
Fターム[3D246JB10]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 上限値、下限値の設定 (139)
Fターム[3D246JB10]に分類される特許
81 - 100 / 139
ブレーキ制御装置
【課題】ストロークセンサに異常が発生したときの制動要求判定への影響を抑制する。
【解決手段】ブレーキ制御装置10は、ストロークセンサ46と、ストップランプスイッチ70と、ストロークセンサ46の異常を判定し、異常であると判定された場合にストップランプスイッチ70の出力に基づいて運転者の制動要求が発生したか否かを判定するブレーキECU200と、を備える。ブレーキECU200は、複数のストロークセンサ46に異常があるか否かを判定し、異常があると判定した場合にはストップランプスイッチ70からの入力を併用して制動要求が発生したか否かを判定してもよい。
(もっと読む)
車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置

【課題】運転者が、適切なブレーキ操作を行っているか否かを判断することができ、燃費運転を訴求することが可能な車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置を提供する。
【解決手段】ブレーキペダルの踏込み量に基づいて要求制動力を算出するとともに、モータが出力可能な最大回生制動力、及び、バッテリが入力可能な最大回生制動力のうち、少なくとも一方の最大回生制動力を算出する。そして、要求制動力及び最大回生制動力に基づいてブレーキ操作の評価値を算出し、この評価値に応じた情報を報知する。この際、要求制動力が最大回生制動力を超えている場合、要求制動力が最大回生制動力を超えていない場合と比較して、ブレーキ操作の評価値を低く算出する。
(もっと読む)
車両用加減速制御装置及びその方法
【課題】ナビゲーションシステムによる経路誘導の終了によりカーブ手前で減速制御が終了する場合でも、該カーブに対して有効に減速させる。
【解決手段】車両用加減速制御装置は、ナビゲーション装置14による車両の経路誘導時に、その誘導経路を基に、車両前方のカーブを検出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が検出したカーブに対応して車両を減速制御する目標車速演算部42等と、車両からみてナビゲーション装置14の経路誘導終了地点よりも遠方に制御対象のカーブが存在するときには、減速制御の制御内容を、該経路誘導終了地点に対応したものに変更する目標車速指令値演算部45と、を備える。
(もっと読む)
液圧式の車両ブレーキ装置のブレーキ操作を制御する方法並びに電気機械式のブレーキ力倍力装置
本発明は、ハイブリッド車両の液圧式の車両ブレーキ装置(1)のブレーキ操作を制御する方法であって、ハイブリッド車両は電動モータ(12)のジェネレータモードにより制動可能である。電動モータ(12)のブレーキ作用を補償するために本発明は、電動モータ(12)によって制動される車両ホイールのホイールブレーキ(4)内のホイールブレーキ圧をブレーキ圧減圧弁(8)の開放により減じるようになっている。  (もっと読む)
(もっと読む)
車両制動装置
【課題】路面状況に応じた制動に係わる制御を最適に実行することができる車両制動装置を提供すること。
【解決手段】本発明による車両制動装置1は、スリップ率が目標スリップ率よりも大きい場合に車輪のロックを抑制するロック抑制手段7bと、車体速度が許可最低車体速度以上であり車体減速度が開始許可減速度以上である場合に車両のピッチングを抑制するピッチング抑制手段7cと、車両が砂地路を走行しているか否かを判定する砂地路判定手段7dと、砂地路判定手段7dにより車両が砂地路を走行していると判定される場合に、目標スリップ率を大きくするとともに、許可最低車体速度及び開始許可減速度を小さくする変更手段7eを備えることを特徴とする。
(もっと読む)
車両の回生制御装置
【課題】車両の減速時に、車両走行用のモータを発電機として動作させて、車両の運動エネルギーを回生する場合に、モータの共振周波数帯の運転領域での回生音の突出による減速時の回生音の変動を抑制する。
【解決手段】共振周波数帯の運転領域A1、A2、A3にて、回生トルクを減少させ、非共振周波数帯の運転領域B1、B2にて、回生トルクを増大させる。具体的には、車速(モータ回転周波数)に応じて回生トルクに対する補正値若しくは補正後の回生トルクを定めたテーブルを用い、このテーブルを参照して、車速に応じた回生トルク指令を行う。
(もっと読む)
ブレーキ制御装置
【課題】コストを抑制しつつ、滑らかなブレーキ制御を実現する。
【解決手段】制御周期が異なる複数のモジュールを備えるブレーキ制御装置において、第1モジュールは、第1制御周期で第1制御目標値を出力する。第2モジュールは、第1モジュールから出力された第1制御目標値にもとづいて第2制御目標値を第1制御周期より短い第2制御周期で演算する。目標変化値算出手段は、第1制御目標値が更新された場合、第1制御目標値にもとづいて新たな目標変化値を算出し、第1制御目標値が更新されなかった場合、前回算出された目標変化値を新たな目標変化値とする。第2制御目標値算出手段は、第1制御周期と第2制御周期との基本周期比をもとに調整された調整周期比によって新たな目標変化値を補正し、補正された目標変化値にもとづいて新たな第2制御目標値を算出する。
(もっと読む)
車両制御装置とブレーキ電子制御装置と電動パワーステアリング装置
【課題】車両が搭載するバッテリの消耗を低減した車両制御装置等を実現することを目的とする。
【解決手段】車両に搭載されたバッテリ800を用いて車両を電気的に制御する車両制御装置100において、検知した車両状態に基づき車両の制御の迅速性が必要ではないと判断される場合に、バッテリ800の電流消費を低減するように、制御の通電量を抑制する車両制御装置100とする。好ましくはホイールシリンダを増圧する増圧弁を通電制御して要求制動力に対応する液圧を供給するブレーキ電子制御装置においては、検知した車両の状態に基づき要求制動の迅速性が必要ではないと判断される場合に、増圧弁への通電量を抑制するブレーキ電子制御装置とする。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
衝突の場合における車両ブレーキ装置の調節方法および装置
車両ブレーキ装置の調節方法において、衝突の場合に自動的にブレーキ力が形成される。この場合、車両における衝突位置が特定され且つ前記ブレーキ力の上昇が衝突位置の関数として実行される。 (もっと読む)
車両用制動力制御装置
【課題】 ドライバのブレーキペダル踏み戻し操作中に自動制動が作動したときの前後加速度の変動を抑制して横加速度へと滑らかにつなげることができる車両用制動力制御装置および車両用制動力制御方法を提供する。
【解決手段】 最終目標減速度設定部27は、ドライバのブレーキペダル踏み戻し操作中にCBAが作動した場合、ドライバ要求減速度xg_dr*が制御用減速度xg0*よりも大きいときには、最終目標減速度xg*の減少率をドライバ要求減速度xg_dr*よりも小さくする。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
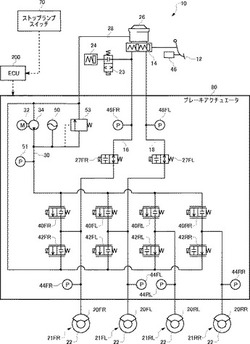
車両発進補助装置
【課題】 スムーズな発進を行うことができる車両発進補助装置を提供する。
【解決手段】 ドライバのブレーキペダルBPの操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCU32と、車両に設けられた前輪FL,FRに駆動力を作用させるエンジン39と、ブレーキCU32によりホイルシリンダ液圧を減圧する際に駆動源の駆動力または回転数が所定の上下限値の間に収まるように制御する発進補助制御部41と、を備える。
(もっと読む)
制動力保持制御装置
【課題】発進補助制御を行う際に、ドライバに板感を与えることを防止してブレーキフィーリングの向上を図る。
【解決手段】発進補助制御処理において、発進補助制御の開始条件を2つに分け、車両停止時よりもブレーキペダルBPが踏み込まれてマスタシリンダ圧が上昇したときに発進補助制御の実行許可を出し、その後、ブレーキペダルBPが戻されたことが確認されると発進補助制御の実行開始する。このように、ブレーキペダルBPが戻されたときに初めて発進補助制御の実行開始としているため、発進補助制御の実行により電磁開閉弁SMCFおよび電磁開閉弁SRECが遮断状態にされたとしても、その後にブレーキペダルBPが踏み込まれることがない。このため、ブレーキペダルBPを踏み込んだときに発進補助制御を実行する際のような板感をドライバに与えないようにすることができる。
(もっと読む)
車両用速度制御システム
本発明は、予め設定された目標速度域内で燃費を指向しながら車速を制御するための、燃費指向の速度制御モードを起動するための操作ユニットと、前記燃費指向の速度制御が起動状態にあるときに、予め設定された最大エネルギ消費値に配慮しながら、前記予め設定された目標速度域内で車速を制御するようになっている、制御ユニットとを備えた、車両用の速度制御システムに関する。その際に車速は、前記予め設定された目標速度域内に位置する車速に調整することが可能である限りは、前記予め設定された最大エネルギ消費値を上回ることがないように、前記予め設定された最大エネルギ消費値に配慮しながら制御される。 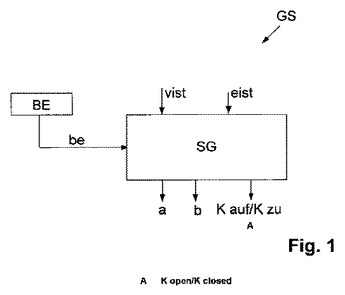 (もっと読む)
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態の速やかな解消を補助できる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態にある場合には、前輪の車輪速度VWFを調整すべくアクセル操作を運転手が行うことを契機にグリップ力回復制御が実行される。すなわち、転舵輪である前輪は、その車輪速度VWFが運転手によって調整されつつ、その転舵角σの絶対値が一時的に小さくなるように調整される(第3タイミングt3)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第4タイミングt4)。
(もっと読む)
車両用減速制御装置及びその方法
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、ナビゲーション装置が地図上に出力する道路上の車両位置と、GPS情報から得た車両位置との該車両の走行方向と直交する方向におけるY方向距離LYを得て(ステップS22)、そのY方向距離LYに応じて許容横加速度Yglmitを大きくする補正をする(ステップS28)。これにより、車両用減速制御装置は、減速制御のための目標減速度を小さくする。
(もっと読む)
電動ブレーキ装置
【課題】電動ブレーキ装置において、バッテリー電圧の低下によるエンストが起こることを防止しつつ、要求した制動力まで到達できるようにする。
【解決手段】バッテリー電圧の低下に応じて要求制動トルクの変化勾配にガードを掛ける勾配ガードを設定する。これにより、バッテリー電圧の低下時に、要求制動トルクの変化勾配にガードを掛けることができる。したがって、バッテリー電圧の低下時にアクチュエータ3での消費電力を低減することが可能となり、バッテリー電圧の低下によるエンストが起こることを防止しつつ、要求した制動力まで到達できるようにすることが可能となる。
(もっと読む)
アキュムレータ制御装置
【課題】ベローズを備えるアキュムレータにおいて、ベローズとストッパとの当接を防止する。
【解決手段】ベローズ64は、アキュムレータ50のシェル58内部の底面に一端が固定され、軸方向に伸縮自在にされている。ベローズキャップ70は、ベローズ64の他端に取り付けられ、アキュムレータのシェル内を油室90とガス室72とに分離する。ストッパ88は、ベローズキャップ70と当接することでベローズの収縮量を規制する。上限圧測定手段は、ベローズキャップがストッパと当接するときのアキュムレータ圧である上限圧を測定する。モータ制御手段は、アキュムレータ圧が上限圧を超えないように、アキュムレータに蓄圧するポンプを駆動するモータの動作を制御する。
(もっと読む)
運転支援装置
【課題】特定の進路にのみ進行可能な時間を有する交差点にて停止支援を行う場合において、停止支援による煩わしさを低減すると共に、車両を停止線で確実に停止可能とする。
【解決手段】運転支援装置1は、警報装置4、ブレーキアシスト装置5及びECU6を備えている。この運転支援装置1では、信号機に矢灯器が設けられている交差点で警報出力を行う場合、右折行動待機位置に停止可能な第1警報タイミングを警報条件として設定する。つまり、警報出力の開始タイミングを、停止線に停止可能な第2警報タイミングよりも遅らせている。よって、矢灯器方路に進行する自車両10においては停止支援による煩わしさが低減される。加えて、ブレーキアシスト装置5を備えていることから、停止線で停止する自車両10は、BAによって停止線で確実に停止可能となる。
(もっと読む)
81 - 100 / 139
[ Back to top ]