
Fターム[3D246KA15]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | コンピュータ自体 (42)
Fターム[3D246KA15]に分類される特許
1 - 20 / 42
車両挙動制御装置
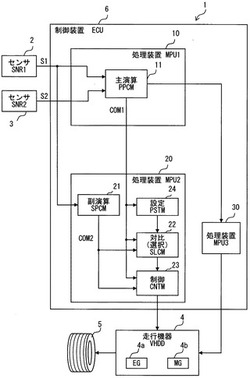
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
液圧制御装置

【課題】制御基板に対する電子部品の実装レイアウトの自由度を向上させた液圧制御装置を提供する。
【解決手段】各車輪のホイールシリンダに液圧を付与する液圧回路と、前記液圧回路を切り換えるソレノイドバルブと、このソレノイドバルブを駆動するソレノイドコイル2と、を備えた液圧機構8と、前記液圧機構8に固定されると共に、前記ソレノイドコイル2を制御する制御基板4を備えた電子制御装置3を有する液圧制御装置であって、前記ソレノイドコイル2のターミナル2aは、前記制御基板4と平行方向に延設された延設部25と、前記延設部25の一側端から制御基板4に向かって折り曲げられ制御基板4に接続される先端部26と、を有し、前記ソレノイドコイル2のターミナル2a引き出し位置よりも制御基板4の縁部に近い位置で制御基板4に接続する。
(もっと読む)
鞍乗り型車両
【課題】ヘッドパイプの後方かつエンジンユニットの上方に収納ボックスが配置され、該収納ボックスの後方かつエンジンユニットの後方斜め上方に燃料タンクが配置され、その燃料タンクの上方に乗車用シートが配置されるようにした鞍乗り型車両に、収納ボックスの容量に影響を及ぼすことなくアンチロックブレーキ制御ユニットを配設することを可能とする。
【解決手段】左右一対のメインフレーム18の後部から後上がりに延びて燃料タンク19の前部を跨ぐシート支持フレーム77が、その上端部で乗車用シート20の前部を支持するようにして左右一対のメインフレーム18間に設けられ、アンチロックブレーキ制御ユニット37がシート支持フレーム77で上方から覆われる位置に配置される。
(もっと読む)
自動車
【課題】インバータの複数のスイッチング素子の一部を含む閉回路が形成される閉回路異常が生じている状態でイグニッションオフされた後に、その閉回路異常に起因する不都合が生じるのを抑止する。
【解決手段】閉回路異常が生じている状態でイグニッションスイッチ60がオフされたときには、駆動輪39a,39bおよび従動輪39c,39dに制動力が付与されるようブレーキアクチュエータ42を制御する。これにより、閉回路異常が生じている状態でイグニッションスイッチ60がオフされた後に、閉回路に電流が流れるのを抑止することができ、閉回路異常に起因する不都合が生じるのを抑止することができる。
(もっと読む)
制動履歴データベース作成装置及び作成方法
【課題】車両における省燃費運転の精度を向上すること。
【解決手段】車両の位置情報を取得する位置情報取得部11と、車両の制動装置が作動していることを判定する制動判定部12と、を備え、位置情報取得部11が取得した位置情報とともに制動装置の制動履歴が格納されるデータベース21を作成する。制動履歴取得部15は、位置情報取得部11が取得した車両の位置情報に基づいて当該車両の進路上にある制動履歴などのデータをデータベース21から取得する。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
コンピュータプログラム及び数値計算装置
【課題】分布定数系の微分方程式を少ない演算量で解けるようにする。
【解決手段】全ての計算時刻について値が与えられる第1の変数と、初期値のみが与えられる第2の変数とで定義される被積分関数に関する積分演算をコンピュータで実行し、各計算時刻で使用する前記第2の変数の値を算出するために、以下の処理を実行する。まず、被積分関数を第2の変数について偏微分して求めた偏導関数を記憶装置から読み出す。各計算時刻では、初期値又は直前回の計算時刻に算出された第2の変数の値と、現計算時刻に与えられる第1の変数の値を、被積分関数と偏導関数にそれぞれ代入して現計算時刻における被積分関数の値と偏導関数の値をそれぞれ算出する。この後、算出された被積分関数の値を初期値とし、かつ、当該被積分関数の値に偏導関数の値を乗算して算出された値を傾きとする指数関数を用い、次回計算時刻に使用する第2の変数の値を算出する。
(もっと読む)
ブレーキ制御装置
【課題】ECUに異常が生じる前にモータ駆動回路の作動状態を点検できるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置において、CPU222および入出力IC224は、ポンプを駆動するモータ632の駆動を制御する。複数のモータ駆動回路は、それぞれがモータ632の駆動信号を個別に出力し、並列に配される。調停回路232は、CPU222または入出力IC224の異常を示す信号を受け取った場合に、複数のモータ駆動回路の駆動信号のうち、いずれか一つの駆動信号を選択して出力し、該駆動信号をモータ632に供給する。CPU222および入出力IC224は、CPU222および入出力IC224の異常を示す信号を出力し、調停回路232から受け取ったモータ駆動回路の出力にもとづいてモータ駆動回路の作動状態を点検する。
(もっと読む)
車両用電子制御装置
【課題】個々の運転者のトレーラーの使用方法によって、別の機能を制御するのに適したトレーラー電子制御装置を要求していた。個々の運転者に向けた特殊な制御の提供は、高価である。
【解決手段】ECUが制動に関連する車両に特定の制御パラメータを記憶するための不揮発性記憶手段を有するものであり、該ECUは、車両の一又は複数の補助機能用の動作データを保持するプログラマブル記憶手段をさらに別個に備え、前記データは、エラー状態に対して制動機能を保護するように所定のリストを参照して一又は複数の入出力変数及び制御アルゴリズムを検査するのに使用可能である。
(もっと読む)
車輪速検出装置及び車輪速検出方法
【課題】サスペンション装置に起因する外乱が入力されても、車輪速を適切に検出することができる車輪速検出装置及び車輪速検出方法を提供すること。
【解決手段】本発明による車輪速検出装置1は、車両の車輪を回動自在に支持する支持手段に設けられて車輪の車輪速ωを検出する車輪速検出手段2と、車輪速検出手段の車両の車幅方向に平行な回転中心周りの回転θを検出する回転角検出手段3と、車輪速ωを回転角θに基づいて補正する補正手段4aを含むことを特徴とする。
(もっと読む)
電動倍力装置
【課題】ECU及びステータを容易に接続することができる電動倍力装置を提供する。
【解決手段】ケーシング本体12の外周には電動モータ31のステータ33の近傍に基板類58a、58b、58c(ECU)を収納するECUケーシング54が取付けられ、ケーシング本体12の開口部をリヤカバー13で塞ぎ、ケーシング本体12により平坦部側貫通孔62a(貫通孔)を設け、平坦部貫通孔62aを通ってステータ33とECUとを接続するバスバー63を設けた。バスバー63は、一端部がステータ33に連結された状態で、他端部が、平坦部貫通孔62aから突出するように取付けられる。組立てに際し、平坦部貫通孔62aを有するケーシング本体12にステータ33およびバスバー63を設けたので、バスバー63を平坦部貫通孔62aに挿通した状態でケーシング本体12とリヤカバー13との組み付けを容易にできる。
(もっと読む)
電気機械式ブレーキが取り付けられた航空機のためのブレーキングシステム構造
【課題】電気機械式アクチュエータを使用して、総重量の減少と、信頼性の維持が可能な、新規なブレーキングシステム構造の提案。
【解決手段】少なくとも1つの電気機械式アクチュエータ(3)を含む、複数の電気機械式ブレーキが取り付けられた航空機のためのブレーキシステム構造に関する。着陸装置の底部においてブレーキの近傍に配置された少なくとも1つの近傍ユニット(50)を具備し、近傍ユニットは入出力手段を含み、入出力手段(51)は、少なくともブレーキに付設されたセンサー(30)からの信号を収集及び較正し、かつ、着陸装置に沿って延びるコミュニケーションバス(60)によりアクチュエータを制御するための制御部材(10)に、このようにして処理された信号を伝達し、さらに、近傍ユニットがアクチュエータの制止部材(70)を制御するための制御手段(52)を含む。
(もっと読む)
制動シミュレーション装置
【課題】ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更を可能とする制動シミュレーション装置を提供する。
【解決手段】車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備え、補正手段が車体速度と車輪回転速度に基づいて算出されるスリップ率をデータマップにより補正して補正スリップ率を求め、この補正スリップ率に基づいて補正車輪回転速度を算出して、ABS制御ユニットに出力するようにした。
(もっと読む)
電気制御式ブレーキ装置
【課題】電気制御式ブレーキ装置において、ブレーキ装置の利用可能性および機能性を低下させることなく、それにより費用を低減可能な手段を提供する。
【解決手段】少なくとも2つの制御モジュールRPM1、RPM2が設けられ、それらの制御モジュールは、それぞれ1つまたは複数の電気操作式アクチュエータA1、A2を介して少なくとも2つの車輪ブレーキからなるグループをそれぞれ操作する。これらの制御モジュールの各々に、少なくとも2つの測定装置により測定された、ドライバによるブレーキ・ペダルの操作を表わす少なくとも2つの値が供給される。
(もっと読む)
車両の制動制御装置
【課題】エンジンの自動停止中は車両を確実に停止させながら、エンジンの自動再始動後は車両の発進性および加速性を向上させることが出来るようにする。
【解決手段】エンジン11を自動停止および自動再始動させるアイドル制御手段42と、車両10の駆動輪13のトルクTRQwhlを演算する駆動輪トルク演算手段51と、エンジン11が自動停止中にブレーキ装置27,28を作動させ車輪13に制動トルクTRQbrkを加える自動ブレーキ手段52と、車輪13の制動トルクTRQbrkの大きさを設定する制動トルク設定手段53と、エンジン11が自動再始動すると、車輪13に加えられた制動トルクTRQbrkを所定の緩和速度Vbrkで緩和させる制動トルク緩和手段55と、駆動輪トルクTRQwhlに応じて緩和速度Vbrkを変更する緩和速度変更手段56とを有するように構成する。
(もっと読む)
航空機電動ブレーキ制御システム
【課題】左右車輪の一方が制動不能になることを防止する航空機電動ブレーキ制御システムを提供する。
【解決手段】左右電動ブレーキ装置101、201が左右車輪を独立して制動する航空機電動ブレーキ制御システムであって、第一ブレーキシステム制御ユニット120は、左第一ストロークセンサ111の操作量検出信号に応じて左電動ブレーキ装置101に対する制動力指令値を演算するとともに、右第一ストロークセンサ211の操作量検出信号に応じて右電動ブレーキ装置201に対する制動力指令値を演算し、第二ブレーキシステム制御ユニット220は、左第二ストロークセンサ112の操作量検出信号に応じて左電動ブレーキ装置101に対する制動力指令値を演算するとともに、右第二ストロークセンサ212の操作量検出信号に応じて右電動ブレーキ装置201に対する制動力指令値を演算する構成とした。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態の速やかな解消を補助できる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態にある場合には、前輪の車輪速度VWFを調整すべくアクセル操作を運転手が行うことを契機にグリップ力回復制御が実行される。すなわち、転舵輪である前輪は、その車輪速度VWFが運転手によって調整されつつ、その転舵角σの絶対値が一時的に小さくなるように調整される(第3タイミングt3)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第4タイミングt4)。
(もっと読む)
監視装置、電子制御装置
【課題】演算装置の動作状態を監視する監視装置において、監視必要時間を短縮すること、及び監視必要時間を短縮可能な監視装置を備えた電子制御装置の提供。
【解決手段】監視装置20では、制御マイコン11から回答信号が入力される毎に、その回答信号が交互に入力されるチェッカ30A,Bが、回答信号中の回答番号と、先に制御マイコン11に供給された対応番号の正答番号とを比較する。これと共に、比較結果を反映した宿題番号を、次番号として生成し、番号選択部23を経てシリアル通信部21に供給する。そして、シリアル通信部21が、制御マイコン11から回答信号を取得すると、番号選択部23から供給された宿題番号(次番号)を含む宿題信号制御マイコン11に出力し、その次番号に対応する演算を制御マイコン11に実行させ、さらに、回答信号を取得することで、上述したサイクルを繰り返し実行する。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】車両の状態量、運転者の操作量を示すセンサ信号を取り込むセンサコントローラ2と、前記センサ信号に基づいて制御目標値を生成する指令コントローラと、制御目標値を受けて車両を制御するためのアクチュエータ5を作動させるアクチュエータコントローラ3と、がネットワークで接続される車両制御装置であって、前記アクチュエータコントローラ3は、前記指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラ3が受信したネットワーク上のセンサ値に基づいて制御目標値を生成する制御目標値生成手段を有し、前記制御目標値によってアクチュエータ5を制御する。
(もっと読む)
車両制御装置
【課題】本発明は、複数のマイクロコントローラを有し、マイクロコントローラ間をシリアル通信で接続した車両制御装置において、CPU負荷を増大させること無くマイクロコントローラ間のデータ参照を実現するとともに,制御アプリケーションソフトを容易に開発できるようにすることを目的とする。
【解決手段】本発明は、演算手段とデータ記憶手段と通信手段とを有する演算処理装置を複数有する車両制御装置において,前記演算処理装置は,前記データ記憶手段へのアクセスを監視して、前記データ記憶手段のデータが更新されたことを検知すると、更新されたデータと当該アドレスを取得して前記通信手段に渡し、他の1つないし複数の前記演算処理装置への送信を起動するデータ更新監視手段を備えた。
(もっと読む)
1 - 20 / 42
[ Back to top ]