
Fターム[3D246JB43]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 時間に基づいて制御するもの (260)
Fターム[3D246JB43]に分類される特許
201 - 220 / 260
車両走行制御装置

【課題】 ドライバの乗り心地感の低下を招くことなく、先行車両に対する追従走行制御を行うことができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、先行車両との車間時間が目標車間時間よりも短い場合に、制御ブレーキをかける制御を行う。車間制御ECU1では、制御ブレーキがかけられる制御ブレーキ頻度を算出している。この制御ブレーキ頻度が所定のしきい値を超えた場合には、目標車間時間を長く調整する。
(もっと読む)
湿式マルチディスクブレーキの操作方法および湿式マルチディスクブレーキ
本発明は、半径方向に延在する固定ディスクと回転ディスク(6、7)が、ブレーキング時に、空隙を除去しつつ互いに押圧される、冷却オイルによって湿式回転を行う、特に路上走行車両のためのマルチディスクブレーキを操作するための方法に関する。この方法は、ブレーキを弛めた後に、互いに組み込まれたディスク(6、7)が互いに離間され、、オイルを含まないかまたはオイルを実質的に含まない空隙が形成され、かつブレーキングに先立つディスク(6、7)の送りによって空隙が最小化されるように形成されている。 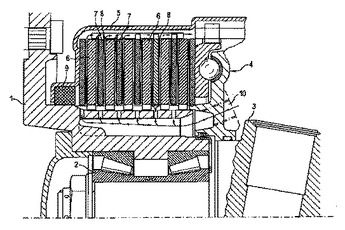 (もっと読む)
(もっと読む)
障害物回避支援装置

【課題】車両の進路上に検出した障害物との接触の危険性が高いときに、障害物を操舵によって回避することができる可能性を向上させる障害物回避支援装置を提供する。
【解決手段】障害物検出手段101は、車両の進路上にある障害物を検出する。判断手段102は、障害物検出手段101が検出した障害物の位置に応じて、車両の前輪と後輪との制動力の配分を補正するか否かを判断する。制動力配分補正手段103は、判断手段102が車輪の前輪と後輪との制動力の配分を補正すると判断した場合、制動力の配分を前輪から後輪よりに補正する。
(もっと読む)
ブレーキ装置
【課題】異常判定の精度が向上されたブレーキ装置を提供する。
【解決手段】ブレーキ装置は、運転者のブレーキ操作に応じて発生される作動液圧の作用により車輪と共に回転する回転部材に摩擦部材を押圧することで車輪に制動力を付与する。このブレーキ装置は、所定の異常判定条件が成立した場合に作動液圧の応答異常を検出する制御部を備える。制御部は、ブレーキ操作開始前の回転部材と摩擦部材との間のクリアランスが基準を超えた状態であることが想定される場合には異常判定条件を緩和する。
(もっと読む)
ブレーキ制御装置
【課題】回生協調制御において運転者への違和感なく液圧制動力の併用へとスムーズに遷移させる。
【解決手段】ブレーキ制御装置は、回生制動力に液圧制動力を併用して要求制動力を発生させる。この装置は、目標圧と実液圧との偏差が許容範囲外にある場合には偏差を該許容範囲に収めるように実液圧を制御し、偏差が許容範囲内にある場合には実液圧を保持することにより液圧制動力を制御する液圧ブレーキユニットを備える。液圧ブレーキユニットは、液圧制動力による補填が必要となるタイミングを検出し、該タイミングにおいて目標圧を嵩上げする制御部を備える。
(もっと読む)
ソレノイドバルブを制御する方法
本発明は液圧システム内のソレノイドバルブ、とりわけ比例ソレノイドバルブ(1)を制御する方法に関する。本発明は、液圧システムのモデルを形成し、制御サイクルを定め、制御サイクル終了時における液圧システム内の圧力とソレノイドバルブのコイルに印加されるコイル電圧を、制御サイクル開始時の値と、液圧システムの構成要素の物理的パラメータと、液圧流体の温度とに基づいて推定する。  (もっと読む)
(もっと読む)
衝突被害軽減装置
【課題】車両運転者の運転特性に応じてブレーキの作動タイミングを切り替え、安全性を向上させる。
【解決手段】車間距離レーダなどにより測定された車間距離L並びに相対速度Vrに基づいて、先行車両に衝突するまでの衝突時間tcを演算する(S1及びS2)。衝突時間tcは、所定の閾値tnと比較され、該閾値tn以下となったときにブレーキが作動する(S8)。そして、衝突時間tcが所定時間β連続して所定値α以上となったときに、所定規則に則って閾値tnを初期値tdから増加させる一方(S3〜S6)、衝突時間tcが所定値α未満となったときに、閾値を初期値に戻す(S7)。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御装置と制動力制御装置とを協働させる構成において、動荷重に対する駆動力配分制御装置の耐久性を維持できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。また、この車両運動制御システム1では、駆動力配分制御装置2と制動力制御装置3とが協働して車両運動制御を行う。また、車両10の旋回時にて駆動輪11RR、11RLへの駆動力が減少したときに、駆動力配分制御装置2が駆動力配分制御を停止すると共に、制動力制御装置3が制動力制御を行うことにより車両運動制御が行われる。
(もっと読む)
車線逸脱防止装置及び車線逸脱防止方法
【課題】車両の走行車線に対する逸脱傾向の度合いが小さくても、車両の逸脱をより防止可能とする。
【解決手段】走行車線に対する車両の逸脱傾向の度合いに応じたヨーモーメントM1を算出し、その算出したヨーモーメントM1に応じた目標ヨーモーメントMsを車両に付与する。その際に、算出したヨーモーメントM1が最小目標ヨーモーメントMmin以下の場合には、時間と共に増加する最小制御ヨーモーメントMsmを使用する。この最小制御ヨーモーメントMsmの初期値Msm0は、最小目標ヨーモーメントMminよりも小さい値である。
(もっと読む)
ブレーキ制御装置
【課題】制動力の失陥を精度良く検出することができるブレーキ制御装置を提供すること。
【解決手段】失陥検査対象車輪に付与されるW/C圧を、S109〜S119で設定した駆動時間及び駆動パターンに従って、減圧し又は保持する(S121)。そして、その間に、その車輪の車輪速度に加速側の変化が見られない場合(S123:No)、その車輪において制動力の失陥が生じていると判断する(S125)。これにより、失陥検査対象の車輪速度の変動から制動力の失陥が検出されるので、2つの車輪の車輪速度を比較する場合と比較して車輪速度の誤差の影響を排除することができ、制動力の失陥を精度良く検出することができる。
(もっと読む)
車両の制動装置
【課題】簡単な構成によって、障害物の存在に起因して制動力を発生させた後にその障害物との衝突の可能性がまだある場合、制動力の発生を中断または中止してしまうことを確実に防止することができる制動装置の提供。
【解決手段】ECU5は、物体検出センサ4が検知した物体が車両1と衝突する可能性がある障害物であると判定したとき、物体検出センサ4が検出した位置情報及び相対速度に基づいて、ブレーキアクチュエータ6及びディスクブレーキによる制動力の発生を開始させる。ECU5は、ブレーキアクチュエータ6及びディスクブレーキが制動力を発生しているとき、物体検出センサ4が検出する位置情報に基づいて物体が車両1の進行方向前方の所定範囲に存在するか否かを判定し、物体が所定範囲に存在すると判定した場合、ブレーキアクチュエータ6及びディスクブレーキによる制動力の発生を継続させる。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作の解除後に、車両が急加速することを抑制することができる車両走行制御装置を提供すること。
【解決手段】運転者の制動操作に基づいて油圧による制動トルクを発生するブレーキ装置を有する車両の車速を予め設定された目標車速となるように、エンジンが発生する駆動トルクを制御することで自動走行制御を行う車両走行制御装置において、エンジンは、運転者の加速操作に基づいても駆動トルクを発生するものであり、自動走行制御は、運転者による制動操作の解除に基づいて、運転者による加速操作に拘わらず行われる。運転者による制動操作が解除された場合(ステップST4)、運転者による制動操作の解除から所定時間T(ステップST6)は、エンジンが発生する駆動トルクを車速Vを目標車速Voとすることができる駆動トルクよりも小さく制限されるように、今回の目標駆動トルクETo(n)を算出する(ステップST7,ST8)。
(もっと読む)
車両挙動制御装置
【課題】 ヨーレイトセンサの失陥時等における望ましくない車両挙動を抑制した車両挙動制御装置を提供する。
【解決手段】 制動継続時間Tbが第1故障判定閾値Tthに達することで、ステップS13の判定がYesになると、VSA−ECU6は、ステップS14で初期値1.0の制動ゲインGbから所定の漸減値ΔGbを減じた後、ステップS16で制動ゲインGbが0となったか否かを判定する。ステップS13の判定がYesの状態が所定時間続き、ステップS15の判定がYesになると、VSA−ECU6は、ステップS16で制動禁止フラグFpbを1とした後、ステップS17で失陥時処理を実行して制動禁止判定制御を終了する。
(もっと読む)
不充分な通過可能高さ又は不充分な通過可能幅を持つ障害物を警告する方法及び装置
【課題】小さすぎる通過可能高さ又は小さすぎる通過可能幅を適時に運転者に警告する。
【解決手段】通過にとって重要な障害物のデータを求めるため、前にある頭上障害物又は前にある側方障害物及びそれぞれの車道表面が走査され、求められた障害物の通過にとって重要なデータが、車両の通過にとって重要なデータと比較され、車両の通過にとって重要なデータが、障害物の通過にとって重要なデータを上回るか又はそれと同じである場合、警告信号が運転者に与えられる。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段30と、拘束条件演算手段での拘束条件を満たしている状態で、少なくとも速度の分散の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段30とを備えることを特徴とする。
(もっと読む)
アンチスキッド制御装置および自動ブレーキ制御装置
【課題】増圧制御弁の個体差によるW/C圧の昇圧性能ばらつきに起因して左右前輪のW/C圧の差圧を一定範囲に抑えることができなくなることを防止し、スピンを防止する。
【解決手段】高μ路側の前輪FR、FLと対応する増圧制御弁17、37にて第1差圧Plowを第1時間Tlow継続し、第2差圧Phighを第2時間Thigh継続することを繰り返すことで、高μ路側の車輪のW/C圧を緩増圧する。これにより、W/C圧の昇圧性能のばらつきを抑制することができ、左右前輪FR、FLのW/C圧の差圧を一定範囲に抑えることが可能になる。したがって、車両に加わるヨートルクを抑制でき、スピンを防止することが可能になる。
(もっと読む)
ブレーキ液圧制御装置および自動二輪車のブレーキ液圧制御装置
【課題】ブレーキ液圧制御装置において、早期に後輪の接地荷重の低下を判断する。
【解決手段】ブレーキ液圧制御装置は、前輪および後輪ABS制御が同時に実行されている場合、後輪ABS制御手段による後輪増圧制御中における後輪ホイールシリンダ圧の状態に基づいて後輪の接地荷重低下を予測し(例えば、後輪減圧制御の開始時点(時刻t4)の後輪ホイールシリンダ圧が第1所定値以上となった場合に、前記後輪が接地荷重低下となると予測する。後輪の接地荷重低下が予測された場合(時刻t4)、前輪減圧制御の開始判定に使用する前輪減圧開始閾値kVfを通常時に使用する値kV1より小さい値kV2に変更することにより、前輪ABS制御手段による後輪接地荷重低下を予測した時点後の前輪増圧制御の増圧量を前記予測した時点前の前輪増圧制御の増圧量に比べて低減するように補正する。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】自動走行車速VAが自動走行解除車速VX1付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、自動走行車速VAの設定時に、前記両判定が肯定の場合に、自動走行解除車速VX1が所定時間Tc無効にされる。
(もっと読む)
アンチスキッド制御装置
【課題】アクセルセンサを備えなくてもアクセルペダルとブレーキペダルの両踏み状態を検出できるようする。
【解決手段】ABS制御中に、推定車体速度と後輪MAX輪の車輪速度との差が誤差許容値A以上の状態で、かつ、減圧モードが設定されているという状態となり、さらに、この状態が続けば両踏み状態と判定する。これにより、アクセルセンサを備えなくてもアクセルペダルとブレーキペダルの両踏み状態を検出できる。
(もっと読む)
201 - 220 / 260
[ Back to top ]