
Fターム[3D246JB10]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 上限値、下限値の設定 (139)
Fターム[3D246JB10]に分類される特許
101 - 120 / 139
4輪駆動車両の制御システムおよび制御方法
各車軸に少なくとも1つのパワートレインを備える4輪駆動ハイブリッド車両において、第1のパワートレイン(1)が少なくとも1つの熱機関を含み、第2のパワートレイン(2)が少なくとも1つの電気機械を含む。制御システムは、摩擦ブレーキシステムと、1つのパワートレインの少なくとも1つの電気機械であって抵抗トルクを与えることができる電気機械との間でブレーキ要求を振り分ける配分手段(9)、センサからの信号に応じてブレーキシステムとパワートレインを出力先とするトルク設定値変調手段(10)、ならびにパワートレインの制御手段(8)を含み、該配分手段(9)、該トルク設定値変調手段(10)およびパワートレインの該制御手段(8)が動的に相互に作用することができ、それによって車両の安定に有利となるようにパワートレインおよび摩擦ブレーキシステムに対してトルク命令を送出する。 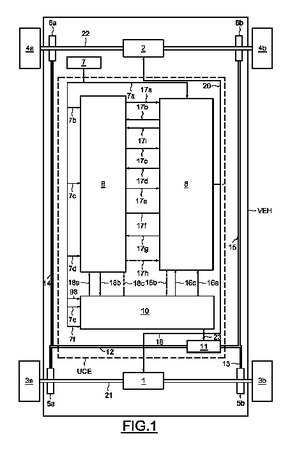 (もっと読む)
(もっと読む)
駐車ブレーキ制御装置
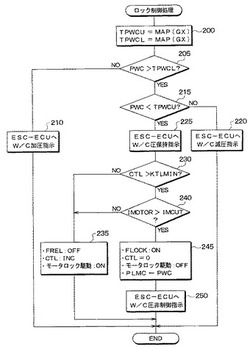
【課題】駐車ブレーキにおけるロック制御時に、サービスブレーキにより発生させられる大きなW/C圧によってパッド磨耗が大きくなること等を防止する。
【解決手段】駐車ブレーキにおけるロック制御時に、ドライバのブレーキペダルの操作に基づくサービスブレーキにより発生させられるW/C圧が大きい場合(ステップ205)、W/C圧が目標W/C圧上限値TPWCUよりも低下させる(ステップ220)。これにより、サービスブレーキにより発生させられる大きなW/C圧によってパッド磨耗が大きくなることを防止できる。また、キャリパやブレーキ機構の体格重量等が大きくなることを防止でき、キャリパやブレーキ機構の小型化を図ることが可能となる。
(もっと読む)
車両の運転支援装置

【課題】実際の回避走行に沿った目標自車進路を設定して自然な運転支援を行う。
【解決手段】制御ユニット5は、対象物と自車両1との相対速度Vfと対象物の種類に応じて対象物からの横移動量Wを設定し、対象物からの横移動量Wと距離dとに基づいて目標自車進路を推定し、最大横加速度(d2y/dt2)maxを推定する。そして、最大横加速度(d2y/dt2)maxが、警報制御閾値Ca以上の場合は警報制御を行ない、ブレーキ制御閾値Cb以上の場合は警報制御を行うと共にブレーキ制御を行う。また、許容最大横加速度(d2y/dt2)max_cを設定し、許容最大横加速度(d2y/dt2)max_cと対象物からの横移動量Wと自車速Vとに基づいて限界自車進路を推定して必要横加速度(d2y/dt2)cを演算し、実横加速度(d2y/dt2)rと必要横加速度(d2y/dt2)cとに基づいて操舵制御を行う。
(もっと読む)
自動二輪車の走行運動の安定化方法および装置
本発明は、傾斜センサを介して走行路面に対する自動二輪車の傾斜角が測定され、および前記傾斜角が計算装置内において処理されたのちに、それに基づく制御信号が、走行運動への安定化操作を行わせるために、制御装置に供給されるようにした、オートバイのような自動二輪車の走行運動の安定化方法において、この場合、少なくとも1つの姿勢角検出センサにより、自動二輪車の姿勢角が測定され且つ前記制御装置内において同時処理されるようにした、自動二輪車の走行運動の安定化方法に関するものである。本発明は、方法と、該方法を実行するための手段を有する装置に関するものである。 (もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】 常閉電磁弁の発熱を抑制できるブレーキ制御装置を提供すること。
【解決手段】 運転者のブレーキ操作に応じて演算された目標ホイルシリンダ圧になるように電磁弁(第2増圧制御弁7)を駆動するブレーキ制御装置において、車両の停止状態を判断する停止判断手段(車輪速センサ14)と、電磁弁を駆動するコントロールユニットCUと、を備え、電磁弁は、少なくとも液圧源(ポンプP)とホイルシリンダ5との間に設けられ、閉弁時には液圧をホイルシリンダ5内に閉じ込め、ホイルシリンダ圧が作用する方向に弁体が閉弁する常閉弁であって、コントロールユニットCUは、停止判断時に目標ホイルシリンダ圧の閾値上限を上記演算された目標ホイルシリンダ圧の閾値上限α1に対して増加させることとした(α2>α1)。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止のために付与する逸脱防止操舵トルクが運転者に違和感を与えてしまうことを防止する。
【解決手段】車線逸脱防止装置は、運転者の操舵トルクの入力方向と逸脱防止操舵トルクの付与方向とが、転舵輪の転舵方向で一致する場合(ステップS3又はステップS8で“Yes”の判定の場合)、該逸脱防止操舵トルクの付与を制限する(ステップS5)。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】制動装置全体の消費電力の増加を抑制しつつ、ブレーキロータ及びブレーキパッドの偏摩耗の発生を抑制できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、路面判定処理を実行して車両の走行する路面の悪路指数を演算する(ステップS10)。そして、ECUは、ステップS10にて演算した悪路指数に基づき、車両の走行する路面が凹凸度合の比較的大きな悪路から凹凸度合の比較的小さな良路に変わったか否かを判定する(ステップS11)。この判定結果が肯定判定である場合、ECUは、路面が悪路から良路に変わったと判断し、モータを駆動させてホイールシリンダ内にブレーキ液を流入させる(ステップS13)。すると、各ブレーキパッドがブレーキロータに摺接する結果、ブレーキロータの各ブレーキパッドに対する傾斜が解消される。
(もっと読む)
車両運動制御システム
【課題】左右の駆動輪の車輪速度差が大きくなり易い状況下にて駆動力配分制御によるトラクション制御が行われるときに、駆動力配分制御の耐久性の悪化を抑制できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システムは、左右の車輪に駆動力を付与すると共に左右の車輪への駆動力配分を制御(駆動力配分制御)できる駆動力配分制御装置と、左右の車輪の制動力を独立して制御(制動力制御)できる制動力制御装置とを備える。また、車輪のスリップを抑制するためのトラクション制御が行われる。また、この車両運動制御システムは、車輪の現在位置における路面の摩擦係数に関する情報(路面μ情報)を取得する路面μ情報取得手段を備える。そして、路面μ情報に基づきアクセル開度の上限値が設定されると共に、現在のアクセル開度が上限値以下のときにのみ駆動力配分制御によるトラクション制御が行われる。
(もっと読む)
車線逸脱防止装置及び車線逸脱防止方法
【課題】車両の走行車線に対する逸脱傾向の度合いが小さくても、車両の逸脱をより防止可能とする。
【解決手段】走行車線に対する車両の逸脱傾向の度合いに応じたヨーモーメントM1を算出し、その算出したヨーモーメントM1に応じた目標ヨーモーメントMsを車両に付与する。その際に、算出したヨーモーメントM1が最小目標ヨーモーメントMmin以下の場合には、時間と共に増加する最小制御ヨーモーメントMsmを使用する。この最小制御ヨーモーメントMsmの初期値Msm0は、最小目標ヨーモーメントMminよりも小さい値である。
(もっと読む)
カーブ走行における自動二輪車のドライバの支援装置および方法
【課題】カーブ走行における自動二輪車のドライバの支援装置および方法を提供する。
【解決手段】カーブ走行における自動二輪車のドライバの支援装置は、事故を回避するために、少なくとも走行状況(「カーブ走行」)および車両ブレーキ(6)の操作を検出可能にするための装置(10、3、4)と、種々の走行状態変数から最大ブレーキ力または等価変数を決定し且つドライバにより希望されたブレーキ力ないしは対応の変数をこの値に制限するユニット(10、4、5)と、ブレーキ作動に基づく起立モーメント(MA)に抵抗するステアリング運動量を自動二輪車(1)のステアリング装置(7)に与えるステアリング・アクチュエータ(10、7)と、を含む。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段30と、拘束条件演算手段での拘束条件を満たしている状態で、少なくとも速度の分散の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段30とを備えることを特徴とする。
(もっと読む)
車両の制御装置
【課題】コースト走行時にロックアップクラッチをスリップ制御してフューエルカット制御を実行している場合に、急制動が作用してもエンジンストールを防止する。
【解決手段】ECUは、減速スリップロックアップ実行中かつフューエルカット実行中に(S1000にてYES)、ブレーキがオンになると(S1100にてYES)、エンジン回転数を検出して、エンジン回転数変化量ΔNEを算出して、エンジンストール危険度Cを算出するステップ(S1020〜S1030)と、到達予測回転数がエンジンストール危険エンジン回転数Bよりも低いと(S1060にてYES)、マップおよびエンジンストール危険度Cに基づいて減圧量を算出するステップ(S1080)と、ブレーキ作動圧を算出した減圧量だけ減圧するようにブレーキ油圧回路を制御するステップ(S1090)とを含む、プログラムを実行する。
(もっと読む)
坂道での運転操作をアシストする方法
本発明は、車両の坂道での運転操作をアシストする方法に関するものであり、前記車両は、駆動輪に変速装置を介して、及びクラッチまたはトルクコンバータを介して接続される推進ユニットと、アシスト付きパーキングブレーキと、を備え、本方法を実行している間に、始動閾値トルクを前記車両の車輪と路面との間の前後力の関数として決定し、異常運転では、すなわち勾配の特徴量に対応し、かつ使用できない信号を受信する場合、及び/またはコンピュータが結合ギア比の信号特徴量を利用できない場合に、前記始動トルクの閾値を、前記勾配の前記特徴量、及び/又は前記ギア比の前記特徴量の実際値を考慮に入れることなく決定することを特徴とする。  (もっと読む)
(もっと読む)
自動車のペダル位置に関連する設定値を決定するシステム
本発明は、2個のセンサ(24、26)を具備する種類の自動車(10)においてペダル(22)の位置に関連する設定値を決定するためのシステムに関し、前記2個のセンサの各々が前記位置に関連する値を測定する。本システムは、ペダル(22)の所定の切換え位置の第1状態と第2状態との間で切り換えを行う手段(28)と、2個のセンサによる測定値と切換え手段の現在の状態とに基づいて設定値を生成する手段(60;70)とを具備する。本発明に従い、生成手段(60;70)は、切換え手段(28)第1状態にあるときの最小ペダル位置に対応する測定値と、切換え手段(28)第2状態にあるときの最大ペダル位置に対応する測定値とを選択することが可能である。  (もっと読む)
(もっと読む)
車両用運転支援装置
【課題】障害物との衝突を効率よく回避することができ、信頼性の高い車両用運転支援装置を提供する。
【解決手段】障害物検出用カメラ2で障害物を検出してその障害物Bまでの距離と衝突回避に必要な横移動量とを算出する。これらと、タイヤ状態センサ3や路面μセンサ4、ブレーキ踏み量センサ10、舵角センサ11、ヨーレートセンサ12を用いて算出される最大減速度及び最大横加速度とから操舵回避限界及び制動回避限界を求める。この操舵回避限界及び制動回避限界に基づいて制動アシスト及び操舵アシストの開始タイミングを算出し、自動ブレーキアクチュエータ7と操舵アシストアクチュエータ6を効率よく組み合わせて制御する。
(もっと読む)
パーキングブレーキおよびそれを動作するための方法
【解決手段】
パーキングブレーキ、およびこれを動作するための方法である。
この発明は、アクチュエータ(5)を有するパーキングブレーキに関し、アクチュエータ(5)は、2つの方向に動作することができ、さらに、アクチュエータ(5)のセルフロックのギア機構(24)によって、回転要素の方向に、またはそれから離れるようにパーキングブレーキを作動するか、または解除するための少なくとも1つのブレーキシューを移動する直流モータ(28)によって駆動される。
直流モータの運動の開ループ、または閉ループ制御を実行するための制御装置(10)も提供され、パーキングブレーキは、このパーキングブレーキが作動されるか、または解除されるときに、回転要素に対するブレーキシューの作動ポイントが、一般には行き過ぎるように設計される。
パーキングブレーキが作動されるときには、ブレーキ作動力の、または、パーキングブレーキが解除されるときには、ブレーキ作動クリアランスの設定の正確さおよび信頼性を増加するために、制御装置(10)は、ブレーキの作動中に直流モータによって取りあげられた電流の時間に関する1次微分係数の形成によって、作動ポイントを決定する。
そのようなパーキングブレーキを動作するための対応する方法も記述される。
(もっと読む)
ブレーキ倍力制御装置
【課題】 マスタシリンダから供給されるブレーキ液を加圧してホイルシリンダへ供給可能な液圧供給源を備え、ブレーキ操作状態量に応じてホイルシリンダ圧を倍力制御する際、運転者の意思とは無関係なブレーキ液圧の変動発生を防止できるブレーキ倍力制御装置を提供すること。
【解決手段】 複数のホイルシリンダ圧設定値(目標到達圧Pwc(n))を設定するとともに、各ホイルシリンダ圧設定値に対応して、それぞれ固有の上限値(閾値Pu(n+1)=Pd(n+1))と下限値(閾値Pu(n-1)=Pd(n-1))を有する複数のブレーキ操作状態量(マスタシリンダ圧Pmc)の範囲を設定し、検出されたブレーキ操作状態量が属する上記範囲に対応するホイルシリンダ圧設定値にホイルシリンダ圧を制御することとした。
(もっと読む)
車両の駆動力制御装置
【課題】AYC(左右輪駆動力配分手段)及びASC(駆動力制御手段)を備える車両において、旋回走行時におけるAYCの駆動力配分制御及びASCの駆動力制御を適正化し、旋回性能を向上させることのできる車両の駆動力制御装置を提供すること。
【解決手段】ASC用ECU(36)においてアンダステア状態に対するASC制御が行われると、AYC用ECU(34)に駆動力移動量制限値が与えられ、当該AYC用ECUでは駆動力移動量を抑制した制御を行う。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】カーブ通過中の急激な加減速を防止してスムーズにカーブを通過できる新規な車両用走行制御装置および車両用走行制御方法を提供。
【解決手段】カーナビゲーションシステム20からのナビゲーション情報に基づいて算出された目標減速度と、ヨーレートセンサ22のヨーレートから目標減速度を算出された目標減速度とを比較して低い方の目標減速度を選択(セレクトロー)して選択した目標減速度に基づいて減速制御手段を制御すると共に、ヨーレート目標減速度の方が選択された場合には、その最小値を「0」とする。これによって、ナビゲーション情報に基づく減速制御が作動した後に、ヨーレートによる減速制御が作動した場合であっても急激な加減速の変化を防止できるため、スムーズにカーブを通過することができる。
(もっと読む)
101 - 120 / 139
[ Back to top ]