
Fターム[3D246JB43]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 時間に基づいて制御するもの (260)
Fターム[3D246JB43]に分類される特許
81 - 100 / 260
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
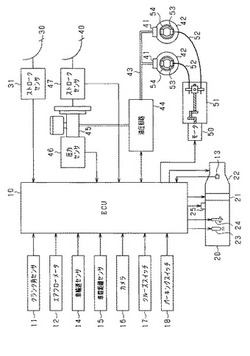
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
運転操作支援装置及び運転操作支援方法

【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
車両の制御装置
【課題】坂路で車両を停止させる際、制動装置を制御するソレノイドバルブの作動回数を抑制すると共に、車両の移動を抑制することができる車両の制御装置を提供する。
【解決手段】坂路においてブレーキペダル36の踏み込みが解除されても、制動手段100によって車速Vの上昇が制限されるため、規定時間Ta内ではパーキングロック可能な車速Vに制限される。したがって、パーキングレンジが選択された際に、ブレーキ油圧Pbkを制御するソレノイドバルブ50を再度作動させることが防止され、ソレノイドバルブ50の作動回数増加による耐久性低下が抑制される。また、ブレーキペダル36の踏み込みが解除されると、ホイールブレーキ46のブレーキ油圧Pbkが急激に低下せず、所定の勾配ΔPで低下するに従い制動力が発生するため、その車両の移動が抑制される。
(もっと読む)
制動制御装置
【課題】衝突形態に応じて最適な時間に亘って自動的に制動機構を作動させる。
【解決手段】自車両の衝突を検出する衝突検知センサ2a〜2dと、自車両の車速を検出する車速センサ4とを備え、制駆動力コントロールユニット12は、衝突検知センサ2a〜2dにより自車両の衝突が検出された場合に、当該衝突を検出した後に車速センサ4により検出された車速に基づいて、自動的に制動力を発生させる時間である自動制動時間を制御して、ブレーキ制御装置6を作動させる。
(もっと読む)
制動制御装置及び制動制御方法並びにそのプログラム
【課題】固着の発生を減少させることのできる制動制御装置を提供する。
【解決手段】車輪の速度が0に達するまでの時間である固着余裕時間とブレーキ圧力を開放するまでの時間を示す全ゆるめ時間とを比較して車輪が固着に至る可能性を判断し、車輪が固着に至ると判定された場合に、制動力を減じて車輪が固着するのを防止する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
走行制御装置
【課題】自車両と直前車両との車間距離を正確に制御することができる走行制御装置を提供する。
【解決手段】走行制御装置は、車間距離を短くする要求があった場合に、隊列の先頭車両が一定の加速度以上で加速中または加速予定であるときは、自車両と直前車両との車間距離を短くする制御を開始せずに待機し、先頭車両が一定の加速度以上で加速中または加速予定でないときは、自車両と直前車両との車間距離を短くする制御を開始する。また、走行制御装置は、車間距離を長くする要求があった場合に、隊列の先頭車両が一定の減速度以下で減速中または減速予定であるときは、自車両と直前車両との車間距離を長くする制御を開始せずに待機し、先頭車両が一定の減速度以下で減速中または減速予定でないときは、自車両と直前車両との車間距離を長くする制御を開始する。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
自動二輪車の制動装置
【課題】前輪のブレーキ操作力に適切なアシスト力を加えることにより、フロントサスペンションの伸び上がりをコントロールし、旋回性を良好にする。
【解決手段】前輪ブレーキのキャリパシリンダ8に連通路11、液圧制御部12を介してマスタシリンダ6を接続し、液圧制御部12には弁13を備え、コントロールユニット14にて開閉制御する。コントロールユニット14は車速センサ17より車速及び減速度を算出し、マスタシリンダ6に設けたマスタシリンダ圧検出センサ19よりブレーキ操作量を検出する。操作レバー5を放すと、コントロールユニット14はマスタシリンダ圧検出センサ19の検出する液圧低下に基づきブレーキ操作量の変化率を算出し、所定の割合を超えると弁13で連通路11を絞り、急激なキャリパ圧の低下を防いでブレーキ制動力を維持させ、フロントサスペンションの急な伸びを抑制し、コーナリングを容易にする。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
非常ブレーキ過程の実行方法
【課題】ブレーキ支援を備えた車両ブレーキ・システムにおいて、非常ブレーキ過程を終了させるために、ブレーキ力増強を快適且つ確実に終了させる、車両内のブレーキ支援システムによる非常ブレーキ過程の実行方法およびその制御装置を提供する。
【解決手段】ドライバにより設定されたブレーキ操作がブレーキ支援システムにより増強される、車両内のブレーキ支援システムによる非常ブレーキ過程の実行方法において、ブレーキ力増強の遮断が、少なくとも2つの段階内において、第1の状態変数の限界値に到達した第1の段階内において、ブレーキ力増強が低下され、他の状態変数の限界値に到達した他の段階内において、ブレーキ力増強が0まで低下される。
(もっと読む)
車輪速センサの異常検出方法及び車両のスリップ制御方法
【課題】センサ取付位置による誤差や外来ノイズ等の影響を受けず、車輪速センサの異常を検出すること。
【解決手段】左右の駆動輪の車輪速センサによる平均回転速度を検出し、変速機内の回転センサによる車輪速換算値を検出し、平均回転速度と車輪速換算値との差を逐次時間積分して相対角を求める。車輪速センサと回転センサとの各取付部での相対角の許容値を設定し、時間積分で得られた相対角がこの許容値を越えた場合に車輪速センサの異常と判定する。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車両制御システム
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図る技術を提供する。
【解決手段】ブレーキ制御装置は、ブレーキペダルの操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するものであり、ブレーキペダルのストロークを検出するためのストロークセンサと、ホイールシリンダ圧を検出するためのホイールシリンダ圧センサと、ブレーキペダルのストローク量に基づいてホイールシリンダの目標液圧dを算出し、ホイールシリンダの液圧を目標液圧dに近づけるように調節するためのブレーキECUと、を備える。ブレーキECUは、ホイールシリンダ圧センサの検出液圧値eを用いてホイールシリンダの液圧を調節する通常調節と、検出液圧値eを減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能である。
(もっと読む)
付随車用アンチロックブレーキシステム
【課題】電気ブレーキ指令線が無い貨車にも適用することができ、ブレーキ条件に依存することなく滑走防止制御演算部を起動させて、滑走を適切に抑制可能なアンチロックブレーキシステムを提供する。
【解決手段】空気圧力により制動力を発生させる制動力発生機構1と、速度センサ2と、速度センサ2からの回転速度信号に基づいて制動判別処理及び滑走判別処理を行い滑走状態であれば滑走防止信号を出力する滑走防止制御演算部3と、滑走防止信号を受け再粘着動作を行う滑走防止弁4と、車輪の回転運動に基づいて電力を発生する発電機5と、滑走防止制御演算部3に電力を供給可能な蓄電部6と、発電機5の出力を基に所定電圧を生成する電圧生成充電制御部7とを備え、電圧生成充電制御部7から発電機出力と蓄電部6の蓄電出力との高位優先電圧で滑走防止制御演算部3に電力を供給するアンチロックブレーキXとした。
(もっと読む)
電動車両の制動制御装置
【課題】電気的制動手段と油圧制動手段とを備え、アンチロック制御を行う際に、静粛性を向上することが可能な電動車両の制動制御装置を提供すること。
【解決手段】目標制動トルクを駆動系の共振周波数を含まない第1周波数成分と、駆動系の共振周波数を含む第2周波数成分とに分解し、第1周波数成分により電気的な制動トルクを与える電動モータを制御し、第2周波数成分により車輪に摩擦制動トルクを与える摩擦制動装置を作動させることとした。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
電動式ブレーキ装置
【課題】軸力センサにより安定したブレーキ力の検出を可能にするとともに、減速度検出値による制御と組み合わせてあらゆる速度域で高い精度にてブレーキ制御を行う。
【解決手段】ブレーキロータ23の回転面に直交させて電気アクチュエータ4によりブレーキパッド22を押し付けて制動を行う電動式ブレーキにおいて、前記ブレーキパッド22の押付け力を検出する軸力センサ10から得られた検出値と、車輪速度センサ30から演算されて得られた減速度とから、運転者の操作目標とする減速度制御を行うことにより、温度変化の影響を受けにくく指向性を保持し易い直動変換部13、14に配設した軸力センサ10と、制動中のブレーキパッド22の摩擦係数の変化の影響を受けにくい減速度検出とを組み合わせて、操作者のブレーキ要求に基づく電気的ブレーキ制御をあらゆる速度域にて高い精度にて行うことが可能となった。
(もっと読む)
81 - 100 / 260
[ Back to top ]