
Fターム[3F027CA01]の内容
Fターム[3F027CA01]の下位に属するFターム
板(紙)、帯状物品 (57)
円柱(筒)、びん状物品 (31)
棒、長尺状物品 (7)
パレット、台車 (24)
Fターム[3F027CA01]に分類される特許
121 - 140 / 206
傾斜又は垂直コンベアの逸走防止装置
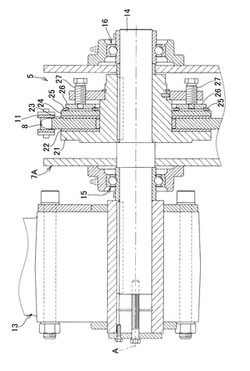
【課題】ハンガーを暴走後に停止させる際の衝撃を緩和して、逸走防止装置の小型軽量化及び低コスト化を図る。
【解決手段】コンベアにより移動するハンガーの下流側面に当接して係止するドッグが設けられた無端状チェーン11、無端状チェーン11が係合する駆動スプロケット8及び従動スプロケット、駆動スプロケット8を駆動するギヤドモータ13、ハンガーの暴走時に無端状チェーン11を停止させる制動装置、並びに、ハンガーの暴走を検知する暴走検知装置を有する逸走防止装置であって、ギヤドモータ13の出力軸14と駆動スプロケット8との間にトルクリミッタ5を設け、トルクリミッタ5の回転伝達トルクの限界値を、制動装置による制動トルクよりも小さく設定した。トルクリミッタ5により前記回転伝達トルクの限界値を超えるトルクが遮断されるため、ハンガーを暴走後に停止させる際の衝撃が緩和される。
(もっと読む)
搬送コンベヤ

【課題】被搬送物の全長より短い全長の搬送体を用いて被搬送物をストレージ搬送させる際の被搬送物同士の衝突を駆動制御回路に係わらず簡便かつ確実に防止できるとともに保守メンテナンス作業などに際して逆走を簡便に達成できる搬送コンベヤを提供する。
【解決手段】衝突防止機構130が、先行走行する搬送体110とコンベヤ軌道上で接触して沈下する感知ローラ131と、この感知ローラ131を一端に回転自在に軸支するとともに感知ローラ131の浮沈動作に応じて揺動する感知レバー132と、この感知レバー132の揺動する他端に一端を連結した連結ロッド133と、この連結ロッド133の他端に一端を連結させて前記感知ローラ131が先行走行する搬送体110と接触したとき後続走行してくる搬送体110をコンベヤ軌道上で隆起して所定のストレージ搬送間隔Lsに走行規制するストッパーレバー134とを備えている搬送コンベヤ。
(もっと読む)
検査方法及び検査装置
【課題】複数の検査対象部品の移動速度を遅くせずに一定速度で移動している状態で、高精度で良否の検出を行うことができる検査方法及び検査装置を提供する。
【解決手段】移送手段13は複数の被検査品11を一定間隔で保持する支持部材12を載置する載置部16を備え、モータ15により駆動される。検査手段14は載置部16上に載置されて支持部材12と共に一定速度で移動する被検査品11を順次検査する。モータ15は、載置部16が支持部材搬入部17と対応する位置で停止した状態から移送手段13の駆動を開始して、支持部材12が検査手段14の検査領域に到達するまでに支持部材12が予め設定された所定速度に達するとともにその所定速度で検査領域を通過し、その後、支持部材12が支持部材取り出し部18と対応する状態で停止するように、制御装置20により制御される。検査手段14による検査時に不良品が存在した場合、制御装置20がその不良品を特定する。
(もっと読む)
搬送設備
【課題】本発明は、チェーンが切断される恐れを回避するために、チェーンに予め弛みを持たせる必要がある搬送設備において、緊急停止を実現できる搬送設備を提供することを目的とする。
【解決手段】本体フレームの搬送方向上流端および下流端に回転自在に設けた左右一対のスプロケット38,39と、左右一対の上流端のスプロケット38と下流端のスプロケット39と間にそれぞれ、スプロケット39からの復路側に弛みを持たせて張設された左右一対の無端チェーン40と、左右の無端チェーン40間に渡って設けられ物品を支持する複数の物品支持体を備え、設備を停止するとき、制動装置32は上流端のスプロケット38を制動し、サーボアンプ61は、エンコーダ33から出力されるパルスを回転指令値としてサーボモータ34を駆動し、下流端のスプロケット39をスプロケット38に同期して停止する。
(もっと読む)
トレイ載置位置検出装置
【課題】各種の高さ寸法の移送対象物についての適用および簡易なトラッキング作業を確保しつつ、作業能率および検出精度を向上することができるトレイ載置位置検出装置を提供する。
【解決手段】トレイ載置位置検出装置は、多数のトレイTを載置して搬送するコンベヤ4を備え、該コンベヤ4の幅を前記トレイTが複数個分並列して載置できる寸法に形成し、該コンベヤ4の搬送方向外側には通過する前記トレイTのコンベヤ上の載置位置を側方から検出するトレイセンサ12aを設けたものである。
(もっと読む)
搬送設備
【課題】物品横押し体に所定値を越える外力が作用した場合に、ローラ軸を分離して前記外力による物品への悪影響を回避できるとともに、前記分離を直後に検出でき、緊急停止できる搬送設備を提供する。
【解決手段】物品横押し体52の横押し作用部72に所定値以上の外力が作用すると、スリット80内方の部材79bが折れてローラ軸53が摺動部71より外れる構成とすることにより、前記外力が続いて物品に悪影響が及ぶことを回避できる。またこのとき摺動部71の下方に残されたスリット80外方の部材79aを検出する外れ検出装置101を、各往路案内装置90の下流にそれぞれ設けることにより、ローラ軸53の分離を直後に検出して無端チェーンを緊急停止でき、よって前記外力の作用を受けた物品およびその仕分け位置を確認でき、ローラ軸53が外れた物品横押し体52を早急に復旧することができる。
(もっと読む)
平ベルトコンベア蛇行修正方法及び装置
【課題】本発明は、平ベルトコンベア蛇行修正方法及び装置に関し、簡易な構成で応答性よくかつ適切に平ベルトの蛇行修正を行うことにある。
【解決手段】平ベルト14を搬送方向両端でローラ16,18により支持した平ベルトコンベア12の蛇行を修正する方法において、平ベルト14の蛇行を蛇行検出センサ22で検出し、その蛇行検出センサ22で平ベルト14の蛇行が検出された場合に、その平ベルト14に対してその表面に直交する方向に蛇行修正機構26の有するシリンダ28で押圧力を加えることにより、そのベルト幅方向でその平ベルト14の走行に対する抵抗の不均一な分布を発生させる。
(もっと読む)
基板内蔵型モータの制御装置
【課題】信号線を共有化し、少ない信号線で基板内蔵型モータの複数の動作を制御することができる制御装置を提供することである。
【解決手段】コンベアに備えたローラ7を駆動する基板内蔵型モータ1を制御する制御装置6において、制御装置6は、複数種類の制御信号を共通の信号線11を介してシリアル通信によって基板内蔵型モータ1側へ送信する。又は、制御装置6は、共通の信号線11を介して複数種類の制御信号を直列に基板内蔵型モータ1側へ送信する。制御信号を物理量の複数の値,量又は領域によって構成し、物理量の値,量又は領域によって前記異なる種類の制御信号を構成した。異なる種類の制御信号は、モータ1の起動と停止,モータ1の回転速度,及びモータ1の回転方向を司る信号である。
(もっと読む)
仕分け設備
【課題】横桟の位置ずれが大きい場合でも正常位置に戻し得る仕分け設備を提供する。
【解決手段】無端ベルト体44の上下面の各前後に配置された横桟45により書籍の案内空間部Sが設けられた仕分けコンベヤ31における横桟の位置ずれを修正するための位置ずれ修正装置101を書籍の供給位置よりも上手側に配置し、この位置ずれ修正装置を、仕分けコンベヤに設けられた被検出板体102を検出して当該コンベヤを検出し得る検出センサ103と、当該検出センサから所定距離だけ下手側に配置されて仕分けコンベヤの下面の横桟を検出する横桟検出手段104と、前記検出センサからの検出信号を入力して前記横桟検出手段に検出動作信号を出力する検出動作指示部113と、前記横桟検出手段からの出力信号を入力して横桟が位置ずれしていると判断した場合に、回動力付与手段61に作動信号を出力して横桟の位置ずれを無くすための位置ずれ修正指示部114とを具備したもの。
(もっと読む)
コンベヤ装置
【課題】本発明は、ガイドに擦れて搬送物が移動するとき、この搬送物がガイドに引っ掛かることなく、かつ光センサにより搬送物の通過を検出できるコンベヤ装置を提供することを目的とする。
【解決手段】搬送面1に沿ってその左右両側上方にガイド3を配置し、これら左右のガイド3により搬送面1上に搬送路Xを設定し、本2をガイド3により案内しながら搬送路Xに沿って搬送するコンベヤ装置において、搬送路Xに沿って搬送面1により搬送される本2の通過を検出する光センサ6a,6bをそれぞれガイド3の搬送路Xに面しない裏面側に設け、またガイド3の搬送路Xに面した表面を、段差、凹凸および隙間が無い滑らかな面に形成し、また光センサ6を設ける位置のガイド3の裏面を削って、ガイド3の厚さを光センサ6より照射される光が透過するよう薄くした薄肉部12を、ガイド3の表面に設ける。
(もっと読む)
搬送装置、画像読取装置及び画像記録装置
【課題】搬送異常の発生及びその原因を早期に判定することのできる搬送装置、画像読取装置及び画像記録装置を提供する。
【解決手段】搬送対象物を搬送するリニアモータ4と、リニアモータ4に対して駆動電流を供給するモータ駆動部34と、リニアモータ4の搬送状態を検出するロータリエンコーダ20と、ロータリエンコーダ20による検出結果に基づいてモータ駆動部34をフィードバック制御する搬送制御部と、ロータリエンコーダ20による検出結果に基づいて搬送異常の判定を行う異常判定部36と、異常判定部36による判定結果を出力する表示部38と、を備えている。
(もっと読む)
放出供給部を有するコンベヤアセンブリ、このようなコンベヤアセンブリを有する書類処理ライン、および製品放出方法
【課題】製品を放出するために適した放出供給部を有するコンベヤアセンブリであって、処理している間、製品が間違って放出されたり、詰まってしまったり、遅延の理由となる他の製品処理を妨げることを防止するコンベヤアセンブリを提供する。
【解決手段】上流ベルトコンベヤ2は、排出端部2aによって、下流ベルトコンベヤ3の供給端部3aに連結され、 排出端部2aは、排出端部リターンプーリ10aによって画定され、供給端部3aは、供給端部リターンプーリ11aによって画定され、排出端部リターンプーリ10aおよび/または供給端部リターンプーリ11aは、二つのリターンプーリ10a,11aの間の放出開口を形成するために、各コンベヤ2,3の搬送面に平行な面内でコンベヤ2,3の搬送方向Tに沿って移動可能に配置されている。
(もっと読む)
電子回路を有する装置を搬送する方法及びその搬送に用いる搬送器具
【課題】静電気に弱い装置に静電気ダメージを与えることなく搬送する搬送方法とその搬送方法に用いられる搬送器具を提供する。
【解決手段】本発明の一つの態様は、空中に帯電化を自己放電する自己放電部13にアクチュエータ107に装着されたFPCコネクタ130の接地端子を電気的に接続した状態において、それを搬送する。これによって、搬送時に、FPC121などに帯電している電化を自己放電材料からゆっくりと放電することができ、製造工程において帯電した静電気のESD(Electro Static Discharge)によるサージ電流が、ヘッド素子部の静電破壊もしくは特性劣化をひき起こすことを防止することができる。
(もっと読む)
搬送制御システム
【課題】安価、且つ、生産性高く、混在した状態で供給される複数種類の部材を処理する。
【解決手段】搬送制御システム1は、混在した状態で供給された複数種類の部材を到着順に取り出し可能な部材取出口2と、部材取出口2から取り出された部材を一時的に格納可能なバッファ部3と、部材取出口2又はバッファ部3から部材を取り出し、制御部6により設定された搬送先に部材を搬送する搬送装置4a,4bと、部材取出口2とバッファ部3内における部材の格納状況、及び搬送装置4a,4bの稼働状況に従って、部材取出口2とバッファ部3との間で部材の取り出し元、部材を使用する生産設備5a,5bとバッファ部3との間で部材の搬送先を決定し、搬送装置4a,4bによる部材の搬送処理を制御する制御部6とを備える。
(もっと読む)
搬送システム
【構成】 シュート上の物品をセンサが所定時間以上継続して検出すると、シュートのコンベヤと分岐器とを停止させ、待機時間経過後に短時間コンベヤのみを再起動する。この間にセンサが物品を検出しなくなると、コンベヤを動作させると共に分岐器も作動させ、物品を検出したままの場合、再度待機時間の間待機する。
【効果】 シュートの下流側に空きスペースができると、シュートを自動的に再起動できる。
(もっと読む)
自動搬送システム
【課題】簡易な構成で荷の搬送ずれを検知することができる自動搬送システムを提供する。
【解決手段】搬送ずれを検知しようとする自動搬送設備の次の経路の制御盤からの搬送要求情報を受け取っているか否かを確認し(S3)、搬送要求情報を受け取っているのに自動搬送設備により搬送中であることを示す搬送データが存在しない場合には(S4)、管理コンピュータが管理するデータに対して実際の荷が余っている状態の搬送ずれが発生していると判断し、搬送要求情報を受け取っていないのに自動搬送設備により搬送中であることを示す搬送データが存在する場合には(S7)、管理コンピュータが管理するデータに対して実際の荷が足りない状態の搬送ずれが発生していると判断し、異常である旨を表示した後(S5)、搬送ずれを引き起こした原因を排除して復旧を図る(S6)。
(もっと読む)
物品検出装置
【課題】物品搬送方向においてコンパクト化を図りながら、突出位置に位置する検知体をスムーズに下降させることができる物品検出装置の提供。
【解決手段】物品載置搬送装置における載置搬送面よりも上方に突出する突出位置と載置搬送面よりも下方に引退する引退位置とに昇降自在に且つ突出位置に復帰付勢される状態で配置された物品検出用の検知体4と、その検知体4の下降を検出する下降検出手段5とが設けられ、検知体4が、物品搬送方向下手側ほど上方で且つ水平に近い状態となる曲面を備えて構成され、検知体4を物品搬送方向下手側ほど下方に案内する案内面15を備えた案内手段16と、案内手段16の案内面14にて案内された検知体4を突出位置に復帰させるように復帰付勢する復帰付勢手段18とが設けられている。
(もっと読む)
加熱炉へのスラブ装入方法
【課題】 ウォーキングビーム式加熱炉へのスラブ充填率の向上を図ることを目的とする。
【解決手段】 ウォーキングビーム式加熱炉に複数のスラブを連続的に装入して加熱するに当たり、先行スラブと後行スラブの間隙Lを下記(1)式によって定めることとするものである。
L=(ΔW1+ΔW2)/2+α・・・・・(1)
ここに、
ΔW1:先行スラブの装入時温度と該スラブの抽出設定温度から算出される先行スラブの幅方向熱膨張量
ΔW2:後行スラブの装入時温度と該スラブの抽出設定温度から算出される後行スラブの幅方向熱膨張量
α:ウォーキングビーム式加熱炉の最小スラブ間隔
(もっと読む)
ターンテーブル
【課題】被搬送物の進行方向の変更を短時間の内に開始する。
【解決手段】搬送軌道の搬入側と搬出側とにそれぞれ連絡可能にされた入口側端部Aと出口側端部Bとを有し、被搬送物を入口側端部Aから出口側端部Bに搬送する第1軌道3および第2軌道4と、第1軌道3および第2軌道4が設けられたテーブル部材7と、テーブル部材7を任意の回転角度で停止可能に回転させるテーブル回転機構8と、第1軌道3および第2軌道4を搬送される被搬送物の搬送方向の回転を制御するテーブル回転制御機構とを有している。第1軌道3および第2軌道4は、搬送方向が設定されたときに、何れかの第1軌道3および第2軌道4の入口側端部Aが搬送軌道の搬入側に連絡されるように、テーブル部材7に配置されている。
(もっと読む)
クロスベルトソータ
【課題】案内路の上下水平域間で台車が反転しないクロスベルトソータにおいて、ベルトコンベヤの駆動・制御用給電に一部台車のみが電源側となる給電方式の採用。
【解決手段】クロスベルトソータにおいては、上下二層の直線走行路をもつ循環走行路に沿って反転をしないまま駆動走行される複数の台車3が無端可撓体2に連結支持部34で走行方向への直交軸線回りに回転自在に支持され列をなし、各台車は駆動制御されるコンベヤ装置と連結支持部に設けられた接続部35をもち、台車列の一部の台車は直線走行路に沿った給電レールに接触する集電シュー37をもつコンベヤ装置駆動制御用の電源台車となり、その電力は、接続部で接続した集電シュー37とコンベヤ装置間をつなぐ電線L1,L4で供給され、他の台車には接続部のスリップリングで接続された台車間をつなぐ電線L3,L5で供給される。
(もっと読む)
121 - 140 / 206
[ Back to top ]