
Fターム[3D246JB43]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 時間に基づいて制御するもの (260)
Fターム[3D246JB43]に分類される特許
101 - 120 / 260
車両用制御装置
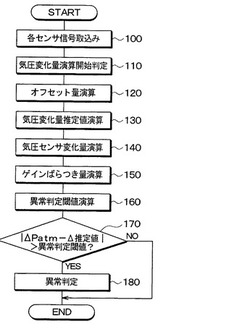
【課題】GPS受信装置が無くても大気圧センサの異常検出を行うことができるようにする。
【解決手段】前後加速度センサの検出信号に基づいて検出される勾配角度θや車輪速度センサの検出信号に基づいて演算される推定車体加速度dVに基づいて高度変化量を算出し、高度変化量から気圧変化量を推定する。そして、気圧変化量のセンサ値と推定値とを比較することにより、大気圧センサの異常を検出する。これにより、GPS受信装置が無くても大気圧センサの異常検出を行うことが可能となる。
(もっと読む)
ブレーキ制御装置

【課題】車輪にかかる制動力の差を低減しつつ、ホイールシリンダへブレーキ液を供給するためのポンプを起動したときの突入電流の重なりを防ぐブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置100は、液圧回路中に設けられたポンプを介して、駆動に応じてホイールシリンダ6にブレーキ液を供給する複数のポンプと、ポンプを駆動することでホイールシリンダ6へのブレーキ液の供給を制御するとともに、複数のポンプによるブレーキ液の供給の応答性を比較する制御手段と、を備える。制御手段は、ポンプによるブレーキ液の供給の応答性にもとづいてモータの駆動の開始のタイミングを異ならせる。
(もっと読む)
自動車およびその制御方法
【課題】二次電池の入力制限が厳しい側に変化したときでも電動機による回生制動力と機械式ブレーキによる制動力とのすり替えをスムーズに行なう。
【解決手段】バッテリの入力制限Winが所定時間程度経過したときに連続充放電電流積算値が閾値に至って入力制限Winが厳しい方向に変化するのを予測したときには、そのときから所定時間が経過するまでは比較的小さなレート値Trt1を用いてモータMG2の制動時のトルク指令Tm2*を油圧ブレーキによる制動力にすり替え(S150)、所定時間が経過した以降は比較的大きなレート値Trt2を用いてモータMG2の制動時のトルク指令Tm2*を油圧ブレーキによる制動力にすり替える(S160)。これにより、モータMG2の制動トルクをスムーズに油圧ブレーキによる制動力にすり替えることができ、ドライバに与えるブレーキフィーリングの悪化を抑制することができる。
(もっと読む)
車両の運動制御装置
【課題】急操舵に伴うアンダーステア状態の発生に先立って、車両を運動制御してアンダーステア状態の発生を抑制できるようにした車両の運動制御装置を提供する。
【解決手段】車輪に制動力を付与し、アンダーステア状態の発生を抑制するようにした車両の運動制御装置にして、操舵速度を算出する操舵速度算出手段(106)と、操舵速度算出手段によって算出された操舵速度が基準のしきい値より大きくなった場合に、旋回外輪に制動力を付与する制動力付与手段(110)を備えた。
(もっと読む)
車両運動制御装置
【課題】スプリット路面での車両の不安定性を応答性良く改善でき、ドライバによる修正操舵の振幅を一定範囲内に維持して行えるようにする。
【解決手段】ABS制御の制御モードとして増圧モードが設定されているときに、スプリット制御として、車両の安定性の指標となる舵角偏差driftvalueの絶対値|driftvalue|の大きさに基づいて、高μ路側の前輪に対するABS制御における増圧制御の増圧勾配に制限をかける。これにより、舵角偏差driftvalueに応じて応答性良く高μ路側の車輪の制動力の増加勾配を抑制できる。このため、左右輪間での制動力差を抑制することが可能になり、これに起因するヨーモーメントを抑制できると共に、スプリット路面での車両の不安定性を応答性良く改善できる。また、ヨーモーメントを打ち消すようなドライバによる修正操舵も軽減することができ、ドライバによる修正操舵の振幅を一定範囲内に維持して行うことが可能となる。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
ブレーキ制御装置
【課題】液圧保持中にブレーキペダルを踏み込んだ際のフィーリングを改善し、微小なブレーキペダル操作でマスタシリンダ圧が急上昇することを防止し、操作に応じた液圧変化が可能で通常のブレーキと同様な操作が可能なブレーキ制御装置を提供する。
【解決手段】アシスト制御ユニット6は、登坂車両停止検出手段において車両が登坂で車両停止していると判断され、かつペダルリリース検出手段によりペダルリリースされたと判断された場合には、ブレーキペダルBの操作に基づき移動する入力ピストン11aによる液圧減少分を電動のモータ31を制御し、アシストピストン21により補間し、マスタシリンダ3内の液圧を保持するブレーキ制御装置。
(もっと読む)
電子駐車ブレーキシステムを作動させる方法
本発明は、自動車駐車ブレーキシステムを制御する方法に関し、駐車ブレーキシステムは、駐車ブレーキ入力装置(10)から受ける信号に従って比例制動効果を達成するように電子制御されており、前記入力装置を介して車両のユーザは、駐車ブレーキの作動の程度を制御でき、ユーザが、駐車ブレーキ入力装置(10)を用いて駐車ブレーキ作動シーケンスを開始した後、入力装置(10)を解除することにより駐車ブレーキ作動シーケンスを終結したとき、車速が駐車ブレーキ作動シーケンス開始時に第1限界速度(V1)より低いか、又は駐車ブレーキ作動シーケンス終結時に第2限界速度(V2)より低ければ、シーケンスの終結時に、駐車ブレーキはかかった状態にロックされる。 (もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
電子駐車ブレーキシステムを作動停止させる方法
本発明は、車両の駐車ブレーキシステムを制御する方法に関し、該駐車ブレーキシステムは電子制御されており、ユーザは、駐車ブレーキ入力装置を介して駐車ブレーキの作動停止を要求することができ、ユーザが、駐車ブレーキ入力装置を用いて駐車ブレーキ作動停止要求を開始したとき、駐車ブレーキ作動停止要求が、少なくとも第1時間の間維持されれば、駐車ブレーキが作動停止する。 (もっと読む)
電子コントロールされる駐車・ブレーキ・システム
本発明は、乗り物のための駐車・ブレーキ・システムに関し、前記駐車・ブレーキ・システムは、駐車・ブレーキECU(20)を通じて電子コントロールされ、前記乗り物のユーザが前記駐車・ブレーキの付勢の程度をコントロールすることが可能な駐車・ブレーキ入力デバイス(10)から受信された信号に従って比例ブレーキング効果を達成し、前記駐車・ブレーキ入力デバイス(10)が、前記ユーザが、第1の位置と第2の位置の間においてベース(12)に関して変位させて、前記駐車・ブレーキの付勢の程度をコントロールすることが可能な操作部材(14)と、前記第1の位置と前記第2の位置の間における前記ベース(12)に関する前記操作部材(14)の瞬時位置を決定する少なくとも1つのセンサ(16)と、前記ユーザによって要求される前記駐車・ブレーキの付勢の程度を示すデジタル信号を生成するため、およびこのデジタル信号を少なくとも前記駐車・ブレーキECU(20)に伝達(19,22)するためのコントローラ回路(18)とを包含する。 (もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中に運転手によるブレーキ操作が変化しても、その変化に適切に対応した制動制御を実行できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中にダブルブレーキが検出された場合(第6タイミングt16)、車輪に対応して設けられたホイールシリンダ内のWC圧の増圧速度が速くなるように、ホイールシリンダ内のWC圧を増圧させる際に開動作する増圧弁に対する指令電流値Idを調整する。
(もっと読む)
車両の重心の高さを推定する方法
本発明は、各々少なくとも2つの車輪を有する少なくとも前車軸及び後車軸を備える車両の重心の高さを推定する方法に関し、前記方法は、a)実質的に同じ勾配を有する道路部分に沿って発生する第1制動時間及び第2制動時間であって、該第1制動時間及び該第2制動時間によって、異なる車両減速が起こる両制動時間を決定してから、両制動時間において、少なくとも以下の変数、−車両の加速(Acc)、−前車軸及び後車軸についての車輪スリップ率(WSR)、−前車軸及び後車軸の各々での制動力(Bkf)又は制動トルク、又はその比(K)、並びに−対応する道路部分の勾配(Slp)を推定するステップと、b)両方の時間に実施されるステップa)の推定値のみを用いて、車両の重心高さ(H)を推定するステップとを含む。 (もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両のパークロック装置
【課題】左右輪を個々のパークロック機構により回転拘束するパークロック装置のパークロック解除に際し、左右輪のパークロック解除が同時に完了するようになす。
【解決手段】左右パークロック負荷PLL(L),PLL(R)の大小関係から、左パークロック解除所要時間TPL(L)が右パークロック解除所要時間TPL(R)よりも長い場合、早期にパークロック解除を完了する側の右綸パークロック解除を遅延させる。この遅延は、一点鎖線で示すごとき解除速度低下、または二点鎖線で示すごとき解除開始タイミングの遅れにより、右綸パークロック解除が左綸パークロック解除と同じ瞬時t4に完了するようなものとする。これにより左右輪のパークロック解除が同時に完了することとなり、左右輪のパークロック解除完了タイミングがずれて運転者の予期しない車両挙動が発生する問題を回避し得る。
(もっと読む)
作業車両の制御装置
【課題】作業を容易に開始することができる作業車両の制御装置を提供する。
【解決手段】走行ペダルが非操作(PT≦PT1)で回転数Nが所定値N1以下の状態が所定時間継続されると、ブレーキロックと同時にラムシリンダをロックするようにしたので、煩雑なスイッチ操作をすることなくラムシリンダをロックすることができ、作業を容易に開始することができる。
(もっと読む)
車両のアイドルストップ制御装置
【課題】エンジンの自動停止中において、車両の車輪に対するブレーキ圧を、当該自動停止開始から現時点までの、ブレーキペダルの踏み込みによるブレーキ圧の最大値ないしその近傍の値に保持する場合において、その踏み込み量に関係なく、車両の発進時の挙動を安定させて、車両の乗員に対し常に良好な発進フィーリングを付与できるようにする。
【解決手段】ブレーキペダルの踏み込みの解放により該踏み込みによるブレーキ圧が所定値以下になったとき(時刻t2)に、車輪に対するブレーキ圧を所定圧に低下させるとともに、該低下完了後(時刻t3)に上記車輪に対するブレーキ圧を解放する。
(もっと読む)
車両のアイドルストップ制御装置
【課題】車両が停止している路面に傾斜が存在する状態でのエンジンの自動停止中に、変速レンジが走行レンジからNレンジに設定されたときにおいて、乗員が発進しようとして、誤って先にブレーキペダルの踏み込みを解放したとしても、車両の移動を抑制しながらスムーズな発進を行うことができるようにするとともに、乗員が坂道で意図的にNレンジにして車両を移動させようとする場合にも適切に対応できるようにする。
【解決手段】Nレンジに設定されたときから、ブレーキペダルの踏み込みの解放により該踏み込みによるブレーキ圧が所定値以下になったとき(時刻t12)からの経過期間が、予め設定した設定期間になるまでの間、車両の車輪に対するブレーキ圧を、上記解放に伴って所定圧よりも小さくならないように制御する自動ブレーキ制御手段を備える。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
車両の挙動制御装置
【課題】車輪に前後振動を与えることによる車輪の摩擦係数の増大効果を利用して、車両の制動停止距離を好適に短縮化する。
【解決手段】車輪の接地荷重を可変とし得るアクティブサスペンション機構400を備えた車両10において、ECU100は、アンチロック制御を実行する。当該制御においては、車両10が急制動状態にある場合に、アクティブサスペンション機構400により車両10に上下方向の振動が与えられる。一方、ECU100は、スリップ率SLが基準値を超えたタイミングと、車両振動が開始されたタイミングとに基づいて、タイヤμを最大とし得るピークスリップ率SLpkを推定するピークスリップ率SLpkが推定されると、ABS閾値がこのピークスリップ率SLpkに基づいて書き換えられる。
(もっと読む)
101 - 120 / 260
[ Back to top ]