
Fターム[3F072GA03]の内容
特殊移送 (6,503) | 検出 (263) | 移送手段の移動検出、ストローク検出 (59) | 非接触式検出(フォトセンサー等) (41)
Fターム[3F072GA03]に分類される特許
1 - 20 / 41
ロータリー型袋詰め包装機
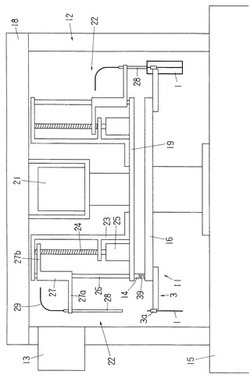
【課題】ガス吹込ノズル28が各グリッパー対3,3に対応して設置され、各グリッパー対3,3と同調して間欠回転するロータリー型袋詰め包装機。ガス吹込ノズル28の昇降動作及びグリッパー対3,3との相対位置関係を,包装製品の種類に応じて自在に調整できるようにする。
【解決手段】多数のグリッパー対3,3が設置された回転テーブル16の上方位置に、同調テーブル19を配置し、この同調テーブル19に各グリッパー対3,3に対応するガス吹込ノズル28を設置する。同調テーブル19は、回転テーブル16の駆動源から独立した第1サーボモータ21により、回転回転テーブル16と同軸で間欠回転する。同調テーブル19に、ガス吹込ノズル28を昇降させる第2サーボモータ25を、各ガス吹込ノズル28に対応して設置する。
(もっと読む)
物品搬送装置

【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
(もっと読む)
物品分類装置
【解決手段】 ストッカ7に載置された複数の分類トレイ6を、複数のトレイグループにグループ化し、さらに供給位置(排出ステーション13F)とストッカとの間に設けた中間ステージに上記ストッカの各トレイグループに対応する載置領域F1〜F5を設定する。
また中間ステージ4へと物品(LED素子1)を移載する第1移載手段5と、ストッカ7の所要の分類トレイ6へと物品を移載する第2移載手段8とを設けて、上記第1移載手段5が物品を中間ステージ4の所要の載置領域に移載すると、上記第2移載手段8は当該載置領域の複数の物品を保持して、上記ストッカ7の対応する分類トレイ6に移載する。
そして第2移載手段が物品をストッカの分類トレイに移載する間、上記第1移載手段は上記供給位置からの物品の取り出しを継続して行う。
【効果】 物品分類装置の稼働効率を高くすることが可能である。
(もっと読む)
ワーク搬送検査装置およびワーク搬送検査方法
【課題】検査手段に到達したワークに対し、検査工程を中断することなく連続的に検査を行なって、全体としての作業効率の向上を図る。
【解決手段】ワーク搬送検査装置は複数のワーク収納孔4を有する搬送テーブル2を備え、搬送テーブル2の周縁に沿って、分離供給部6と、方向判別部7と、方向変換部8と、検査部9と、分離排出部10とが設けられている。各ワーク収納孔4は搬送テーブル2の外縁から内側に向って搬送方向に直交して延びる第1孔4aと、搬送テーブル2の外縁に沿って第1孔4aと直交して延びる第2孔4bとを有し、T字形形状を有する。分離供給部6はワークWを第1孔4a内に収納し、第1孔4a内のワークWは方向変換部8によって外方へ移動した後、90°回転して第2孔4b内に収納される。検査部9は第2孔4b内に収納されたワークWのうち搬送テーブル2の外縁方向を向く面に対して特性検査が行なわれる。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
搬送装置
【課題】被搬送物を設定された複数の特定角度に切り換えることができる搬送装置を提供する。
【解決手段】回転自在に支承された被搬送物支持具12を設定された複数の特定ロック角度でロックするロック手段27とロック解除用被操作具29が設けられた搬送用走行体1の停止位置には、ロック解除用被操作具29に対して作用するロック解除操作手段40と被搬送物支持具12の回転駆動手段41とが併設され、回転駆動手段41は、被搬送物支持具12の回転軸心と平行な方向に出退移動自在な可動台43上に軸支された駆動用回転体44を備え、この駆動用回転体44には、その偏心位置から突設された駆動ピン45とセンサー46が設けられ、被搬送物支持具12側には、駆動ピン45が嵌合可能な駆動ピン嵌合部23と、この駆動ピン嵌合部23に駆動ピン45が嵌合する以前の駆動用回転体44の回転によりセンサー46が検出できる被検出部24が設けられた構成。
(もっと読む)
ターンテーブル装置
【課題】搬送装置とターンテーブルの駆動源を同一にして製造コストを低減することができ、さらに配線数を減らして設置費用を低減することができるターンテーブル装置を提供する。
【解決手段】ターンテーブル装置10は、チェーンコンベア11と、搬送用モータ17と、ターンテーブル40と、リフタ30と、搬送用モータ17の駆動力によって回転するシャフト20と、シャフト20の回転が伝達されて回転するとともに連結板41の上方に配置された回転体27と、を備える。回転体27は、リフタ30の上昇により連結板41に動力伝達可能に連結可能な位置であり、かつ回転体27の回転が連結板41の回転として伝達される位置に配置されている。そして、搬送用モータ17の駆動力がシャフト20及び回転体27を介して連結板41の回転として伝達され、連結板41の回転と共に天板43が回転するように構成されている。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
タバコ産業で使用される、ロッド状エレメントで充填された区画トレイの内容物の取り出しを行うためのデバイス
【課題】ロッド状エレメント(25)で充填した区画トレイ(2)の内容物の取り出しを行うためのデバイスであって、一つの平面内に平行に配置された、充填済トレイ(2)用の入口コンベア(1)及び空のトレイ(2’)用の出口コンベア(3)を有し、更に、支持プレート(6)が設けられた、トレイ(2)用の転向ユニット(4)と、トレイ(2’)用の転向ユニット(12)を有する、デバイスを提供する。
【解決手段】デバイスには、トレイ(2、2’)用の直線的輸送機(14)が設けられており、この直線的輸送機は、コンベア(1、3)の平面に対して垂直な平面に配置されている。直線的輸送機には、トレイ(2)用のグリップユニット(16)及びトレイ(2’)用のグリップユニット(17)が設けられている。輸送機(14)の下には、グリップユニット(16)の作動ゾーン内に、取出コンベア(24)が配置されている。この取出コンベア(24)の端部は、不動のスロート(27)の入口のところに配置されている。トレイ(2)用の転向ユニット(4)には、エレメント(5)で形成された支持プレート(6)が設けられている。これらのエレメントの数は、トレイ(2)の区画(8)の数と対応し、エレメント(5)間の距離は、トレイ(2)の内壁(9)の厚さと対応する。直線的輸送機(14)はガイド(15)を含み、このガイドに、二つのグリッパ(22、23)を持つキャリッジ(20、21)の形態の二つの別々のグリップユニット(16、17)が配置されている。スロート(27)の壁は移動可能であり、整合ユニット(29)を形成し、スロート(27)の下には移動可能支持体(30)が配置されている。取出コンベア(24)とアウトフィードコンベア(28)との間のスロート(27)の垂直壁(26)には、揺動バルブプレート(32)が設けられている。更に、デバイスには、トレイ(2’)の区画(8)のクリーニングを行うための機構(33)が設けられている。この機構(33)は、回転するように組み立てられたブラシ(34)を含む。これらのブラシは、出口コンベア(3)の始端ゾーンに、グリップユニット(17)の下に配置されている。
(もっと読む)
部品搬送装置及び部品搬送方法
【課題】部品の整列搬送を短時間で効率的に行うことができ、小型化も可能な部品搬送装置および部品搬送方法を提供する。
【解決手段】部品搬送装置1において、鉛直方向に対して傾斜した軸心を基準として回転自在に保持される搬送用回転体40と、搬送用回転体40上において周方向に複数形成される部品収容凹部42と、搬送用回転体40を軸心を基準に回転駆動する駆動装置であるモータ60と、部品収容凹部42の移動経路の下端側に配置され、部品がバルク状に貯留される部品貯留部22aと、を備えるようにし、搬送用回転体40の回転により、部品収容凹部42が、部品貯留部22aの部品を収容して搬送するようにした。
(もっと読む)
移載装置
【課題】移載対象物の撓みを抑制すると共に、移載能率の向上を図ることができる移載装置を提供する。
【解決手段】ガラス基板を搬送するハンド装置から受け渡されたガラス基板を支持すると共に、支持したガラス基板を搬送ライン2に移載する移載装置であって、ハンド装置の移動経路上に位置し、ガラス基板を支持する支持位置と、上記移動経路上から退避する退避位置との間を、互いに独立して駆動される複数の支持装置4を有するという構成を採用する。
(もっと読む)
ロータリー式容器処理装置
【課題】容器台32の回転によって、容器4とともに回転するトップロケータ44の回転に異常があった場合にこれを検出する。
【解決手段】容器4を載せてその底面を支持する容器台32とこの容器台32の上方に昇降可能に配置されたトップロケータ44と、容器台32を回転させるサーボモータ38とを備えており、トップロケータ44の下端に設けた回転自在な容器支持部60と容器台32とにより容器4を挟持した状態で容器4を回転させる。トップロケータ44の方向を向けた近接センサ72により、容器支持部60に設けた検出片74を検出し、所定時間内の検出回数を判定手段である制御装置76に送って、正常な回転をしているか否かを判定する。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
物品搬送装置
【解決手段】 自ら開閉作動をしないグリッパBを備えた上流側ホイールHaと、開閉機構を有するグリッパAを備えた下流側ホイールHbとを備え、両ホイールが相互に隣接する受け渡し位置において、グリッパBからグリッパAにペットボトル1を受け渡すようになっている。
ここで、上流側ホイールまたは下流側ホイールが異常停止すると、制御手段は下流側ホイールに設けられた退避手段Cを制御して、グリッパAを使用状態から退避状態に切り替え、グリッパAの第1、第2把持部材23、24の開度を使用状態における両把持部材の開度より大きくする。
これにより、上流側グリッパが把持するペットボトルと、第1、第2把持部材との干渉を防止することができる。
【効果】 設備を大型化することなく、一方のホイールが異常停止しても、他方のホイールを継続して運転することが可能である。
(もっと読む)
長尺ウレタン仕分け装置及び長尺ウレタン仕分け方法
【課題】切れ目が入れられた長尺ウレタン材料を所定長さの長尺ウレタン製品に切り離してから、各長尺ウレタン製品を仕分けて収容するまでの工程において、作業者の工数を減らすことが可能な長尺ウレタン仕分け装置を提供する。
【解決手段】切断装置により切断箇所に切れ目が形成された長尺ウレタン材料Aを載置する載置台1と、この載置台1に載置されている長尺ウレタン材料Aの各ブレード部分を個別に吸着するための複数の吸着ユニット51と、この吸着ユニット51を長尺ウレタン材料の長手方向に沿って移動させるためのボールネジ機構58と、切り離されたブレードを収容するための収容装置60と、この収容装置60に形成された所定の収容箇所に複数の吸着ユニット51を移動させるための駆動部と、所定の収容箇所にブレードを収容できるように、ボールネジ機構58、駆動部、吸着ユニット51の動作を制御する制御部と、を備えている。
(もっと読む)
選別装置
【課題】効率的で多機能化を図った選別装置を提供する。
【解決手段】インデックステーブルは、周縁部に設けられた複数のワーク収納溝と、基準となる溝番号に対応した検知用穴を備える。かかるインデックステーブルが搭載可能にされる。検知手段は、上記検知用穴を検知する。表示手段は、上記インデックステーブルに設けられたワーク収納溝番号の一覧と、上記検知手段からの検知信号に対応してパーツフィーダ部の溝番号を含む特定の位置の溝番号を表示する。操作パネルは、上記表示手段に表示された特定の位置の溝番号に対して特定の制御動作を設定する。制御部は、上記検知手段の検知信号を基に上記操作パネルにより設定された特定の位置の溝番号に対して特定の制御動作を行う。
(もっと読む)
口栓の方向規制装置
【課題】容器と口栓との間に一定の方向性が要求される場合に、口栓あるいは容器ないしそれら両者の方向規制のために適用される口栓の方向規制装置に関する。
【解決手段】
円盤状のフランジ部に水平な切り欠け部を有する口栓を口栓押さえと口栓受けで保持する口栓保持手段と、前記口栓受けを昇降させる昇降手段と、前記昇降手段を回転させる回転手段と、上昇を許容する弾性手段と、前記口栓保持手段のフランジ部の外周方向に、口栓の周方向の位置を検知する検知手段と、検知した信号により口栓の回転を停止させ、口栓の周方向の位置が規制される停止手段とを備えた口栓方向規制装置であって、前記回転している口栓のフランジ部の水平な切り欠け部を係止させ、検知する位相ツメを検知手段に備え、前記位相ツメで検知した信号により口栓の回転を停止させる電磁クラッチが停止手段に備えたられていることを特徴とした口栓の方向規制装置。
(もっと読む)
部品移行装置
【課題】 部品供給通路から送出された最先の部品と後続の部品との位置関係を正常に設定して、円滑で正確な部品移行が行える部品移行装置を提供する。
【解決手段】 部品供給通路6から送出された部品1を保持して目的箇所へ移行する移行ヘッド部材28が設けられ、この移行ヘッド部材28の所定位置に部品1を停止させる基準面が形成され、移行ヘッド部材28の所定位置に向かって移動しつつある最先の部品1に対して加速力を付与するとともに、最先の部品1と後続の部品1との間に間隔L1を形成する加速手段が設けられている。これにより、最先の部品1が保持凹部29内の所定位置に定着してから、後続の部品1が移動してくる。
(もっと読む)
ワーク搬送機構
【課題】ワーク(電子部品)に外力を加えることなく、ワークを供給位置に搬送することができるワーク搬送機構を提供する。
【解決手段】外周側に周方向に沿って所定ピッチでワーク保持手段を配置したターンテーブル11を備え、ターンテーブル11を回転させて各ワーク保持手段にて保持されている電子部品12を順次搬送するワーク搬送機構である。ワーク供給位置に供給すべき電子部品12がこのワーク供給位置に対して正規姿勢状態となる位置でターンテーブル11を停止する。
(もっと読む)
1 - 20 / 41
[ Back to top ]