパターン出力部11より第3演算部8へ出力される定電力ブレーキパターンにより最大電気ブレーキ力BF2が低速条件・最大電気ブレーキ力BF21となる。低速条件・最大電気ブレーキ力BF21は、低速領域では、最大電気ブレーキ力BF2よりも低いブレーキ力を使用しているため、低速条件・最大電気ブレーキ力BF21で目標停止位置に停止することが困難な場合は、最大電気ブレーキ力BF21までブレーキ力を上げ、目標停止位置に停止することを可能とする。
(もっと読む)
牽引車輌の制御装置

【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の駆動輪がロックする傾向にあるときに、電気自動車の運転状態に応じて駆動輪のスリップを適正に制御するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)がロックする傾向にあるときに、電動機(6)をモータ作動または発電機作動に切り換えて制御することにより、駆動輪(16,18)の路面に対するスリップ率を目標スリップ率に近付ける。このとき、ハイブリッド電気自動車(1)が直進運転状態にある場合には、車両ECU(24)が第1スリップ率を上記目標スリップ率とする。一方、ハイブリッド電気自動車(1)が旋回運転状態にある場合には、車両ECU(24)が上記第1スリップ率よりスリップ率の増大側に設定された第2スリップ率を上記目標スリップ率とする。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
ブレーキ制御装置
【課題】フェールセーフ時のブレーキフィーリングおよび車両姿勢の制御性の低下を抑える。
【解決手段】ブレーキ制御装置は、ブレーキ液を供給してホイールシリンダに液圧を発生させる複数の配管系統と、複数の配管系統によるホイールシリンダへのブレーキ液の供給を制御する制御部と、を備える。複数の配管系統は、それぞれを流れるブレーキ液に関して互いに独立しており、制御部は、配管系統に異常が発生した場合に、ホイールシリンダの液圧が目標液圧を上回っている場合には異常配管系統の制御を停止し、ホイールシリンダの液圧が目標液圧を下回っている場合には異常配管系統の制御を継続する。
(もっと読む)
ブレーキ制御装置
【課題】ホイールシリンダに作動液を供給するためのモータを効率よく駆動させ、制動に用いる電力の消費を抑えることができるブレーキ制御装置を提供する。
【解決手段】液圧回路を介したホイールシリンダへのブレーキ液の供給によりホイールシリンダに液圧を供給し、当該液圧により車輪に制動力を付与するブレーキ制御装置において、液圧源は、液圧回路中に設けられ、モータの回転数に応じてホイールシリンダに液圧を供給する。液圧調整弁は、通電制御により開度が調節されて、ホイールシリンダの液圧を調整する。制御部は、モータの回転数と液圧調整弁の開度を制御することで車輪に付与する制動力を制御する。その制御部は、所定車速以下である場合に、モータを停止しつつ液圧調整弁の開度を調節して車輪に制動力を付与する制御を実行する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。
【解決手段】
車両の緊急状態を回避するために車輪に制動トルクを付与する回避制御を実行するための第1目標量(回避制御の目標量)を演算する回避制御手段と、車両の安定性を確保するために、車輪のうちから選択車輪を決定し、この選択車輪に制動トルクを付与する安定化制御を実行するための第2目標量(安定化制御の目標量)を演算する安定化制御手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを第1目標量に基づいて制御するとともに、選択車輪に付与する制動トルクを、第1目標量及び前記第2目標量に基づいて制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なシステム構成にて実現する。
【解決手段】
車両の緊急状態を回避する回避制御の目標減速度を演算する回避制御手段と、選択車輪に制動トルクを付与して車両の安定性を確保する安定化制御の目標スリップ速度を演算する安定化制御手段と、実車輪速度を取得する車輪速度取得手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを目標減速度に基づいて制御するとともに、選択車輪に付与する制動トルクを選択車輪の目標スリップ速度、及び、非選択車輪の実車輪速度に基づいて制御する。
(もっと読む)
車両運動制御装置
【課題】ロール角がロール限界値に達する可能性をより低くでき、横転抑制効果をより高くできるようにする。
【解決手段】実スリップ率Saの減少に対する横加速度Gyの増加率が大きい場合に、減圧モード時に設定される減圧デューティDDutyが制限されるようにする。これにより、W/C圧の減圧に伴う制動力の増加が抑制され、実スリップ率Saの減少が抑制されることになり、実スリップ率Saの低下に起因する横加速度Gyの増加、引いてはロール角の増加を抑制できる。したがって、ロール角がロール限界値を超えることを防止でき、横転抑制を効果的に行うことが可能となる。
(もっと読む)
ブレーキシステムを制御する方法
【課題】制動下で車両の後車軸が持ち上がるのを防止することを目的とした、車両のブレーキシステムを制御する方法を提供する。
【解決手段】より詳細には、本発明は、少なくとも1つの前輪および少なくとも1つの後輪を備える車両のブレーキシステム(19)を制御するための方法であって、後輪が持ち上がる少なくとも1つの状態が存在するかどうかを判定するステップと、そうした状態が存在する場合に、車両のブレーキシステムによって前輪に加えられる制動の作用力を制限および/または低減するステップとを含むことを特徴とする方法に関する。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
車両および車両の制御方法
【課題】動力源から車輪に動力を伝達するための動力伝達機構に過大なトルクが発生することを回避する。
【解決手段】ECU150は、車両100が波状路を走行中に急制動が実行された場合には、ブレーキ油圧が閾値以下となるようにブレーキ油圧を制御する。ブレーキアクチュエータ120はECU150の制御により油圧ブレーキ30,32,50,52に供給する油圧を制御する。好ましくは、ECU150は、ブレーキ油圧が、アンチロックブレーキ制御の実行時における油圧の実効値よりも大きくなるようにブレーキ油圧を制御する。これにより、モータの動力を車輪に伝達する動力伝達機構(伝達部材15,41、減速機22,42、車軸28,48)に過大なトルクが発生することを回避できる。
(もっと読む)
ブレーキ制御装置
【課題】運転者の意図に応じた液圧保持制御を実行するブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置20は、停車時のレギュレータ圧センサ71により検知された液圧値を記憶するマスタ圧記憶部106と、停車中にレギュレータ圧センサ71により検知された液圧値を取得するマスタ圧取得部102と、取得された液圧値が、記憶された液圧値よりも所定値以上大きくなると、液圧保持制御を実行する実行部120とを備える。マスタ圧更新部108は、マスタシリンダユニットと動力液圧源とが連通している場合に、記憶された液圧値を、レギュレータ圧センサ71により検知された液圧値に更新する更新処理を実行する。
(もっと読む)
車両のオートクルーズ装置
【課題】加速中に前方車両が直前に車線変更した場合や、低速走行の前方車両が直前に車線変更した場合でも、車速の急変を生じないオートクルーズ制御となす。
【解決手段】S11で通常のオートクルーズ用の基本加減速度ABを計算する。S12では、隣接車線走行中の左右前方車両が自車線へ車線変更する可能性(車線変更度PL,PR)を演算する。S13では、左右前方車両と自車との間における時間的車間距離(自車が前方車両に到達するまでの時間)TYL,TYRを演算する。S14では、左右前方車両の車線変更度PL,PR、および、左右前方車両との間の時間的車間距離TYL,TYRから、左前方車両を考慮した場合の加速度上限値ALと、右前方車両を考慮した場合の加速度上限値ARとを求め、両者のうちの小さい方を最終的な加速度上限値Aとする。S17では、ABを自車が発生するようアクセルペダルやブレーキ装置を駆動する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】 運転者の意図する旋回挙動を実現できる車両挙動制御装置および車両挙動制御方法を提供する。
【解決手段】 車両の左右後輪に対して左右独立に駆動力を付与可能な駆動力配分制御装置と、各輪に対し独立して制動力を付与可能なブレーキ制御装置と、車両挙動(ヨーレイト)を検出する目標ヨーレイト算出部307と、検出された車両挙動に基づいて車両のアンダーステアとオーバーステアを判断する車両挙動状態判断部310と、車両挙動状態判断部310の判断結果に応じて駆動力を増加し、駆動力配分制御装置を制御する駆動力制御部(駆動力配分算出部311,目標エンジントルク算出部313)およびブレーキ制御装置を制御する目標制動力算出部312と、を備えた。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】低い電圧でも充分な制動性能を発揮することを可能とするブレーキ制御技術を提供する。
【解決手段】ブレーキ制御装置10は、作動液圧に応じて第1の車輪に制動力を付与する第1ホイールシリンダと、作動液圧に応じて第2の車輪に制動力を付与する第2ホイールシリンダと、電流の供給を受けて第1ホイールシリンダの作動液圧及び第2ホイールシリンダの作動液圧を個別的に制御するブレーキアクチュエータ80と、ブレーキアクチュエータ80に電流を供給する電源と、電源の充電状態に基づいて第1及び第2の車輪間の制動力配分を設定し、該制動力配分に従ってブレーキアクチュエータ80を制御する制御部と、を備える。
(もっと読む)
車両の制動力制御装置
【課題】ブレーキ操作に基づく制動力に起因して過大なトルクが無段変速機に伝達されることを抑制することのできる車両の制動力制御装置を提供する。
【解決手段】本発明の車両の制動力制御装置は、無段変速機を搭載した車両についてその駆動輪の回転を制動するものであって、ブレーキの踏み込み量BPに基づいて駆動輪に対する制動力BFの大きさを調整する制動装置を備え、制動力BFに基づく駆動輪の減速度が許容限界速度よりも大きくなる状態を過大トルク入力状態として、この過大トルク入力状態が生じる条件である制限条件が成立している旨推定したとき、制動装置の制動力BFに上限値BFLを設定する制御手段を備える。
(もっと読む)
車両用制動制御装置
【課題】 回生協調制御により回生制動トルクと摩擦制動トルクとをすり替えるときの減速度の変動を抑制できる車両用制動制御装置を提供する。
【解決手段】 統合コントローラ110は、回生協調制御時、回生制動トルク変化量ΔRegが大きいほど、インプットロッドストロークXiの変化量に対するプライマリピストン2bの変化量を減少させるアシスト推力補正手段を備える。
(もっと読む)
車両横転防止制御装置および車両横転防止制御方法
【課題】 横転判断精度を高めることができる車両横転防止制御装置および車両横転防止制御方法を提供する。
【解決手段】 車両挙動を制御するために作動するブレーキ装置と、ドライバの操舵に基づいて車両に対し所定のロールが発生することを予測すると共に、ドライバによる操舵の切戻しを検出する操舵入力判断部23と、操舵の切戻しが検出されたときに横転判断を行うARP制御介入判断部29と、操舵入力判断部23により所定のロールが発生すると予測され、かつ、ARP制御介入判断部29により横転判断された場合、アクチュエータであるブレーキ装置を制御し横転防止制御を行うARP制御部22と、を備えた。
(もっと読む)
61 - 80 / 139
[ Back to top ]