
Fターム[3G093AA07]の内容
車両用機関又は特定用途機関の制御 (95,902) | 機関の用途 (9,333) | 車両用 (7,853) | 車両が電動機によっても駆動されるもの (3,262)
Fターム[3G093AA07]に分類される特許
401 - 420 / 3,262
ハイブリッド車両の制御装置
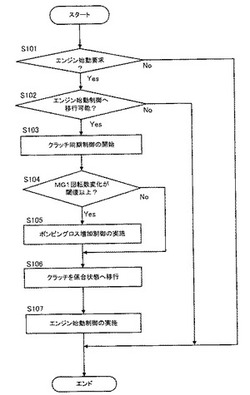
【課題】エンジン始動時にクラッチを係合する際に、エンジンが逆回転するのを抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、クラッチ同期制御手段と、ポンピングロス制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。クラッチ同期制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、エンジンの始動前に、第1回転電機のトルクに基づきクラッチの係合要素の回転を同期させる制御を行う。ポンピングロス制御手段は、上述の制御時に、ポンピングロスを大きくする制御を行う。
(もっと読む)
車両の動力伝達制御装置

【課題】EV走行可能なHV−MT車用動力伝達制御装置であって、クラッチペダルが操作されることなくシフトレバー操作がなされた場合にクラッチペダル操作を促すこと。
【解決手段】この装置の手動変速機は、変速機の出力軸に接続されたモータの駆動トルクのみによってEV走行するためのEV走行変速段(1速)と、クラッチを介したエンジンの駆動トルクによって走行するためのEG走行変速段(2速〜5速)とを備える。クラッチペダルが踏み込まれてEV走行変速段(1速)が選択された場合、その後においてMGトルクがアクセル開度及びクラッチストロークに基づいて制御されて車両が発進する(通常発進制御)。一方、クラッチペダルが踏み込まれずにEV走行変速段(1速)が選択された場合、MGトルクがゼロに維持され、且つ、運転者に警告がなされる。これにより、運転者はクラッチペダルの操作を促される。
(もっと読む)
ハイブリッド車両の表示装置
【課題】ハイブリッド車両の表示装置において、運転者によるアクセルの操作状態・解放状態を考慮して違和感のない表示を行う。
【解決手段】運転者が操作するアクセル21と、このアクセル21の操作状態ないし解放状態を検知するアクセル検知手段22と、動力源として内燃機関2および発電動機3とを備えたハイブリッド車両の表示装置13であって、発電動機3のトルク発生量を運転者に通知するハイブリッド車両の表示装置13において、アクセル検知手段22により検知されたアクセル21の操作時のみに発電動機3のトルク発生量が駆動側にあることを表示し、アクセル検知手段22により検知されたアクセル21の解放時のみに発電動機3のトルク発生量が回生側にあることを表示する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】第2モータ/ジェネレータの出力負担を軽減させること。
【解決手段】第1モータ/ジェネレータ20の回転軸21、エンジン10の出力軸11並びに第2モータ/ジェネレータ30の回転軸31及び駆動輪側に向けた出力軸50が各々連結されるサンローラ41、キャリア43及び第1ディスク44と、これらと共通の第1回転中心軸R1を有する第2ディスク45と、第2回転中心軸R2を有すると共に、サンローラ41、第1ディスク44及び第2ディスク45の夫々との間の接触部を介した動力伝達が可能で且つキャリア43に保持された遊星ボール42と、を有し、遊星ボール42の傾転角を変えることで、第1ディスク44の回転速度をサンローラ41の回転速度で除したプラネタリギヤ比ρの変更が可能な動力分割機構40を備え、要求駆動力の発生に要する第2モータ/ジェネレータ30の出力トルクが小さくなるようにプラネタリギヤ比ρを制御すること。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】SOCの値に対し、閾値A<B≦Cを設け、SOCの値が閾値A未満であるときには、電動機の回生トルクを制動力として利用し、SOCの値が閾値A以上であるときには、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用し、SOCの値が閾値A未満であり、電動機の回生トルクを制動力として利用しているときに、SOCの値が閾値B以上となったときには、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用し、SOCの値が閾値A以上、または閾値B以上であり、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用しているときに、SOCの値が閾値C以上となったときには、回生発電の電力の制限を開始する制御を行うハイブリッド自動車を構成する。
(もっと読む)
電気自動車の電源制御装置
【課題】車両の走行状態に応じて適切な電源を選択し、効率よく電動機の電源を使用することができるとともに、バッテリの劣化を防ぐことのできる電気自動車の電源制御装置を提供すること。
【解決手段】車両1が渋滞に突入している場合(S2)の充電時(S4)においては、キャパシタ充電率が上限値に達していない限り(S5)、電動機6の電源として電源選択部22によりキャパシタ20を選択することで、当該キャパシタに優先的に充電を行う(S6)。
(もっと読む)
ハイブリッド車両の制御装置およびハイブリッド車両の制御方法
【課題】発電機と発電機を駆動する内燃機関からなる複数の発電手段を備えるハイブリッド車両において、所望の出力を効率良く得る。
【解決手段】ハイブリッド車両の制御装置10は、各第1内燃機関(ENGa)11a、第2内燃機関(ENGb)11bおよび各第1発電用モータ(GENa)12a、第2発電用モータ(GENb)12bを有する複数の第1電源2、第2電源3と、走行用モータ(MOT)13に電力を供給するバッテリ(BATT)16を有する蓄電装置4とを備え、MG/BATECU34は、要求出力および蓄電状態、あるいは、要求出力または蓄電状態に応じた運転点で各第1内燃機関(ENGa)11a、第2内燃機関(ENGb)11bの運転を制御する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】第2モータ/ジェネレータの出力負担を軽減させること。
【解決手段】第1モータ/ジェネレータ20の回転軸21、エンジン10の出力軸11、駆動輪側に向けた出力軸50及び第2モータ/ジェネレータ30の回転軸31が各々連結されるサンローラ41、キャリア43、第1ディスク44及び第2ディスク45と、サンローラ41、第1ディスク44及び第2ディスク45の夫々との間の接触部を介した動力伝達が可能で且つキャリア43に保持された遊星ボール42と、を有し、遊星ボール42の傾転角を変えることで、第1ディスク44の回転速度をサンローラ41の回転速度で除した第1プラネタリギヤ比ρ1と第2ディスク45の回転速度をサンローラ41の回転速度で除した第2プラネタリギヤ比ρ2の変更が可能な動力分割機構40を備え、第2モータ/ジェネレータ30の回転トルクが小さくなるように第2プラネタリギヤ比ρ2を大きくすること。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、クラッチペダル操作に基づいて変化する内燃機関のトルク及び電動機のトルクのそれぞれの変化タイミングの間のずれの発生を抑制すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。MGトルクが、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方に調整される。摩擦クラッチの実際のミート開始点及び実際のリリース開始点が検出される。MGトルク制限値の決定に使用されるマップに使用されるクラッチのミート開始点及びリリース開始点が、検出された実際のミート開始点及び実際のリリース開始点に一致するように較正される。
(もっと読む)
車両の駆動力制御装置
【課題】 原動機と電動機とを駆動源として備える車両のHEV走行中において、プレシフトするときの所謂駆動力抜けを防止できる車両の駆動力制御装置を提供する。
【解決手段】 駆動力制御装置は、HEV走行中における奇数段から偶数段へのアップシフトのイナーシャ相t3〜t6中に、モータトルクTeを0にし、第1噛合機構SM1を、前段を確立させるギア列の駆動ギアと第1駆動軸との連結を断つニュートラル状態に切り替えた後、次段よりも変速比の小さい変速段を確立させるギア列の駆動ギアと第1駆動軸とを連結させる状態に切り替える。そして、第2クラッチトルクTc2をエンジンのイナーシャトルクが伝達されるようにTQ1からTQ4に上昇させ、0となったモータトルクTe分のトルクを補填する。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】先行車両への追従性や先行車両の追越し性を向上させることができると共に、燃費向上を図る。
【解決手段】車両用走行制御装置10のMG/BATECU36は、少なくともアクセル開度と車速と車間距離とからなる走行状態の履歴情報から各車速および車間距離毎の移動標準偏差を算出し、各移動標準偏差に応じて、少なくとも車速維持モードと車間距離維持モードと駆動力維持モードとのうちの何れの維持モードを選択するかを判定し、該判定の結果による維持モードから内燃機関11の運転点として定点運転または出力追従運転を導出する。
(もっと読む)
車両用駆動システム
【課題】モータ走行時における燃費を向上できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、エンジン2と、モータ6と、入力軸41および出力軸42の間の変速比を変更できる変速機4と、エンジン2および変速機4の入力軸41の間に配置されるクラッチ3と、モータ6の接続先を変速機4の入力軸41および出力軸42の間で切り替える接続切替装置7と、接続切替装置7を駆動制御する制御装置9とを備える。また、車両用駆動システム1は、エンジン2を動力源とするエンジン走行と、モータ6を動力源とするモータ走行とを切り替え得る。そして、制御装置9は、モータ走行中におけるアクセル開度θが所定の条件を満たすときに、接続切替装置7を駆動制御してモータ6の接続先を変速機4の入力軸41および出力軸42の間で切り替える。
(もっと読む)
車載機器
【課題】電力で走行する車両のエネルギー効率の良さをわかりやすく表示する車載機器を提供する。
【解決手段】電力で走行する車両に搭載された車載機器において、バッテリー充電時の電力料金に基づいて電力走行時のコストを算出する電力走行コスト算出部と、バッテリー充電時のガソリン価格に基づいてガソリンをエネルギー源にして走行したときのコストを推定するガソリン走行コスト推定部と、を備え、電力走行時のコスト61とともに、ガソリン走行時の推定コスト62を表示する。
(もっと読む)
ハイブリッド電気自動車の停車発電制御装置
【課題】車両停車中にバッテリのSOC低下に応じて停車発電制御を適切に実行でき、もって確実にバッテリのSOCを回復できるハイブリッド電気自動車の停車発電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてバッテリのSOCが充電判定値SOC0以上のときには(S10がNo)、インナクラッチC1及びアウタクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、SOCが充電判定値SOC0未満のときには(S10がYes)、電動機3側のアウタクラッチC2のみを接続状態に切り換え(S16)、停車発電制御により電動機3をジェネレータ作動させてバッテリ5を充電する(S18)。
(もっと読む)
作業車両
【課題】バッテリへの充電をより効率的に行うことにより、電動機を駆動源として行う作業を従来に比して早期にかつ長時間継続することができる作業車両を提供する。
【解決手段】作業用アクチュエータ3に作動油を供給する油圧ポンプPと、油圧ポンプPにPTO装置1を介して接続可能なエンジンEと、油圧ポンプPに連結されバッテリ5から供給される電力によって油圧ポンプPを駆動する電動機GMと、エンジンEまたは電動機GMのいずれかを油圧ポンプPの駆動源として切り換え選択するコントローラCと、を備える。電動機GMは、エンジンEが油圧ポンプPの駆動源として選択されている場合に、PTO装置1の作動によってバッテリ5に電力を蓄える発電手段として機能する。
(もっと読む)
ハイブリッド車両の高電圧バッテリ保護方法
【課題】ハイブリッド車両において走行中にモータ及びインバータシステムに故障が発生した場合、目標変速マップの変更による急激な変速を防止し、変速段の制限及びエンジンの速度制御によりモータの誤動作によるモータの高速回転に起因するバッテリの過充電状態を未然に防止できる高電圧バッテリ保護方法を提供する。
【解決手段】モータに故障が発生したか否かを確認するステップ102と、モータの故障発生時仮想の加速ペダル値を設定し現在の目標変速マップを固定するステップ104と、仮想の加速ペダル値を用いて現在の目標変速マップによる目標変速段を決定するステップ105と、モータの高速回転を防止するために予め設定されたエンジン速度の最大領域値と現在のエンジン速度とを比較してエンジン制御モードを変更または維持するステップ106とを含むことを特徴とする。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、様々な運転状況下で発生する駆動輪のスリップに対して各運転状況に応じた制御を行ない適切にスリップの抑制を行なう。
【解決手段】走行駆動源としてのエンジン1及びモータ3と、エンジン1とモータ3との間に介装されたクラッチ2と、駆動輪8の実スリップ率を算出するスリップ率算出手段60bと、駆動輪8のスリップが検出されたら、クラッチ2の断接状態と、車両の走行状態に基づいて、駆動輪8の目標スリップ率を設定する目標スリップ率設定手段60dと、駆動輪8のスリップが検出されたら、実スリップ率が目標スリップ率になるように走行駆動源の出力トルクを制御する出力トルク制御手段60eとを備える。
(もっと読む)
ハイブリッド電気自動車の充放電制御装置
【課題】車両停車中にゼロトルク制御が行われたときにSOC維持制御を適切に実行でき、もってバッテリのSOCを所定許容範囲内に保持することによりエネルギ効率が悪い強制充電や強制放電の実行を回避できるハイブリッド電気自動車の充放電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてゼロトルク制御を実行していないときには(S10がNo)、クラッチC1及びクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、ゼロトルクを実行中のときには(S10がYes)、電動機3側のクラッチC2のみを接続状態に切り換え(S16)、SOC維持制御を実行してバッテリ5のSOCを所定許容範囲内の中央値である50%近傍の狭い制御幅内で変動させる(S18)。
(もっと読む)
自動車コントロール法及び装置
【課題】従来技術における問題を解決する自動車用の改善されたコントロールシステムを提供することである。
【解決手段】自動車速度計算機10が、最も遅い車輪の速度または2輪以上の車輪の平均速度として自動車速度を算出して自動車速度値を決定する構成を有し、車輪スリップ量が各車輪速度を算出した自動車速度と比較して決定される。コントローラ14に所定の車輪スリップ閾値が保存され、第2出力信号としての車輪スリップ量信号16が車輪スリップ閾値と常に比較され、車輪スリップ緩和のためのトルク緩和を要する状況であるか否かが決定される。車輪スリップ量信号16の値が車輪スリップ閾値を上回ると車輪スリップ状況と認定され、パワートレーンから車輪への付加トルクが緩和され、かくして車輪スリップ開始が、またはそれ以上の車輪スリップ発生が防止される。
(もっと読む)
ハイブリッド車両のエンジン運転点追従システム及び方法
【課題】第1モータに対する速度制御の性能が低下した状態で、エンジン運転点追従性能を向上できるようにしたハイブリッド車両のエンジン運転点追従システム。
【解決手段】エンジンと、2個のモータと、2組の遊星ギアセットと、を含むハイブリッド車両のエンジン運転点追従システムであって、エンジン目標速度を第1モータの目標速度に変換するエンジン目標速度変化部と、第1モータの目標速度をトルク値に換算するPI制御部と、第1モータのトルク不足分をエンジントルク補償部にフィードバックするアンチワインドアップフィードバック部と、第1モータのトルク不足分をエンジントルク値に変換するトルク変換計算部と、換算されたエンジントルクを追加してエンジン目標トルクを補償し、エンジン運転点をエンジン目標速度に追従させるエンジントルク補償部と、を含んで構成されるハイブリッド車両のエンジン運転点追従システムを提供する。
(もっと読む)
401 - 420 / 3,262
[ Back to top ]