
Fターム[3G093FA07]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御部の特徴 (6,324) | 演算部内での処理 (5,972) | 帰還制御 (2,284) | 目標値の変更・補正 (928)
Fターム[3G093FA07]に分類される特許
81 - 100 / 928
車両の駆動装置
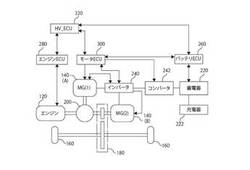
【課題】エンジンの冷却水温が低い場合のエンジンの始動性を確保出来る車両の駆動装置を提供すること。
【解決手段】エンジン120と、蓄電器220と、蓄電器220から電力の供給を受けてエンジン120を始動するモータ140Aと、エンジンの冷却水温と回転数とに応じてエンジン120始動時の燃料噴射量を算出する車両の駆動装置であって、エンジン始動時に、エンジンの冷却水温が判定値未満の場合は、モータ140Aの出力を制限する。
(もっと読む)
車両停止補助装置

【課題】 アイドリングストップ時に車両の停止状態を維持する車両停止補助装置を提供する。
【解決手段】 アイドリングストップを実行する車両においてECUは車両停止補助処理を実行する。車両停止補助処理では、車両速度が0であり(S101)、かつパーキングブレーキが解除されており(S102)、かつブレーキ圧が閾値以上であり(S103)、かつアクセル開度が第1閾値以下である場合(S104)、ECUはマニュアルバルブのシフトレンジをパーキングレンジへ切り換える(S106)。その後、エンジンを停止する(S107)。エンジン停止後、運転者が操作するアクセル開度が第1閾値より小さい第2閾値以上になる(S108)とエンジンは再始動する。運転者が操作するアクセル開度が第1閾値以上になる(S110)とマニュアルバルブのシフトレンジをドライブレンジに変更する。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
車両用駆動装置の制御装置
【課題】自動変速機の変速に伴ってロックアップクラッチがスリップ制御状態から開放制御状態へと変更されることによりドライバビリティおよび車両燃費が低下することを、抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】自動変速機12の変速段毎に予め記憶された複数種類の関係のうちの前記変速段に応じて選択された関係から、アクセル開度Accに基づいてスロットル開度TAPを決定する電子制御装置58であって、ロックアップクラッチ56が変速前後で共にスリップ制御領域内であるときに自動変速機12を変速させる場合には、変速から所定の待機時間T1が経過するまでの間は前記変速前のスロットル開度TAPを維持し、前記変速から前記待機時間T1が経過した後は、スロットル開度TAPを前記変速後の変速段に対応する関係で決まった値へ向かって連続的に変化させる。
(もっと読む)
ハイブリッド車両のエンジン始動制御装置
【課題】エンジン始動時にエンジンがフリクションに対してトルクを十分に出力させることのできるハイブリッド車両のエンジン始動制御装置を提供する。
【解決手段】ハイブリッド駆動系の第1,第2クラッチ4,5とモータジェネレータ2とエンジン1とを制御する統合コントローラ20と、バッテリ温度センサ402と、エンジン水温センサ401と、を備えたハイブリッド車両のエンジン始動制御装置600であって、統合コントローラ20は、バッテリ温度センサ402またはエンジン水温センサ401が検出する温度が所定の低温以下のとき、モータジェネレータ2の目標回転数を所定の低回転数に設定して前記エンジンを低回転で回転させた後に、その目標回転数を所定の高回転数に設定して前記エンジンを高回転させる際、前記エンジンの目標回転数をその高回転数より高い回転数に設定する。
(もっと読む)
車両用走行制御装置
【課題】燃費性能を向上させること。
【解決手段】動力源としてのエンジン10と当該エンジン10の動力を駆動輪WL,WRに伝える動力伝達装置とを備えた車両の走行状態を制御する車両用走行制御装置において、自車の所定距離先までの間の走行路の勾配を把握し、その所定距離先でも自車が加速を続ける可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が可能な状態のまま当該エンジン10への燃料の供給量を減少させ又は当該燃料の供給を停止させた惰性走行を行い、自車が前記所定距離先を超えるまでに減速し始める可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が断たれるように動力伝達装置の動力断接部(ロックアップクラッチ35と入力クラッチC1の内の少なくとも1つ)を制御して前記惰性走行を行うこと。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の蓄電割合が大きく低下するのを抑制する。
【解決手段】補機90の消費電力が小さいほど大きくなる傾向に始動用閾値Pstartおよび停止用閾値Pstopを設定し、エンジン22から動力を出力しながら走行するときには、補機90の消費電力が小さいほど車両に要求される車両要求パワーPv*に比して大きくなる傾向にエンジン22から出力すべきエンジン要求パワーを設定し、設定したエンジン要求パワーがエンジン22から出力されると共に走行に要求される要求トルクによって走行するようエンジン22とモータMG1,MG2とを制御する。
(もっと読む)
車両用安全装置
【課題】本発明はシートベルトが必ず装着され、且つ、走行中の運転者や同乗者の安全確保が可能な車両用安全装置を提供することを目的とする。
【解決手段】シートベルト1を装着した時のみエンジン8が始動する車両用安全装置に於いて、車両の走行中にシートベルト1のプレート11を外した時にスローダウンする減速手段4を少なくとも備えた構造とする。また走行中にシートベルト1の未装着状態が設定時間経過すると、光や音を発する警告手段5が備えられると良く、又、検知手段2としてスイッチを用い、且つ、減速手段4が、車両の走行中にプレート11を外してスイッチ2が切られた時にスローダウンするために燃料カットする指令を出す減速制御部41を介し、エンジン8のECU7内部に設けた燃料噴射制御部71に接続されたものとするのが好ましい。
(もっと読む)
車両制御装置
【課題】自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供すること。
【解決手段】車両1の動力源としてのエンジン11と、エンジンと車両の駆動輪16との間に配置され、かつ係合度合いを制御可能なクラッチ3と、を備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。係合度合いの制御において、クラッチは、例えば半係合状態とされる。
(もっと読む)
動力伝達装置
【課題】燃費の向上、騒音の低下、及びヒートバランス性能の向上を図るとともに、エネルギー効率の向上を図ることが可能な動力伝達装置を提供する。
【解決手段】バッテリ60と、駆動状態、又は発電状態に切換可能なモータジェネレータ50と、少なくとも1つの負荷と、モータジェネレータ50を、前記発電状態、又は前記駆動状態のいずれかに切り換えるインバータ70と、バッテリ60の充電量Cを検出する充電状態検出手段117と、前記負荷の吸収馬力Lpを検出する吸収馬力検出手段110と、吸収馬力検出手段110により検出される吸収馬力Lp及び充電状態検出手段117により検出されるバッテリ60の充電量Cに基づいて、インバータ70によりモータジェネレータ50を前記発電状態、又は前記駆動状態のいずれかに切り換える制御装置(メインコントローラ100)と、を具備。
(もっと読む)
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
車両用発電制御装置
【課題】回生発電時に効率よく蓄電装置に充電しつつ、発電トルク変化によるドライバビリティの悪化を防止する.
【解決手段】蓄電装置12の推定充電率が目標充電率より低い場合には、蓄電装置の推定充電率が目標充電率となるよう発電機10の発電制御を行う通常発電制御手段と、車両の減速中でかつ内燃機関の燃料供給を停止している期間に、発電機の発電制御を行う回生発電制御手段とを備えた車両用発電制御装置において、車速に応じて減速時の回生発電における充電量を予測する回生時充電量予測手段を備え、回生時充電量予測手段で求めた回生時予測充電量の増加に伴って蓄電装置12の目標充電率を低下させるとともに、回生発電制御手段は、発電機において蓄電装置への充電有無で発電に必要となるトルクの差が所定トルク差以内となるよう発電量を減少する方向に制限する。
(もっと読む)
ハイブリッド車両のバッテリー保護方法およびその装置
【課題】高速走行中にモータの故障が発生した場合、高電圧バッテリーに過充電が起こらないようにするハイブリッド車両のバッテリー保護方法およびその装置を提供する。
【解決手段】バッテリーの電源としてモータを選択的に駆動させ、モータの駆動によって発生した電気によってバッテリーを選択的に充電させるハイブリッド車両のバッテリー保護方法であって、モータが設定された一定速度以上の速度で運転されているかを判断する段階、モータの故障が発生したかを判断する段階、モータが一定速度以上の速度で運転する状態でモータの故障が発生すれば、過充電防止変速マップを適用して目標変速段を決める段階、および目標変速段に変速を実行する段階を含むことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 運転者の要求する走行状態を応答よく実現可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 ハイブリッド車両が車速指令値に基づいて走行制御をしているモータ走行モードにおいて、駆動トルク指令値に運転者が所定加速を要求したときの加速用駆動トルクを加算した値がモータ駆動分上限値を越えたときはエンジン併用走行モードを選択することとした。
(もっと読む)
車両の駆動力制御装置
【課題】 アクセルオフによりドライブ走行からコースト走行へ移行する際のショックの緩和と空走感の抑制とを両立できる車両の駆動力制御装置を提供する。
【解決手段】 目標駆動力tFoを算出する目標駆動力演算部30と、推定駆動力Fo^を算出する実駆動力推定手段と、目標駆動力tFoと推定駆動力Fo^との偏差である駆動力偏差ΔFoが減少方向に変化している場合、目標駆動力tFoが所定のトルク閾値Fo_th未満のときには目標駆動力tFoがトルク閾値Fo_th以上のときよりも目標駆動力tFoの変化率を大きく制限する駆動力変化率制限部61と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両の燃費の向上を図る。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両がEV走行モードで走行している場合において、要求駆動力が所定の閾値になったときに、内燃機関をクランキングするように第1回転電機を制御する始動手段と、内燃機関の停止中にクランク位置を検出するクランク位置検出手段と、内燃機関がクランキングされる前に、検出されたクランク位置に基づいて、クランク位置が目標クランク位置となるように第1回転電機を制御するクランク位置制御手段とを備える。更に、検出されたクランク位置に基づいて内燃機関の始動に要する始動時間を推定し、該推定した始動時間に応じて、内燃機関の始動完了時にバッテリから第1及び第2回転電機に供給される電力がバッテリの出力制限に近づくように、所定の閾値を変更する閾値変更手段を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時における第2クラッチの締結防止によるショック低減と、バッテリの劣化防止と、の両立を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、バッテリ電力制限拡大制御手段(図12)と、を備える。モータジェネレータ2は、バッテリ8からの電力により駆動する。第1クラッチ4は、エンジンとモータジェネレータ2の間に介装され、モータジェネレータ2をスタータモータとするエンジン始動時に締結される。第2クラッチ5は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。バッテリ電力制限拡大制御手段(図12)は、エンジン始動時、最もモータトルクが必要な状態を含むエンジン始動領域を検知すると、通常時のバッテリ電力制限を一時的に拡大する電力制限拡大要求を出す。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン停止要求時のエンジン回転速度に応じた適正な停止制御を実行して、エンジン回転停止制御の精度を向上させる。
【解決手段】エンジン停止要求時のエンジン回転速度が判定閾値よりも高い場合には、エンジン回転が停止するまでの期間が比較的長くなるため、オルタF/B停止制御を実行する期間を確保できると判断して、実エンジン回転挙動を目標軌道に合わせるようにオルタネータ33の負荷トルクをフィードバック制御するオルタF/B停止制御を実行する。一方、エンジン停止要求時のエンジン回転速度が判定閾値以下の場合には、エンジン回転が停止するまでの期間が比較的短くなるため、オルタF/B停止制御を実行する期間を確保できないと判断して、エンジン11の燃焼停止前に実エンジン回転挙動を目標軌道に合わせるように点火時期をフィードバック制御する点火F/B停止制御を実行する。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン回転停止制御の際に低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度とが頻繁に切り替わるハンチング現象の発生を防止する。
【解決手段】エンジン回転停止制御の際に、低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度との切り替えにヒステリシスを持たせる。具体的には、低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度との間に設定される切替判定値を含むようにヒステリシス領域を設定し、実エンジン回転速度がヒステリシス領域外の場合には実エンジン回転速度を切替判定値と比較して低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度のうちの一方を選択し、実エンジン回転速度がヒステリシス領域内の場合には低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度のうちの前回と同じ側の目標エンジン回転速度を選択する。
(もっと読む)
81 - 100 / 928
[ Back to top ]