
Fターム[3G093DB03]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711) | 駆動輪の回転数(回転速度) (236)
Fターム[3G093DB03]に分類される特許
21 - 40 / 236
車両およびその制御方法
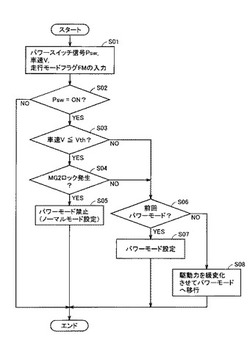
【課題】ノーマルモードおよびパワーモードのいずれかを運転者が選択可能に構成された車両において、運転者の意図しない駆動力が発生するのを抑制する。
【解決手段】車両は、第1の走行モードと、同一アクセル操作量に対する車両駆動力が第1の走行モードよりも大きい第2の走行モードとのいずれかを運転者により選択可能に構成される。車両は、運転者からの第2の走行モードへの切換え要求を検知するための検知手段と、切換え要求が検知された場合に、第1の走行モード時と比較して車両駆動力を増大させることにより、車両を第2の走行モードへ切換えるための切換え手段と、切換え要求が検知された場合に、車輪のロック状態を検出するためのロック検出手段と、車輪のロック状態が検出されたときには、切換え手段による第2の走行モードへの切換えを禁止するための禁止手段とを備える。
(もっと読む)
ハイブリッド車両の制御装置

【課題】エンジン動作点の移動及び機械式変速機構の変速制御を同時に行う際、燃費の悪化を抑制しつつ好適な変速を実現する。
【解決手段】第2電動機回転速度NMG2が上昇から下降に転じた後に第2電動機回転速度NMG2が自動変速機18の変速後における第2電動機回転速度NMG2と同期するまでの間は一時的に、エンジン回転速度NEの低下勾配を零にするので、エンジン回転速度NEの目標値を跨ぐ吹き上がり方がどれだけばらついても、エンジン回転速度NEの低下勾配のばらつきが確実に回避される。従って、エンジン回転速度NEの低下勾配が一時的に零とされている期間での自動変速機18の変速制御を安定して実行することができる。また、第2電動機回転速度NMG2の同期後にエンジン回転速度NEを目標回転速度に向かって低下させる制御を単独で実行することができ、目標回転速度への収束時間のばらつきが抑制される。
(もっと読む)
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
(もっと読む)
車両用走行制御装置
【課題】コースト状態においてエンジンの始動と変速の制御とをより適切に行うこと。
【解決手段】駆動源となるエンジンおよびモータと、駆動源からの駆動力を異なるギヤ比で車輪に伝達する変速機と、エンジンの始動を制御するエンジン始動制御手段と、変速機の変速を制御する変速制御手段と、自車両がモータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生しているか否かを判定する始動判定手段と、を備え、始動判定手段が、自車両が前記モータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生していると判定した場合に、エンジン始動制御手段は、変速制御手段が現在の変速段から目標変速段に掛け替えを完了するまでエンジンの始動を禁止し、該掛け替えの完了後に、エンジンを始動させる。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間のトルク伝達を断接する摩擦係合要素における目標伝達トルク容量の補正精度を向上することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ(モータジェネレータ)2と駆動輪(タイヤ)7,7の間に介装され、モータ2と駆動輪7,7との間のトルク伝達を断接する摩擦係合要素(第2クラッチ)5における目標指令値(目標伝達トルク容量)を設定する際、補正量演算手段(補正量演算部)401Bにより、目標指令値の補正量を、摩擦係合要素5への入力トルク(推定モータトルク)が増大するほど大きな値に設定する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
車両制御装置
【課題】運転者の意図に即した走行と燃費の向上を両立させることのできる車両制御装置を提供する。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化より遅くする指標設定手段(ステップS2)を有し、前記車両の駆動力源の出力を制御することに伴って、予め定めた範囲内で駆動力源の燃費エネルギ効率を変化させるように、前記指標に基づいて走行特性を補正設定するように構成された制御器(ステップS8)を備えている。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
惰行制御装置
【課題】乗り心地を向上させ、ドライバーの不快感を低減することが可能な惰行制御装置を提供する。
【解決手段】惰行制御中は惰行許可フラグをオフにし、惰行制御中でなく、かつ惰行制御終了条件が成立したときに惰行許可フラグをオンにする惰行許可フラグ制御部6を備え、惰行制御実行判定部5は、惰行許可フラグがオンであるときのみ惰行制御を開始するようにされる。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
車両の制御装置
【課題】エンジンE等の動力源から駆動輪3への動力伝達経路において少なくとも一対の動力伝達部材が互いに遊びをもって係合している場合に、その係合部分の遊びに起因してショックが発生することを、大幅なコストアップを招くことなく判定できるようにする。そのショックを抑えるように車両を制御して、乗り心地を向上させる。
【解決手段】遊びのある係合部分よりも動力伝達上流側にある入力軸24の回転速度Viの変化率から、その係合部分における動力伝達部材同士の非接触状態を判定する第1判定部61と、入力軸回転速度Vi及び後輪回転速度Vrの回転速度差Vから非接触状態を判定する第2判定部62と、非接触状態が判定されたときに前記係合部分の下流側及び下流側の回転速度差Vが小さくなるように、車両を制御する制御手段63と、を備えている。
(もっと読む)
惰行制御装置
【課題】惰行制御中のアクセル開度の変化幅が大きい運転者に対してもアクセル開度の変化幅が小さい運転者と同等に惰行制御が実施できる惰行制御装置を提供する。
【解決手段】アクセル開度の変化幅を学習し、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が大きいときには惰行制御可能領域CAを拡大させ、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が小さいときには惰行制御可能領域CAを縮小させる惰行制御可能領域調節部4を備える。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】駆動輪の状態がスリップ状態とグリップ状態との間で変化する場合に駆動用回転電機において急激に発生する余剰電力を効率よく消費する。
【解決手段】HV−ECUは、余剰電力が発生し(S100にてYES)、発生した余剰電力がしきい値を超えていた場合であって(S102にてYES)、かつ、触媒温度が予め定められた値Ta以下である場合(S104にてYES)、EHCのオン時間を設定するステップ(S106)と、EHCをオンするステップ(S108)と、オン時間が経過した場合に(S110にてYES)、EHCをオフするステップ(S112)と、余剰電力がしきい値以下である場合(S102にてNO)、あるいは、触媒温度が予め定められた値Taよりも大きい場合(S104にてNO)、発生した余剰電力をバッテリで吸収する処理を実行するステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
車両の操舵時挙動改善装置
【課題】操舵時におけるヨーイング挙動の線形性およびロールの抑制を、サスペンション装置の変更なしに実現する。
【解決手段】モータ駆動トルクを操舵開始時t1から所定時間TM1sが経過するt2までの間、目標モータトルクよりも実線波形で示す量だけ増大された値に補正し、t2から所定時間TM2sが経過するt4までの間、目標モータトルクよりも実線波形で示す量だけ減少された値に制御する。t2〜t4間のモータトルク減少補正は車両のロール速度を速くする内外輪荷重変化を生じさせ、内外輪側ショックアブソーバ・ストローク速度VsaboutおよびVsabinが、モータトルク減少補正非実行時のVsabin'およびVsabout'よりも速くなる。これによりショックアブソーバの振動減衰力が大きくなり、当該期間においてロール角を小さくでき、操舵中の車体ロール感を改善することができる。
(もっと読む)
制御装置
【課題】直結クラッチの係合状態において変速を行なう際に、直結クラッチの係合圧を適切に制御することにより、回生発電効率の悪化及びトルクショックの発生を防止する。
【解決手段】内燃機関及び回転電機に駆動連結される入力部材と、車輪に駆動連結される出力部材と、入力部材の回転を変速入力部材へ伝達する直結クラッチ付きの流体継手と、変速入力部材の回転を変速して出力部材に伝達する変速機構と、を備えたハイブリッド車両用駆動装置の制御を行なう制御装置であって、制御装置は、直結クラッチの係合圧が滑りを生じない直結限界係合圧以上の状態から、変速を行う際に、入力要求トルクが正トルクの状態でダウンシフトを行なう場合は、直結クラッチの係合圧が直結限界係合圧未満となるように制御し、入力要求トルクが負トルクの状態でダウン又はアップシフトを行なう場合は、直結クラッチの係合圧が直結限界係合圧以上となるように制御する。
(もっと読む)
車両制御システム
【課題】適正に回生を行うことができる車両制御システムを提供することを目的とする。
【解決手段】内燃機関6が発生させる動力と電動機7が発生させる動力とを変速機10で変速して車両2の駆動輪3に伝達可能である駆動装置4と、電動機7を制御して回生を実行可能であると共に、車両2に対する加速要求操作のオフに伴って、電動機7による回生効率が向上すると予測される変速比への変速を実行したと仮定した場合の電動機7による回生の変速実行時回生効率に応じて、変速機10による変速を実行する制御装置5とを備えることを特徴とする。
(もっと読む)
車両制御システム
【課題】燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】エンジンと、エンジンの出力する動力を車両の駆動輪に伝達する自動変速機とを備え、エンジンの出力トルクと回転数との関係を示す予め定められた所定動作線と、車両の加速度に関する目標値とに基づいてエンジンの目標トルクおよび自動変速機の目標変速比を決定し(54)、かつエンジンに目標トルクを実現させる指令であるトルク指令、あるいは自動変速機に目標変速比を実現させる指令である変速指令の少なくともいずれか一方に遅れ補償を施して出力する(54−56−58A,54−57−58B)ことが可能である。遅れ補償は、出力トルクおよび回転数を示す動作点が目標トルクおよび目標変速比に対応する目標動作点まで変化する過程において、遅れ補償が施されない場合よりも、動作点が所定動作線から離れることを抑制するものである。
(もっと読む)
車両の制御装置
【課題】回生コースト変速期間にブレーキオン操作がなされた場合におけるドライバビリティの低下を抑制する。
【解決手段】入力軸(600)との間でトルクの入出力が可能な回転電機(MG2)と、当該入力軸と車軸に連結された出力軸(700)との間に少なくとも一つの係合装置を備え、入力軸と出力軸との間でトルクを伝達すると共に当該係合装置の係合状態に応じて入力軸の回転速度と出力軸の回転速度との比たる変速比を変化させることが可能な変速装置(400)とを備えた車両(1)を制御する装置(100)は、制動操作を検出可能な検出手段と、車両のコースト回生時に変速装置のダウンシフトがなされるコースト回生変速期間において上記制動操作としてブレーキオン操作が検出された場合に、コースト回生変速期間における回転電機の回生トルクの増加を抑制する回生制御手段とを具備する。
(もっと読む)
車両の特性評価システム及び制御システム、並びに騎乗型車両及びバンク車両の特性評価方法
【課題】発生トルク及びグリップ性能に関する特性を表す新規且つ作成容易な形態を提供する。
【解決手段】特性評価システム50が、車両1の動力源13の出力増減に対する要求を示す出力増減要求値を検出する出力要求検出手段51と、動力源13の出力により回転駆動される駆動輪3の空転の程度を表すスリップ値を測定するスリップ値測定手段52と、走行中における出力増減要求値とスリップ値との関係を車両特性評価値f1として記憶する評価値記憶手段53と、を備える。
(もっと読む)
21 - 40 / 236
[ Back to top ]