
Fターム[3D246JB43]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 時間に基づいて制御するもの (260)
Fターム[3D246JB43]に分類される特許
161 - 180 / 260
液体量推定装置及び車両の運動支援装置
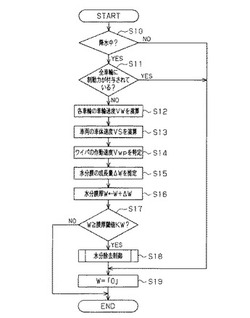
【課題】第1制動部材と第2制動部材との間に存在する液体の液体量を好適に推定できる液体量推定装置及び車両の運動支援装置を提供する。
【解決手段】車両には、車輪と共に回動するブレーキロータと、該ブレーキロータに摺接可能なブレーキパッドとが搭載されている。そして、ECUは、降水時に、車両の車体速度VSを演算し(ステップS13)、ワイパの作動速度Vwpを特定する(ステップS14)。続いて、ECUは、車体速度VS及び作動速度Vwpに応じて、ブレーキロータに付着する水分膜の所定周期での成長量ΔWを推定し(ステップS15)、所定周期毎の成長量ΔWを積算して水分膜厚Wを求める(ステップS16)。
(もっと読む)
車両用速度制御システム
本発明は、予め設定された目標速度域内で燃費を指向しながら車速を制御するための、燃費指向の速度制御モードを起動するための操作ユニットと、前記燃費指向の速度制御が起動状態にあるときに、予め設定された最大エネルギ消費値に配慮しながら、前記予め設定された目標速度域内で車速を制御するようになっている、制御ユニットとを備えた、車両用の速度制御システムに関する。その際に車速は、前記予め設定された目標速度域内に位置する車速に調整することが可能である限りは、前記予め設定された最大エネルギ消費値を上回ることがないように、前記予め設定された最大エネルギ消費値に配慮しながら制御される。 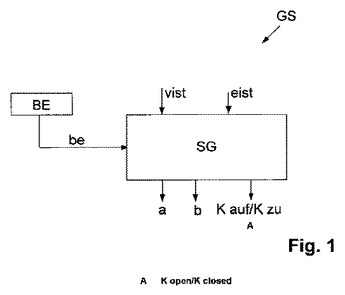 (もっと読む)
(もっと読む)
電磁弁制御装置

【課題】電磁弁で発生する発熱量の増加を抑制しつつ、作動状態から不必要に非作動状態になった電磁弁を速やかに作動状態に復帰させることができる電磁弁制御装置を提供する
【解決手段】ECUは、作動状態にある電磁弁の電磁コイルに対して保持電流Ihldを供給し、電磁弁の作動状態を維持させる。この状態で外部からの外乱によって電磁弁が不必要に作動状態から非作動状態に切り替った又は切り替りつつある場合には、電磁コイルにおける電流値IRが変動する(第3タイミングt3)。この際、ECUは、電磁コイルにおける電流値IRの変動から電磁弁が不必要に作動状態から非作動状態に切り替った又は切り替りつつあると判定し、電磁コイルに対して作動電流Istを供給させ、その後、電磁コイルに対して保持電流Ihldを供給させる(第4タイミングt4)。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、走行車線に対する自車両の現在横位置Xeを検出し(ステップS6)、この現在横位置Xeが側方物体に近いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、現在横位置Xeが側方物体に近づくほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS8)。
(もっと読む)
車両用安全制御装置
【課題】自動制動制御による自動ブレーキを安全に解除することが可能な車両用安全制御装置を提供する。
【解決手段】車両用安全制御装置では、安全制御処理により自動ブレーキ(自動介入制動)が作動すると制動制御処理が起動され、衝突予測時間Tcがゼロとなる時点の前後一定期間に検出した加速度(衝突加速度)αcを取得し(S210)、少なくとも自動介入制動により車両に生じる加速度を上回るように予め設定された衝突閾値αaを用いて閾値判定を行う(S220)。そして、衝突加速度αcが衝突閾値αa以上である場合(S220;YES)、自動介入制動を保持させ(S230)、衝突加速度αcが衝突閾値αa未満である場合(S220;NO)、自動介入制動を解除させる(S250)。なお、自動介入制動の解除タイミングは、衝突加速度αc等に応じて設定(S240)した加速度勾配に従う。
(もっと読む)
電気ブレーキを備えた乗物用ブレーキシステムにおける保護方法
【課題】電気モータの過熱の危険性を低減する。
【解決手段】本発明は、少なくとも1つの電気機械式アクチュエータを備えた少なくとも1つのブレーキを具備し、アクチュエータが、電気モータにより作動されてブレーキの摩擦要素に選択的に力を印加する押圧子を具備し、乗物の操縦者からの要求時に、ブレーキ命令101に応答して押圧子が電気モータにより作動されブレーキ力を摩擦要素に選択的に印加する制御モードか、又はモータからの駆動力なしに押圧子が摩擦要素にパーキング力を及ぼす位置にロックされるパーキングモードにおいて作動する乗物用ブレーキシステムを過熱から保護する方法に関し、本発明によれば方法は、乗物が静止している間、ブレーキシステムが制御モードにある間、及び押圧子が摩擦要素に力を印加するよう制御されている間に、操縦者の介入なくして自動的に制御モードからパーキングモードに切り換える段階を含む。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】自車両側方の障害物の存在に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
制動力保持制御装置
【課題】発進補助制御を実行させる意思が無いにもかかわらず誤って発進補助制御が実行されることを防止する。
【解決手段】発進補助制御を実行する際に、ブレーキペダルが速く踏み込まれる速踏み状態であるか否かを判定し、速踏み状態のときに発進補助制御の実行許可条件を満たせば発進補助制御の実行許可の判定を行う。これにより、ドライバが発進補助制御を実行しようとする意思が無いにもかかわらず発進補助制御を実行してしまうことを防止できる。したがって、発進補助制御を実行させる意思が無いにもかかわらず誤って発進補助制御が実行されることを防止できる。
(もっと読む)
坂の上で発進するためのアシスト装置を備える自動車のブレーキを解除する方法、そのようなアシスト装置、および、それを備える自動車
自動車のブレーキを解除するこの方法は、以下のステップ、すなわち、自動車発進コマンドが、その自動車を静止時に停止させる位置での自動車ブレーキの手動印加が終了した後に起こらない場合には、アシスト装置が、自動車を一般に所定のゼロでない速度状態および加速状態へ向かう傾向があるそれ自体の重量下で移動させるようになっている適した制御方式にしたがってブレーキを漸進的に解除し、その後、前記所定の状態に達したと見なされると、アシスト装置がブレーキの解除を停止するステップを備える。  (もっと読む)
(もっと読む)
車両運動制御システム
【課題】駆動力配分制御装置と制動力制御装置とを協働させる構成において、動荷重に対する駆動力配分制御装置の耐久性を維持できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、左右の駆動輪11RR、11RLに駆動力を付与すると共に左右の駆動輪11RR、11RLへの駆動力配分を制御できる駆動力配分制御装置2と、各駆動輪11RR、11RLの制動力を独立して制御できる制動力制御装置3とを備える。この車両運動制御システム1では、車両10がリバースステア状態となることが予測されるときに、駆動力配分制御装置2が駆動力配分制御を停止し、また、制動力制御装置3が制動力制御を行う。
(もっと読む)
車両のトラクション制御装置
【課題】クリープトルクに起因して駆動スリップが過大である状況に於いて、運転者により制動操作が行われる場合にも、トラクション制御を実行し、駆動輪の駆動スリップを抑制する。
【解決手段】運転者により加速操作が行われることなく(ステップ110)駆動輪にクリープトルクが作用している状況に於いて、駆動輪の駆動スリップが過大であるときには(ステップ130)、運転者により制動操作が行われていても駆動輪に制動力を付与して駆動スリップを抑制するトラクション制御を行い(ステップ180)、運転者により制動操作が行われている状況にてトラクション制御を行う場合には、駆動輪の駆動スリップ値に基づく目標制動力Fbtr1(ステップ182〜186)及び運転者による制動操作量に基づく目標制動力Fbtr2(ステップ188)のうち大きい方の値に基づいて駆動輪に付与される制動力を制御する(ステップ190、192)。
(もっと読む)
ブレーキ制御システム
【課題】少なくとも1輪以上の制動力発生機能が失陥した場合においても、どのような要求制動力の時でも前記失陥により発生するヨーモーメントを可能な限り抑制するとともに、最大限の制動力を確保する。
【解決手段】ブレーキ装置または制動力制御部に故障が発生したときに、各輪のブレーキ装置で発生させる制動力の合計が可能な限り要求制動力と等しくなるように、故障検出部の検出結果に基づいて、正常なブレーキ装置への目標制動力を算出する。
(もっと読む)
車輌制御装置
【課題】旋回制御の実行に伴う車輪ロックの抑制
【解決手段】制動力発生手段30FR,30FL,30RR,30RLに供給するブレーキ液圧を調圧可能な車輪WFR,WFL,WRR,WRL毎のブレーキ液圧調圧部,ブレーキ液を加圧して加圧後のブレーキ液圧を一対の前輪と後輪のブレーキ液圧調圧部に供給する対毎の加圧部(加圧ポンプ69,70)及び当該各加圧部を作動させる1つの電動機68を備えたブレーキ液圧調整手段40と、このブレーキ液圧調整手段40を制御することで車輌の旋回中に旋回内輪の内の少なくとも1つの車輪に対して制動力を働かせて回転半径の短縮又は維持を図る旋回制御を行う車輌制御手段(電子制御装置2)と、を有する車輌制御装置において、その車輌制御手段は、旋回制御の開始時に前輪側の旋回外輪の制動力発生手段へのブレーキ液圧を低下させた後で保持させるように構成すること。
(もっと読む)
車輌制御装置
【課題】旋回制御時に行われた運転者の制動要求を満足させること。
【解決手段】制動力発生手段30FR,30FL,30RR,30RLに供給するブレーキ液圧を調圧可能な車輪WFR,WFL,WRR,WRL毎のブレーキ液圧調圧部,ブレーキ液を加圧して加圧後のブレーキ液圧を一対の前輪と後輪のブレーキ液圧調圧部に供給する対毎の加圧部(加圧ポンプ69,70)及び当該各加圧部を作動させる1つの電動機68を備えたブレーキ液圧調整手段40と、このブレーキ液圧調整手段40を制御することで車輌の旋回中に旋回内輪の内の少なくとも1つの車輪に対して制動力を働かせて回転半径の短縮又は維持を図る旋回制御を行う車輌制御手段(電子制御装置2)と、を有する車輌制御装置において、その車輌制御手段は、運転者のブレーキ操作を検知した際に前記旋回制御を終了させるように構成すること。
(もっと読む)
駐車ブレーキ制御装置
【課題】駐車ブレーキにおけるロック制御時に、サービスブレーキにより発生させられる大きなW/C圧によってパッド磨耗が大きくなること等を防止する。
【解決手段】駐車ブレーキにおけるロック制御時に、ドライバのブレーキペダルの操作に基づくサービスブレーキにより発生させられるW/C圧が大きい場合(ステップ205)、W/C圧が目標W/C圧上限値TPWCUよりも低下させる(ステップ220)。これにより、サービスブレーキにより発生させられる大きなW/C圧によってパッド磨耗が大きくなることを防止できる。また、キャリパやブレーキ機構の体格重量等が大きくなることを防止でき、キャリパやブレーキ機構の小型化を図ることが可能となる。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において重要度の高いがタスクの待ち時間が長い場合に、待ち時間を短縮する。
【解決手段】複数の各タスクに、実行順序の優先度に応じて設定した初期重み値を与え、該初期重み値に基づく実行順序に従って前記複数のタスクを実行する車両制御装置において、各タスクの重要度に応じて重み付け値(W)を付与しておき、実行待ちタスクの待ち時間に基づいてタスクの実行順序の優先度を変更する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】システムオフ時に内燃機関の運転を停止する際に車両が移動するのを抑止する。
【解決手段】制動要求フラグFが値1のとき(S210)ときには、エンジンの停止に伴って遊星歯車機構を介して駆動軸としてのリングギヤ軸に作用するトルクによって車両が移動するおそれがあり車輪に制動力を付与する必要があると判断し、経過時間tの計測を開始し(S220)、経過時間tに基づいてブレーキトルクTb*を設定すると共に、設定されたブレーキトルクTb*に基づく制動力が出力されるようブレーキアクチュエータを制御する処理を、経過時間tの計測を開始してから所定時間trefが経過するまで実行する(S230〜S250)。これにより、システムオフに伴ってモータを制御することができない状態となっても、エンジンの運転を停止する際に車両が移動することを抑制することができる。
(もっと読む)
車両用減速制御装置及びその方法
【課題】自車両位置を正しく検出できない場合でも、適切に減速制御を行う。
【解決手段】車両用減速制御装置は、ナビゲーション装置14が提供する自車両位置情報と車両前方のカーブとの位置関係を基に、自車両を減速制御する制駆動力コントロールユニット8と、ナビゲーション装置14が提供する自車両位置情報のばらつきに起因して、制駆動力コントロールユニット8による減速制御がばらつくか否かを判定する制御変動判定部62と、制御変動判定部62が減速制御がばらつくと判定したときに、ナビゲーション装置14が提供する自車両位置情報によるものとは異なる制御内容で、車両前方のカーブに対応して減速制御を作動させる目標減速度変更部61とを備える。
(もっと読む)
161 - 180 / 260
[ Back to top ]