
Fターム[3F027CA01]の内容
Fターム[3F027CA01]の下位に属するFターム
板(紙)、帯状物品 (57)
円柱(筒)、びん状物品 (31)
棒、長尺状物品 (7)
パレット、台車 (24)
Fターム[3F027CA01]に分類される特許
201 - 206 / 206
コンベヤ
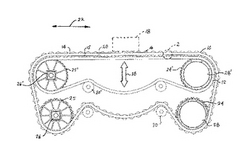
【課題】ゾーンアキュムレーターにより搬送品のぶつかり合いをなくした、バックライン圧力が皆無のコンベヤを提供する。
【解決手段】外側に位置するベルト10と、ベルト10の内側に配置されるベルト12を備え、複数のローラー16が外側に位置するベルト10に回転自由に設けられている。ローラー16の周側面が前記外側に配置されるベルト10の外側面と内側面の両面から突き出ており、外側面に突き出たローラー16の周側面が搬送品18の下側に接触し、さらに内側のベルト12の外側面は外側のベルト10の内側面から突き出ているローラー16の周側面と接触するように構成されている。内外両ベルト10,12の相対的な動きで、内側のベルト12に接触のローラー16が回転する。ベルト10,12の駆動進行方向は、同じ方向又は相対的に異なる方向であり、内外二つのベルト10,12の相対進行速度により、ローラー16の回転方向と回転速度がきまる。
(もっと読む)
アキュムレーションコンベヤシステム
アキュムレーションコンベヤシステム及び物品を集積する方法は、複数の物品を物品のスラグに集積するアキュムレーションアセンブリを提供することを含む。物品のスラグは搬送ラインへ排出され、この搬送ラインはスラグを搬送しかつスラグを必要に応じて集積する。アキュムレーションアセンブリはスラグ形成区分から成っており、このスラグ形成区分はスラグ部分を形成し、スラグ部分をスラグになるように排出する。アキュムレーションアセンブリは、複数のゾーンにおいて物品を集積し、物品の間の間隙を、上流の間隙から下流の間隙へ順番に減じる。 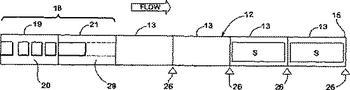 (もっと読む)
(もっと読む)
荷物移動アクチュエータのためのシステムおよび方法
荷物搬送システムにおける荷物移動アクチュエータ(104)のコントロールのためのシステム、方法およびコンピュータプログラムコードが提供される。これは例えばその目的地または進路等である荷物の所望の特性を定めること、および、荷物アクチュエータをコントロールするための複数のストラテジーを評価および採点すること、および、荷物(102)を動かすストラテジー(300)を所望の荷物特性に応じて選択することを含む。  (もっと読む)
(もっと読む)
運動制御プログラミング装置および運動制御プログラミング方法
本発明の装置は、少なくとも1つの荷物を運動させる複数の荷物アクチュエータを備え、少なくとも1つの荷物の所望の挙動に関する命令を受け取るインタフェースとプロセッサとを有する。このプロセッサは所望の軌道または目的地にしたがって荷物を運動させるための制御信号を荷物アクチュエータへ送信する。  (もっと読む)
(もっと読む)
商品搬送機構

【課題】回転寿司店等において、注文した商品が、商品供給場所から商品受け取り場所まで搬送される途中の経過を、商品受け取り場所の順次変化する画像で表示する機能を実現すること。
【解決手段】本発明の商品搬送機構では、商品供給場所(厨房)から商品受け取り場所(客席)まで商品を搬送する搬送手段を備えた商品搬送機構において、商品受け取り場所には画像表示手段(タッチパネル式ディスプレイ装置)を設けると共に、搬送手段によって搬送される商品が商品受け取り場所に到達するタイミングに合わせて前記画像表示手段に表示される画像を順次変化させる制御手段を備えるという手段を講じた。
(もっと読む)
物品搬送装置
【課題】 物品を搬送方向の前後から挟む搬送爪(82)(82)が並列状態の二本のコンベヤチェーンに各別に取付けられた搬送コンベヤを有する物品搬送装置において、障害物の衝突やコンベヤチェーンの経年的な伸びによって前後爪(27a)(27b)(17a)(17b)の間隔が変化してもこれを自動的且つ正確に計測できるようにする。
【解決手段】 前記搬送方向に直角で且つ前記搬送コンベヤの幅方向に延びる直線状の爪監視エリアを通過する前記各搬送爪(82)(82)を検知して該各搬送爪(82)(82)に各別に対応する爪検知信号を出力する爪監視手段(86)と、第1番目の搬送爪(82)とこれに続く第2番目の搬送爪(82)が前記爪監視エリアを通過した際に前記爪監視手段(86)が出力する2つの爪検知信号の時間的なずれの間に前記搬送コンベヤが走行した走行距離を計測する走行距離計測手段を具備させたこと。
(もっと読む)
201 - 206 / 206
[ Back to top ]