
Fターム[3D246JB10]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 上限値、下限値の設定 (139)
Fターム[3D246JB10]に分類される特許
21 - 40 / 139
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
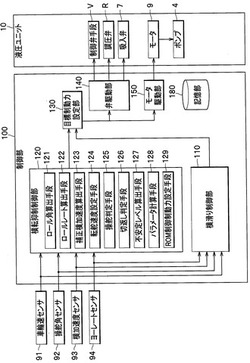
車両挙動制御装置および車両挙動制御方法

【課題】車両の走行状態に応じた挙動制御をより適切に行うこと。
【解決手段】車速を取得する車速取得手段と、車体の上下挙動を取得する上下挙動取得手
段と、前記上下挙動取得手段が取得した車体の上下挙動の最大値を取得する上下挙動最大
値取得手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記車速取
得手段が取得した車速とに基づいて、制動力の上限を示す上限指令値を設定する上限指令
値設定手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記上限指
令値設定手段が設定した前記上限指令値とに基づいて、制動力の指令値を設定する制動力
指令値設定手段と、前記制動力指令値設定手段が設定した制動力の指令値に基づいて、車
輪に対する制動力を付与する制動手段とを備える。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなくブレーキペダル操作量に応じた制動力を得ることが可能なブレーキ制御装置を提供すること。
【解決手段】 本発明では、ブースタの倍力が無効とされる第1のストローク領域を備えた液圧制御装置に、第1のストローク領域ではドライバ要求制動力を実現するようにホイルシリンダ圧の液圧サーボを行い、第2のストローク領域では、ストローク量に対応して設定された目標ホイルシリンダ圧と目標マスタシリンダ圧との関係を維持するようにポンプや制御弁を制御することとした。
(もっと読む)
ブレーキ制御装置
【課題】 ポンプの作動頻度を抑制できるブレーキ制御装置を提供する。
【解決手段】 2系統のブレーキ配管系のうちP系統に設けられ、マスタシリンダM/Cのプライマリ室15aとホイルシリンダW/Cとの間の第1ブレーキ回路(管路11,18)に配置されたゲートアウトバルブ12と、第1ブレーキ回路であってプライマリ室15aとゲートアウトバルブ12との間から分岐する還流油路部17を有する分岐油路16と、還流油路部17に設けられたストロークシミュレータバルブ27と、ストロークシミュレータバルブ27を経由しマスタシリンダM/Cからのブレーキ液が流れ込むリザーバ34と、リザーバ34を介してブレーキ液を吸入して還流油路部17から分岐油路16に吐出するポンプ35と、を備えた。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤ形式のブレーキ装置において流路抵抗によってVSA装置などの液圧制御装置の機能が低下することを防止する。
【解決手段】ブレーキ装置1を、ブレーキペダル11の操作量Psに対応して液圧を発生するマスターシリンダ15と、マスターシリンダ15とホイールシリンダ2b・3bとの間に配置される電磁弁24a・24bと、電磁弁24a・24bよりもホイールシリンダ2b・3b側に設けられ、ブレーキ液圧を発生するモータ駆動シリンダ13と、モータ駆動シリンダ13とホイールシリンダ2b・3bとを結ぶ油路22e・22f上に設けられ、ホイールシリンダ2b・3bに供給されるブレーキ液圧を制御するVSA装置26とを有し、VSA装置26の動作時に、電磁弁24a・24bを開放した状態でモータ駆動シリンダ13を所定の目標加圧モータ角θatをもって加圧側に駆動する制御ユニット6をさらに有するようにする。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
駆動力分配装置
【課題】 電動モータにより歯車手段の回転を制御して駆動力を分配する際に、2つの出力軸に大きな回転差が発生しても歯車手段の歯車や各回転要素の回転速度が許容回転速度を超えることがない駆動力分配装置を提供する。
【解決手段】 遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第1の許容回転速度を超えた場合、ブレーキ指示をONにして左右の後輪6に制動力を働かせ、遊星歯車機構51の歯車の回転速度や電動モータ13の回転速度が第2の許容回転速度を超えた場合、エンジン2の出力が低減され、左右駆動力分配装置11の歯車等の部品(軸受け)の回転速度の上昇を抑制し、左右の後輪6に大きな回転差が発生しても歯車や各回転要素の回転速度が許容回転速度を超えないようにする。
(もっと読む)
ブレーキ装置
【課題】ホイールシリンダのピストンを共用する液圧制動装置とパーキングブレーキ装置とを効率的に制御する技術を提供する。
【解決手段】ブレーキ装置は、ホイールシリンダ内に配設したピストンを共用する液圧制動装置とパーキングブレーキ装置とを有する。状態量取得部300は、液圧回路における状態量を取得する。処理部320は、状態量取得部300により取得された状態量が所定の判定条件を満足するか判定し、所定の判定条件を満たさなければ、特定の状態が発生したことを判定する。処理部320は、パーキングブレーキ装置の動作が開始されたことを検出すると、所定の判定条件を用いた判定処理を変更する。
(もっと読む)
車両制御装置
【課題】 カーブの走行安定性をより高めることができる車両制御装置を提供する。
【解決手段】 先行車と自車との相対関係を維持または設定された速度を維持するように自車の速度を制御するACC制御のACC指令値Gaccを演算するACC指令値演算部201と、自車に作用する横加加速度Gy'に基づき自車の速度を制御するGFC制御のGFC指令値Ggfcを演算するGFC指令値演算部202と、ACC指令値GaccまたはGFC指令値Ggfcのうち車両に作用する減速度の大きな指令値を選択する指令値選択部203と、選択されたACC指令値GaccまたはGFC指令値Ggfcに基づいてブレーキ液圧ユニット101およびエンジン121を駆動し自車の速度を制御する速度制御部204と、を備えた。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
ブレーキスイッチの異常検出装置
【課題】 ブレーキスイッチの異常を精度良く検出可能なブレーキスイッチの異常検出装置を提供すること。
【解決手段】 本発明では、ブレーキストローク検出手段により検出されたストローク量と、ブレーキスイッチにより検出されたブレーキペダルの作動状態とに基づいて、ブレーキスイッチの異常を判断することとした。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
コンピュータプログラム及び数値計算装置
【課題】分布定数系の微分方程式を少ない演算量で解けるようにする。
【解決手段】全ての計算時刻について値が与えられる第1の変数と、初期値のみが与えられる第2の変数とで定義される被積分関数に関する積分演算をコンピュータで実行し、各計算時刻で使用する前記第2の変数の値を算出するために、以下の処理を実行する。まず、被積分関数を第2の変数について偏微分して求めた偏導関数を記憶装置から読み出す。各計算時刻では、初期値又は直前回の計算時刻に算出された第2の変数の値と、現計算時刻に与えられる第1の変数の値を、被積分関数と偏導関数にそれぞれ代入して現計算時刻における被積分関数の値と偏導関数の値をそれぞれ算出する。この後、算出された被積分関数の値を初期値とし、かつ、当該被積分関数の値に偏導関数の値を乗算して算出された値を傾きとする指数関数を用い、次回計算時刻に使用する第2の変数の値を算出する。
(もっと読む)
車両用ブレーキ制御装置
【課題】摩擦制動力と回生制動力とを併用した回生協調ブレーキ制御を行うとともにABS制御を実行する車両用ブレーキ制御装置において、ABS制御実行中においてABS制御に悪影響を与えることなくエネルギー効率を高めることができるものの提供。
【解決手段】この車両用ブレーキ装置は、前輪側の制動力を、摩擦制動力である液圧制動力(前輪側VB液圧分Fvbf+リニア弁差圧分Fval)と、回生制動力Fregとにより制御し、後輪側の制動力を、液圧制動力(後輪側VB液圧分Fvbr)のみにより制御することで回生協調ブレーキ制御を実行する。そして、この装置は、ABS制御実行中において、限界回生制動力Freglimitを、回生制動対象車輪である前2輪に働いた場合に前2輪にロックが発生しない範囲内の制動力の最大値に設定し、回生制動力Fregを同限界回生制動力Freglimitを超えないように調整する。
(もっと読む)
車両の制御装置
【課題】坂路で車両を停止させる際、制動装置を制御するソレノイドバルブの作動回数を抑制すると共に、車両の移動を抑制することができる車両の制御装置を提供する。
【解決手段】坂路においてブレーキペダル36の踏み込みが解除されても、制動手段100によって車速Vの上昇が制限されるため、規定時間Ta内ではパーキングロック可能な車速Vに制限される。したがって、パーキングレンジが選択された際に、ブレーキ油圧Pbkを制御するソレノイドバルブ50を再度作動させることが防止され、ソレノイドバルブ50の作動回数増加による耐久性低下が抑制される。また、ブレーキペダル36の踏み込みが解除されると、ホイールブレーキ46のブレーキ油圧Pbkが急激に低下せず、所定の勾配ΔPで低下するに従い制動力が発生するため、その車両の移動が抑制される。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
21 - 40 / 139
[ Back to top ]