
Fターム[3D246JB10]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 上限値、下限値の設定 (139)
Fターム[3D246JB10]に分類される特許
121 - 139 / 139
車両用制御装置及び制御システム

【課題】車両を停止状態から走行状態へと移行させるに際し、走行方向とは逆方向へと車両が変位するおそれがあること。
【解決手段】図18(d)に一点鎖線にて示すようにユーザのブレーキ操作によって制動トルクを低減させる場合には、制動トルクと駆動トルクとの合計が、路面の勾配に起因した重力のうちの走行方向とは逆方向の成分と釣り合うトルク(勾配トルクTrg)に満たないために、車両が走行方向とは逆方向へと変位するおそれがある。そこで、車両の加速度がゼロ以上となるまで、駆動トルクと制動トルクとの和が勾配トルクTrgとなるように、制動力を操作する。
(もっと読む)
クラッチが自動車内で伝達するトルクのマッピングを設定する装置及び方法、並びにこのような装置を備える自動車の坂道発進アシストシステム
本発明は、車両運転時に、自動車のクラッチが伝達するトルクのマッピング(2)を、クラッチ制御部材(3)の位置に基づいて求める装置に関する。前記装置は、前記マッピング(2)を、前記クラッチ制御部材(3)の位置閾値に基づいて更新する手段(5)を含む。前記更新手段(5)は、前記閾値の値を、前記マッピング(2)に保存された前記制御部材(3)の前記位置の最小値及び最大値に基づいて、かつ前記閾値の現在値に基づいて変更する計算手段(7)を含む。  (もっと読む)
(もっと読む)
電気−空気圧制動システム及び電気−空気圧制動システムの制御方法

【課題】一方では通常作動において確実な制動圧力制御を保証し、他方では一層大きい制動力の要求がある場合急速な制動を可能にする電気−空気圧制動システム及び制動システムを提供する。
【解決手段】制動圧力制御装置3が、圧縮空気溜め2に接続される弁4、弁4に接続される圧縮空気導管の制動圧力pを測定しかつ圧力信号S1を出力する圧力センサ5、圧力信号S1及び制動要求信号S6を受入れかつ弁4を起動する制御装置6を持ち、 制御装置6又は中央制御装置8が、少なくとも制動要求信号S6又は目標制動信号S3から最大制動力要求を認識し、かつ圧力信号S1から圧縮空気溜め2の貯蔵圧力が弁4により設定される制動圧力pより高いことを認識する場合に、 制御装置6又は中央制御装置8が、最大制動モードを設定し、制御装置6が弁4を更に開く。
(もっと読む)
ブレーキ装置、ブレーキ制御装置およびブレーキ制御方法
【課題】液圧制御の減圧時にその目標液圧に確実に収束させることができ、特に目標液圧がゼロである場合にブレーキの引きずりを発生させないブレーキ制御技術を提供する。
【解決手段】ブレーキ装置においては、液圧制御においてその目標液圧に不感帯領域を設定している。そして、回生協調制御において液圧制御から回生制御へ切り替える際、残圧低減条件の成立により、目標液圧を本来収束させるべきゼロよりも低く設定する残圧低減制御が実行される。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】青信号時間が変動する場合であっても、危険走行領域を特定することができる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間などに基づいて、自車両が黄信号開始時点で交差点の手前に停止する停止条件及び黄信号の終了時点で交差点に進入する進入条件を算出する。車載装置は、青信号の延長又は短縮時間の上限値、進入条件及び停止条件に基づいて、危険走行状態を特定する。
(もっと読む)
車両用トラクション制御装置
【課題】駆動輪に過剰スリップが生じそうになったときに、動力源の駆動力制御および過剰スリップが生じそうになった駆動輪のブレーキ力を制御して過剰スリップの発生を防止するようにした車両用トラクション制御装置において、ブレーキトルク制御および駆動源トルク制御の干渉を回避しつつ、ブレーキトルクおよび駆動源トルクの制御量が適切に得られるようにする。
【解決手段】目標駆動輪トルク演算部32A,32Cが、目標駆動輪速度および駆動輪速度を比較して各駆動輪毎に目標駆動輪トルクを演算し、制御量配分決定部33が、その目標駆動輪トルクに基づいて動力源の出力トルクならびに各駆動輪用車輪ブレーキのブレーキトルクの配分を定めて動力源トルク制御量およびブレーキトルク制御量を決定し、動力源トルク制御量に基づいて駆動源の出力トルクを調整するとともにブレーキトルク制御量に基づいて駆動輪用車輪ブレーキのブレーキ力を調整する。
(もっと読む)
車両用の自動化されたパーキングブレーキ
【課題】車両を予め与えられた速度に減速させることができ、これまでより制御しやすい電気機械式パーキングブレーキを提供する。
【解決手段】車両用の自動化されたパーキングブレーキは、パーキングブレーキの操作のために、複数のブレーキアクチュエータ(4a、4b)および1つの操作エレメント(6)とを備え、ブレーキアクチュエータ(4a、4b)が制御装置(1、11)に接続され、制御装置(1、11)が、特定の走行状態において車輪毎のスリップ制御を実行可能である。制御装置(1、11)が、第1の車輪(13a)におけるスリップ制御において、第2の車輪(13b)のスリップ(λ2)が考慮されるよう設計されている。
(もっと読む)
走行支援装置および走行支援方法
【課題】ドライバーに与える違和感を低減した走行支援を行う。
【解決手段】制動制御手段、操舵制御手段、および、制動制御手段と操舵制御手段とを含む複合制御手段のそれぞれを算出対象として、この制御を実施した場合の回避限界時間を回避限界値として算出する。制御手段毎の回避限界値と、ドライバーの操作状態とに基づいて、障害物を回避するための制御手段を選択する。この選択では、ドライバー操作と対応する制御手段を優先的に選択する。
(もっと読む)
ブレーキ倍力制御装置
【課題】 運転者のブレーキペダル操作力により発生する圧力を精度よく検出し、ブレーキペダル操作力に応じたホイルシリンダ圧を高い精度で発生させるブレーキ倍力制御装置を提供すること。
【解決手段】 制動意図と目標制動力との差に基づいてゲートアウトバルブのコイルに通電する電流値を与えると共に、ホイルシリンダとゲートアウトバルブとの間に目標制動力以上の液圧を発生可能な液圧源を備えた。
(もっと読む)
車両制御装置
【課題】操舵系に生ずる振動の増大を抑制して良好な操舵フィーリングを実現することのできる車両制御装置を提供すること。
【解決手段】特定周波数抽出部51は、操舵系の状態を示す信号としてのピニオン角θpから、EPSアクチュエータ22を構成する減速機構における歯打ち音(ラトル音)の発生を助長する振動に対応する周波数成分を抽出し、その実効値をパワースペクトルSpとして出力する。そして、速度ECU7は、そのパワースペクトルSpが所定の閾値以上となった場合には、当該パワースペクトルSpを低減すべく、車速を制御、詳しくは、車速Vが、第1の所定速度から第2の所定速度までの範囲から外れるように制御する。
(もっと読む)
ブレーキホールド制御装置
【課題】ブレーキホールド制御装置において、アクセル開度センサの故障等の異常時に、運転者が予期しない車両の挙動変化を有効に防止することである。
【解決手段】車両の制動力を保持するブレーキホールド用電磁バルブを備えるブレーキアクチュエータ32と、アクセル開度を検出する制御用、異常検出用2個のアクセル開度センサ20,22と、2個のアクセル開度センサ20,22からの検出信号が入力されるブレーキECU24とを備える。ブレーキECU24は、ブレーキホールド解除用アクセル開度条件を含む所定のブレーキホールド解除条件が満たされた場合に制動力を解除させる。ブレーキホールド解除用アクセル開度条件は、2個のアクセル開度センサ20,22の両方からの検出信号に対応するアクセル開度AP1,AP2のいずれもが所定の開度よりも大きいこととする。
(もっと読む)
電圧回路
【課題】 電圧制限回路を省略しつつ、電圧が過度に昇圧されることを回避した電圧回路を提供する。
【解決手段】 電源と、入力された前記電源の昇圧を行う昇電圧回路とを備えた電圧回路において、前記昇電圧回路は、昇圧電圧をあらかじめ設定された上限値以下となるよう制限する昇圧制限手段を備えることとした。
(もっと読む)
車両の運転支援装置
【課題】現在の車両挙動のみならず、今後予想される車両挙動をも考慮して、直進状態からカーブ走行に至るまで、走行路の過渡状態における走行状況においても、車両の加減速度を適切に抑制し、先行車追従に際して円滑で違和感の無い快適な制御を可能とする。
【解決手段】追従走行制御の追従加減速制御において、自車速V0と自車両1に対する先行車の相対位置とに基づき自車両1が先行車に追従するのに必要な目標ヨーレートγtを演算する。また、目標ヨーレートγtに応じて第1の制限値Lmγ1を演算し、目標ヨーレートγtの単位時間あたりの変化量(γt−γtold)/Δtに応じて第2の制限値Lmγ2を演算し、目標ヨーレートγtと実ヨーレートγrとの偏差Δγ(=γt−γr)に応じて第3の制限値Lmγ3を演算し、これら第1,第2,第3の制限値の絶対値の最小のものを制限値Lmに設定して、目標加減速度aを制限値Lmで制限する。
(もっと読む)
調整量としてエンジン回転数を用いた車両における駆動輪の駆動スリップ制御方法及びその装置
本発明は車両の駆動輪の駆動スリップを制御するための方法に関している。この方法によれば、車両の駆動エンジン(12)のための調整量が、現下の車輪速度の検出値と車輪目標速度の算出値に基づいて形成される。本発明は、この調整量を駆動エンジン(12)の回転数に対する上方の限界値によって形成している。  (もっと読む)
(もっと読む)
自動車に用いられるブレーキシステムを運転するための方法
電気的に制御可能なハイドロリック弁(V1〜V8)を備えた、自動車に用いられるブレーキシステム(1)を運転するための方法が記載される。ハイドロリック弁(V1〜V8)のコイルが、ブレーキシステム(1)のハイドロリックシステムに位置するハイドロリック流体を温めるために、ハイドロリック弁(V1〜V8)の無通電の切換状態を変化させる電流で少なくとも段階的に通電される。本発明によれば、ハイドロリック流体が、このハイドロリック流体の温め段階を招くハイドロリック流体温度に関連した、第1の加熱段階と、この第1の加熱段階に続く第2の加熱段階とから成る加熱分布を介して温められる。この場合、コイルは、第1の加熱段階の間、この第1の加熱段階の終了時のコイル温度が、それぞれ予め規定されたコイル温度値に相当しているように通電される。このコイル温度値は、第2の加熱段階の間、コイルの通電によって少なくとも近似的に保持される。 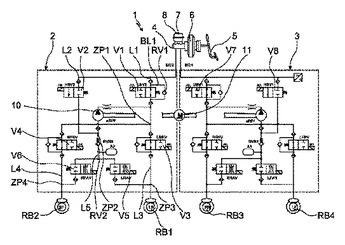 (もっと読む)
(もっと読む)
連続する制動の認知により緊急制動を検出する方法
本発明は、制動システム(10)に導入可能なブレーキサーボユニットを備える自動車の制動制御方法に関し、この制動システム(10)は、真空ブレーキブースター(18)及び油圧回路(A、B)に接続する油圧マスターシリンダーであって、この車両の車輪に装備される車輪ブレーキ(12A、14A、12B、14B)に供給する油圧マスターシリンダー、車輪横滑り防止機能を有するABS油圧ユニット(22A、22B)、油圧ユニット(22A、22B)によって補助される緊急制動を実行する電子手段(24)を備える。この方法は、緊急制動操作を実行するために一定の時間内に反復を検出すること、連続して反復する場合に緊急制動を実行するための条件を適用することを特徴とする。 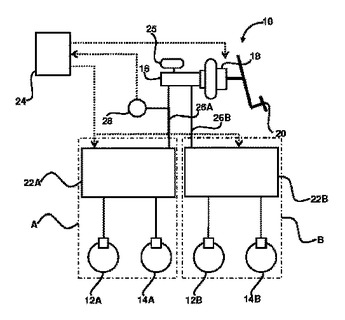 (もっと読む)
(もっと読む)
自動二輪車のブレーキ圧力調節の為の方法とブレーキシステム
アンチロック機能およびインテグラル制動機能を備えた自動二輪車のブレーキシステムにおいてブレーキ圧力を調節するための方法およびブレーキシステムであって、ブレーキスリップ制御用として前輪のブレーキ回路(1)および後輪のブレーキ回路(2)のそれぞれにインレットバルブおよびアウトレットバルブ(9、10)が設けられ、この場合、ポンプ(15)と、少なくとも1つのブレーキ回路(1、2)におけるそれぞれ少なくとも1つの分離バルブおよび切換バルブ(11、18)とを用いるインテグラル制動機能によって、自動二輪車乗員が操作するブレーキ回路以外のブレーキ回路において能動的な圧力形成が行われ、かつ、この場合、インテグラル制動機能によって始動されるブレーキ回路(1、2)において、ブレーキスリップ制御の間、ブレーキ圧力調節が切換バルブ(18)および/または分離バルブ(11)によって制御または調整される、方法およびブレーキシステム。 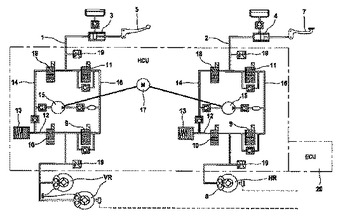 (もっと読む)
(もっと読む)
推進式機械用の勾配制限されるリタード制御
電気駆動システム及び機械式ブレーキシステムを有する推進式機械内のパワーを散逸させるための方法が提供される。機械の傾斜が決定される(110a)。機械の速度が決定される(135)。決定された傾斜及び速度に基づきリタード要件が決定される(155)。リタード要件の第1の部分は、電気駆動システムによって満たされるように割り当てられ、第1の部分は、電気駆動システムのリタード容量以下である(170)。リタード要件が電気駆動システムのリタード容量よりも大きい場合(160)、リタード要件の第2の部分は、機械式ブレーキシステムによって満たされるように割り当てられる(175)。  (もっと読む)
(もっと読む)
電子的に制御可能なディファレンシャルロック機構のロックレベルを制御するための方法及び装置
この発明は、車両の駆動車軸における電子的に制御可能なディファレンシャルロック機構のロックレベルを制御するための方法に関する。この発明による方法は、駆動車軸の駆動輪が走行動特性コントローラによって制御される形で制動されているか否かを調査することと、駆動車軸の駆動輪が走行動特性コントローラによって制御される形で制動されていることが確認された場合に、ディファレンシャルロック機構をゼロのロックレベルに設定することとを特徴とする。走行動特性コントローラがブレーキ介入を行っていない時に車両がオーバーステアする場合、有利には、ゼロと異なるロックレベルを設定する。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
121 - 139 / 139
[ Back to top ]