
Fターム[3G093DB03]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711) | 駆動輪の回転数(回転速度) (236)
Fターム[3G093DB03]に分類される特許
41 - 60 / 236
車両の特性評価システム及び制御システム、並びに騎乗型車両及びバンク車両の特性評価方法
【課題】発生トルク及びグリップ性能に関する特性を表す新規且つ作成容易な形態を提供する。
【解決手段】特性評価システム50が、車両1の動力源13の出力増減に対する要求を示す出力増減要求値を検出する出力要求検出手段51と、動力源13の出力により回転駆動される駆動輪3の空転の程度を表すスリップ値を測定するスリップ値測定手段52と、走行中における出力増減要求値とスリップ値との関係を車両特性評価値f1として記憶する評価値記憶手段53と、を備える。
(もっと読む)
トラクション制御装置、及びトラクション制御方法

【課題】 触媒の劣化を抑制することができるトラクション制御装置を提供する。
【解決手段】 トラクション制御装置18は、条件判定部46と、トラクション制御部47とを有する。条件判定部46は、監視値演算部45により演算された空転監視値Mが空転条件を充足するかを判定するトラクション制御部47は、空転条件を充足すると、4つの気筒の点火及び失火を夫々制御して前記駆動輪の駆動力を減少させるトラクション制御を実行する。トラクション制御部47は、トラクション制御の際、失火させる気筒を予め定められる制御規則に基づいて決定している。制御規則は、同じ気筒において、3回数以上連続して失火されないように設定されている。
(もっと読む)
車両の制御装置
【課題】燃料カットからの復帰時において、混合気の燃焼状態が不安定なときに生じるおそれのあるエンジンストールの発生を抑制することのできる車両の制御装置を提供する。
【解決手段】内燃機関10の出力軸10aは、ロックアップクラッチ機構14を備えるトルクコンバータ11を介してCVT12に接続されている。ECU18は、燃料カットの実行中の機関回転速度が復帰回転速度近傍の速度であってこの復帰回転速度よりも高い一定の速度に維持されるようにCVT12の変速比を制御する。そしてECU18は、燃料カット実行中の機関回転速度及び復帰回転速度を機関水温が低いときほど高い回転速度となるように変更する。
(もっと読む)
内燃機関の自動停止始動制御装置
【課題】エンジン10の自動停止処理の後、スタータ38を稼動させて自動始動処理を行うに際し、ブレーキアクチュエータ20や電動パワーステアリングシステム30の駆動に支障をきたすこと。
【解決手段】ブレーキ操作がなされる場合、自動停止処理およびその後の再始動処理がなされたと仮定した場合に、スタータ38の起動に伴う補機バッテリ38の最低電圧を予測する。予測された最低電圧に応じて、自動停止処理を実行するための閾値速度を可変設定する。詳しくは、最低電圧が低いほど、閾値速度を低下させる。車両の走行速度が閾値速度以下となることで自動停止処理を行う。
(もっと読む)
エンジンの制御方法及び制御装置
【課題】トルクコンバータ50の増幅効果が発進時と再加速時とで異なっていても、概ね同じような加速感が得られるようにエンジンEを制御する。
【解決手段】車両の乗員によるブレーキ操作が解除され(ステップS2)、発進或いは再加速が予測されるときには予めEGR率を低下させて、その後の発進或いは再加速時に速やかにエンジン出力が立ち上がるようにする(S7〜S9)。そうして発進或いは再加速が始まるのを待つ間、目標EGR制御は、車速が高いほど低くなるように補正する(S8)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時において、ドライバーの要求駆動力にレスポンスよく応え、ドライバーに違和感を与えない駆動力制御を行うことができるハイブリッド車両の制御装置を提供すること。
【解決手段】駆動系に、エンジンEng、第1クラッチCL1、モータ/ジェネレータMG、第2クラッチCL2、左右後輪RL,RRを備え、エンジン始動要求があるとモータ/ジェネレータMGをスタータモータとしてエンジンEngを始動する。このFRハイブリッド車両において、要求駆動力大の判定時、第1エンジン始動方法を選択し、要求駆動力大以外の判定時、第2エンジン始動方法を選択するエンジン始動方法選択制御手段(図5)と、エンジン始動制御が開始されると、直ちにモータ回転数制御を開始するモータ回転数制御手段(図6)と、第2エンジン始動方法の選択時、モータ/ジェネレータMGのモータトルク上限値を小さい値に制限するモータトルク制限制御手段(図8)と、を有する。
(もっと読む)
ハイブリッド駆動装置
【課題】エンジン始動後に、エンジンと回転電機との間に設けられるクラッチを完全係合させる際の係合ショックの発生を極力抑制することができるハイブリッド駆動装置を提供する。
【解決手段】クラッチを介してエンジンに駆動連結された回転電機と、エンジン及び回転電機の一方又は双方の駆動力を車輪に伝達する出力部材と、回転電機及びクラッチの動作制御を行う制御装置と、を備えたハイブリッド駆動装置。制御装置は、エンジンが停止され回転電機の駆動力が出力部材を介して車輪に伝達された状態でエンジンの始動要求があった場合に、エンジンの始動完了後にクラッチの解放状態でエンジンの回転速度を上昇させ、エンジンの回転速度が回転電機の回転速度よりも高くなった後に前記クラッチの係合を開始させる。
(もっと読む)
車両の制御装置
【課題】パワーモードが選択されている場合と通常モードが選択されている場合とで内燃機関の要求出力が同一となるときであれ、パワーモードが選択されている場合には通常モードが選択されている場合に比べて大きな加速感を得ることのできる車両の制御装置を提供する。
【解決手段】車両は、クランク軸16aの回転駆動力を回転出力軸6に伝達する際の変速比を無段階に変更するMG1を備える。また、HV−ECU30は、アクセル開度ACCPが全開とされるとき、目標回転速度NEtrgまで機関回転速度NEを上昇させる際に、パワーモードが選択されている場合には通常モードが選択されている場合に比べて、機関回転速度NEの上昇速度が大きくなるようにMG1の作動制御を実行する。
(もっと読む)
省燃費運転推奨装置
【課題】自動変速機の変速時に運転者に対して違和感を与えることを抑制することができる省燃費運転推奨装置を提供すること。
【解決手段】省燃費運転推奨装置11は、変速段指示信号に応じて変速段が変更される有段式の自動変速機14を備える車両に搭載されている。省燃費運転推奨装置11は、アクセルペダルの操作量及び自動変速機14の変速段に基づいて要求駆動力を算出し、その要求駆動力に基づいて車両の省燃費運転に関する判定を行い、その判定結果を通知する。省燃費運転推奨装置11は、エンジン12の出力制御を行うための出力制御用要求駆動力と省燃費運転状態にあるか否かを判定するための判定用要求駆動力とをそれぞれ算出する。判定用要求駆動力の算出に際しては、変速段を示すパラメータとして変速段指示信号とは異なる判定用変速段信号を用い、この判定用変速段信号を変速段指示信号が変更された後に変速段指示信号と同一になるように変更する。
(もっと読む)
車両の変速制御装置
【課題】自動変速機のマニュアルダウンシフト時の変速応答性と変速ショック抑制とを両立する。
【解決手段】自動変速機のマニュアルダウンシフトの際に、AT入力回転数の実際の変化量ΔNtfが目標変化量ΔNttに収束するように自動変速機の係合要素油圧(定圧係合圧)を学習制御する変速制御装置において、油圧学習制御による油圧学習値が下限ガード値に到達したのにも関わらず、目標変化量ΔNttを実現できない場合は、ブリッピング量(エンジンのトルクアップ量)を下げる側に補正(学習制御)することで、AT入力回転数の実際の変化量ΔNtfを目標変化量ΔNttに収束させる。
(もっと読む)
車両の制御装置
【課題】電動モータの脱調を防止し、バッテリ容量の復帰とともに電動モータの駆動を再開することができる車両の制御装置を提供する。
【解決手段】バッテリの残容量がバッテリ残容量判定値Qbd以下であり(ステップS13でYESと判定)、キャパシタの残容量がキャパシタ容量判定値Qcd以下である場合には(ステップS15でYESと判定)、電動モータに対する電圧の印加を停止し(ステップS16)、バッテリの容量がバッテリ復帰判定値Qbu以上に復帰した場合には(ステップS17でYESと判定)、電動モータに対する電圧の印加を再開することにより、電動モータの脱調を防止し、バッテリの容量の復帰とともに電動モータの駆動を再開することができる。
(もっと読む)
車両の制御装置および制御方法
【課題】補機の作動開始時の車両の加速および燃費の悪化を抑制する。
【解決手段】ECUは、定常走行中であって(S100にてYES)、補機作動中に(S102にてYES)、ガード値Eを設定するステップ(S104)と、今回のスイープアップ量SWP(I)を算出するステップ(S106)と、SWP(I)がガード値Eよりも小さい場合に(S108にてNO)、SWP(I)を最終的なスイープアップ量SWPとして更新するステップ(S110)と、SWP(I)がガード値以上である場合(S108にてYES)、ガード値Eを最終的なスイープアップ量SWPとして更新するステップ(S112)と、第3の要求量を算出するステップ(S114)と、算出された第3の要求量に基づいてCVTを制御するステップ(S116)とを含む、プログラムを実行する。
(もっと読む)
車両の制御装置
【課題】実際のエンジントルクに応じた態様でオートマチックトランスミッションなどを制御する。
【解決手段】ピッチングおよびバウンシングなどの車両の上下方向の振動を低減するトルクを出力するようにエンジンを制御する制振制御が実行される。制振制御を中断した場合、制振制御を中断した後のエンジントルクの挙動が予測される。予測されたエンジントルクの挙動に応じて、オートマチックトランスミッションの変速が制御される。
(もっと読む)
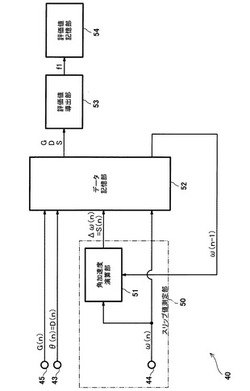
舶用エンジン制御システム
【課題】プロペラ流入速度の変動に合わせて、効率の高い回転数で主機を運転して燃費の向上を図る。
【解決手段】回転数指令と実測された主軸13または主機12の回転数NEの偏差をPID演算部16に入力して燃料噴射装置15から主機12へ供給される燃料の量をフィードバック制御する。プロペラ14へのプロペラ流入速度を検出し演算部17に入力する。プロペラ流入速度の変動に対応して制御ポイントが効率曲線に沿って移動するように回転数指令を修正する。
(もっと読む)
車両の異常判定装置
【課題】車両の加速度が目標よりも大きくなる異常を精度よく判定する。
【解決手段】エンジン1000は、設定された目標駆動力に応じて制御される。異常判定システム9300のトルク推定部9302は、エンジントルクTEを推定する。駆動力推定部9304は、推定されたエンジントルクに応じて車両の駆動力Fを推定する。第1判定部9310は、推定された駆動力Fと駆動力Fのしきい値SHFとを比較した結果に応じて、車両が異常であるか否かを判定する。
(もっと読む)
四輪駆動車両の駆動力制御装置
【課題】発進性の向上を図ることが可能な四輪駆動車両の駆動力制御装置を提供する。
【解決手段】四輪駆動車両の駆動力制御装置1は、エンジン2での発生トルクをトランスミッション30を介して主駆動輪1L、1Rで出力した場合の第1駆動力と、エンジン2での発生トルクにより発電機7で発電を行い、発電された電力によりモータを駆動させたときの発生トルクを従駆動輪3L、3Rで出力した場合の第2駆動力とのうち、どちらの駆動力が大きくなるかを判断する判断部と、判断部による判断結果に基づいて駆動力調整を行う駆動制御部とを備えている。
(もっと読む)
内燃機関の燃料噴射制御装置
【課題】燃料噴射量の学習制御を行う燃料噴射制御装置に対し、この学習制御の中止に伴って発生する燃焼音の増大を軽減する。
【解決手段】自動化マニュアルトランスミッションの変速要求が発生したタイミングで、単発噴射による燃料噴射量学習制御を禁止する。これにより、変速動作に伴うトルクアップ要求よりも早いタイミングで燃料圧力の低下動作を開始させることができ、高い燃料圧力で上記学習制御が行われていた場合であっても、上記トルクアップ要求に応じた燃料噴射時にあっては、比較的低い燃料圧力での燃料噴射が可能になる。その結果、燃焼音の増大を抑えることができる。
(もっと読む)
車両のクラッチ制御装置
【課題】ドグクラッチの断接時に、駆動輪の回転数変動により、ギヤ鳴り、破損、変速ショックの発生を抑制可能な車両のクラッチ制御装置を提供すること。
【解決手段】車両状態検出手段が検出する車両状態に応じて、自動変速機ATの変速を制御するとともに、自動変速機ATの変速中は、ドグクラッチ構造の第2クラッチCL2を切断状態とするとともに、変速終了後に、噛合状態とする指令を行なう統合コントローラ14を備えた車両のクラッチ制御装置であって、統合コントローラ14は、左右駆動輪LT,RTの回転速度の変化が、あらかじめ設定された変速制限状態である場合は、変速を制限する変速制限判定処理を実行することを特徴とする車両のクラッチ制御装置とした。
(もっと読む)
ハイブリッド走行制御装置
【課題】運転者の走行要求パワーとバッテリの充電要求パワーを合算したエンジン要求パワーがエンジンの燃費最良域を超える場合が多発しても、エンジンを効率よく動作させることのできるハイブリッド走行制御装置を提供する。
【解決手段】ハイブリッド車両1の制御を行う走行制御装置10において、アクセルペダル24から入力された走行要求パワーとバッテリの充電要求パワーとを合算したエンジン要求パワーを求める要求パワー演算手段と、要求パワー演算手段から得られたエンジン要求パワーがエンジンの燃費最良域を超える場合には、バッテリの充電要求パワーを制限する充電制限手段と、を有する。
(もっと読む)
車両の駆動トルク制御装置
【課題】エンジンにより駆動される補機の機能への影響をできるだけ抑えつつ車両の駆動トルクが所要の値になるようエンジンの出力トルク及び補機の消費トルクを制御する。
【解決手段】車両の目標駆動トルクTvtが演算され(ブロック100〜120)、目標駆動トルクの低周波成分がエンジン14の目標制御トルクに分配されると共に、低周波成分以外の目標駆動トルクの成分が補機としてのコンプレッサ34及びオルタネータ36の目標制御トルクに分配される(ブロック130)。そしてエンジンの目標制御トルクTetと補機の必要消費トルクTcreq、Tareqとの和に基づいてエンジンの出力トルクが制御され、補機の必要消費トルクより補機の目標制御トルクを減算した値に基づいて補機の消費トルクが制御される(ブロック150〜180)。
(もっと読む)
41 - 60 / 236
[ Back to top ]