
Fターム[3J062CB33]の内容
伝動装置 (28,056) | リンク、レバー等による伝動装置の特徴 (1,496) | リンク機構の入力 (177) | 複数入力 (58)
Fターム[3J062CB33]に分類される特許
1 - 20 / 58
リンク作動装置
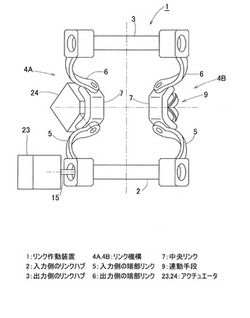
【課題】 外径寸法が小さいコンパクトな構成であり、拘束、支持、案内等をする物とリンク機構との接触を回避しやすいリンク作動装置を提供する。
【解決手段】 リンク作動装置1は、入出力側にそれぞれ配されたリンクハブ2,3と、二組のリンク機構4A,4Bとを有する。リンク機構4A,4Bは、四つの回転対偶からなる三節連鎖のリンク機構であり、リンクハブ2,3に対して回転可能に端部リンク5,6を連結し、入力側および出力側の端部リンク5,6を中央リンク7に対して回転可能に連結してなる。一組のリンク機構4Bに、入力側の端部リンク5と出力側の端部リンク6とを互いに連動して回転変位させる連動手段9を設ける。一組のリンク機構4Aに、回転対偶の回転角を任意に変更可能か、または二つのリンク機構構成部材間の相対距離を変更させる二つ以上のアクチュエータ23,24を設ける。
(もっと読む)
リンク作動装置

【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 基端側のリンクハブ14に対し先端側のリンクハブを、3組以上のリンク機構11〜13を介して姿勢を変更可能に連結する。そのうちの少なくとも2組に、端部リンク部材11a〜13aを回動させて基端側のリンクハブ14に対して先端側のリンクハブの姿勢を任意に変更させるアクチュエータ30と、その動作量を端部リンク部材11a〜13aに減速して伝達する減速機構31とを設ける。減速機構31は、アクチュエータ30の駆動で回転させられる小歯車36と、端部リンク部材11a〜13aに設けられた大歯車37との噛み合いからなる歯車式の減速部33を有する。大歯車37のピッチ円半径は、端部リンク部材11a〜13aのアーム長Lの1/2以上とする。
(もっと読む)
無段変速機構及び自動車用駆動システム
【課題】変速比を維持するためのアクチュエータの消費電力の低減を図る。
【解決手段】第1リンクLn1を固定節、第2リンLn2クを原動節、第3リンクLn3を従動節とする複数の4節リンク機構の組み合わせとして構成される。固定長の第5、第6リンクLn5、Ln6の動きにより、第2リンクLn2の長さ(偏心量)を調節して第4リンクLn4の揺動角度を変え、それにより、第2リンクLn2の回転運動を第4リンクの揺動運動を介してワンウェイ・クラッチにより回転運動に変換する際の変速比を調節する。制御手段5は、第2リンクLn2の入力回転方向において、第5、第6リンクLn5、Ln6の連結点Oxが第2リンクLn2に相当する線よりも後側に位置するように、第5リンクLn5と第6リンクLn6にアクチュエータにより回転トルクを与えて第2リンクLn2の長さを調節する。
(もっと読む)
アクチュエータデバイス
【課題】本発明は、ソレノイドの代替となり、動作時の音が無く、しかも小型・軽量で動
作が速く、3つの停止位置を有するアクチュエータデバイスを提供する。
【解決手段】軸12を中心に回動可能で、軸12を中にして一方側と他方側とに設けられた第1と第2の端部9d・9eを有する作動アーム9と、第1の端部9dと第1の固定部材3との間に直列に繋がれて架渡された第1のアクチュエータ素子10及び第1の弾性体6と、第2の端部9eと第2の固定部材5との間に直列に繋がれて架渡された第2のアクチュエータ素子11及び第2の弾性体7と、第1のアクチュエータ素子10に通電した状態と、第2のアクチュエータ素子11に通電した状態と、いずれにも通電しない状態に制御する制御手段100・200と、を有することを特徴とする。
(もっと読む)
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
無段変速機
【課題】簡易な構造で出力軸を360度回転させることが可能な無段変速機を提供する。
【解決手段】無段変速機は、少なくとも平面内で枢動可能に支持されているクランク24と、クランク24上に滑動可能に支持されている支点22と、支点22を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、を備える。駆動部は、支点22に対して枢動可能に連結された少なくとも二本のリンク部材12、14と、リンク部材の長さを伸縮させる伸縮機構とで構成される。リンク部材12、14の伸縮により支点22を移動させて、クランク24上での支点22の位置とクランク24の角度とを変えることで、クランクの回転と減速比とを制御する。
(もっと読む)
多自由度位置決め装置および多自由度位置決め方法
【課題】簡易な構成で、エンドプレートおよびツールや治具の重量を支えることができ、また、駆動電流による発熱を抑制し、作業を行う際の駆動力を確保する。
【解決手段】ベースプレート2とエンドプレート4との間に接続された複数のリンク3と、各リンク3に取り付けられ、リンク3を駆動させるアクチュエータ6と、ベースプレート2とエンドプレート4との間に接続され、定常位置でのエンドプレート4およびエンドプレート4に取り付けられた物体の重量を支える重力補償装置5とを備えた。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
リンク作動装置
【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
プレス機
【課題】大型化を招くことなく、構成の複雑化を招くことなく、スライドの下死点を調整可能とするプレス機を提供する。
【解決手段】プレス機は、フレーム12に回転可能に支持される第1のクランク軸14と、該第1のクランク軸14の偏心軸部14bの偏心運動に連動する従動部材26と、該従動部材25に回転可能に支持される主軸部28a及び該主軸部28aに偏心する偏心軸部28bを有する第2のクランク軸28と、上下方向へ移動可能に案内され、第2のクランク軸28の偏心軸部28bに回転可能に連結されるスライド18と、第2のクランク軸28の前記主軸部28aに回転可能に嵌合され、少なくとも一対の平側面を有する摺動子と、該摺動子の前記一対の側面を受ける案内面を有し前記摺動子を上下方向へ案内可能に受け入れるガイド部材と、該ガイド部材の姿勢又は位置を変更可能に保持する操作手段38とを含む。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
三次元的動作機構構造体
【課題】小型化された構造で頭の動きを模することができるとともに製造コストを抑え、位置制御を確実でしかも容易に行うことのできる三次元的動作機構構造体を提供すること。
【解決手段】三次元的動作機構構造体は、頭部と、前記頭部の下方に位置するよう配設された胴部と、前記頭部に接続されるとともに、前記胴部に軸支された左右回動部材に連結され、前記左右回動部材を回動することにより、前記頭部を左右に揺動させる左右揺動用平行リンク機構と、前記頭部の前方または後方のいずれか一方に接続されるとともに、前記胴部に軸支された前後回動部材を回動することにより、前記頭部を前後に揺動させる前後揺動用リンク機構と、を備え、前記左右回動部材と前記前後回動部材とを回動することにより、前記頭部を三次元的に動作させるよう構成されている。
(もっと読む)
ロボットの関節機構の制御装置
【課題】ジンバルリンクを有するロボットの関節機構による動作を簡易なアルゴリズムで高精度に解析することができるロボットの関節機構の制御装置を提供する。
【解決手段】固定位置算出手段により、第1モータ191および第2モータ192のモータ角θ1およびθ2から、第1ロッド171および第2ロッド172の他端位置171b,172bを算出しておき、仮ロッド長算出手段12が、一端位置171a,172bの前回値を用いて、第1ロッド171および第2ロッド172の仮ロッド長L´を算出する。そして、ロッド不定位置決定手段16が、この仮ロッド長L´と実際のロッド長Lとの偏差であるロッド偏差ΔDを0に収束させることで、第1ロッド171および第2ロッド172の一端位置171a,172aを決定する。最終角度出力手段17が、一端位置171a,172aから、メインリンク150の姿勢角α,βや手180の姿勢角を算出して出力する。
(もっと読む)
平行アームを持つロボットあるいは触覚インターフェース構造体
本発明は6自由度を有すると共にベース(2)と二つの平行なアーム(B,B')とリストジョイント(P)とを有するロボットまたは触覚インターフェース構造体に関し、アーム(B,B')はベース(2)とリストジョイント(P)との間に回動可能に設けられ、アーム(B,B')は、ショルダージョイント(3,3')とアーム(4,4')とリストジョイント(P)を支持する前腕(6,6')とを具備し、リストジョイント(P)は、それに対してハンドルホルダー(18)が第1の回転軸線(X)を中心として連結される連結セグメント(24)と、第2の回転軸線(Z)を中心としてハンドルホルダー(18)に回動可能に連結されたハンドル(16)であって、第1の軸線(X)、第2の軸線(Z)および第3の軸線(Y)を中心として回動可能なハンドル(16)とを備え、連結セグメント(24)の回転に対する少なくとも第1の回転軸線(X)を中心とするリストジョイント(16)の回転を低速化する手段が連結セグメント(24)に対して、さらにヒンジ結合されている。  (もっと読む)
(もっと読む)
6自由度パラレル機構
【課題】エンドエフェクタが、1軸周りに連続回転することができ、ベースに対して大きな姿勢角を取ることができる、6自由度パラレル機構を提供する。
【解決手段】6自由度パラレル機構の連鎖が、ベースと、ベースの中心からベースの垂直方向上方に延びるZ軸周りを回転するように、第1の回転軸受を介してベースに取り付けられたアームと、アーム上に固定されたリニアガイドと、リニアガイドの上を往復するスライダと、球面軸受を介してスライダに接続されたリンクと、リンクの球面軸受とは反対の側に取り付けられた第2の回転軸受と、を備え、6自由度パラレル機構を、ベースとエンドエフェクタとの間に、連鎖を3本並列配置して構成し、エンドエフェクタとリンクとを、第2の回転軸受によって、互いに離れた3箇所で結合する。
(もっと読む)
自由運動シミュレータ装置
【課題】 航空機や自動車用シミュレータとして、従来からスチュワート型のパラレルメカニズムが用いられているが、特に、小型航空機の極限的動作、特に失速、きりもみ等の状態の再現では傾斜角が不足し、動作範囲も狭いことから、小型、低価格で動作範囲が広く、角度を大きく取れる、新規のパラレルメカニズムからなる小型航空機用のモーション付きシミュレータを提供する。
【解決手段】平面上に一端を同一軸に固定した、直線駆動アクチュエータ2を用い、該アクチュエータ2の他端に直角方向に駆動可能とする駆動装置6を設け、円周方向移動と同時に軸方向移動を可能とする3組のアクチュエータ2で構成されると共に、モーションプレート1は、その下部に、円周上の対向位置に120度間隔で3組の受け部を配置し、平面上に設置したアクチュエータと、モーションプレート1の受け部とを、それぞれ対応するように、上部に回転軸受構造4、下部に球面軸受構造5を有する3組の脚部3で連結した構成のパラレルメカニズムからなるものとする。
(もっと読む)
折畳み式携帯端末
【課題】簡単な構成で、片手操作しても反動で落下させることなく、鞄の中や落下時に誤って第1の筐体と第2の筐体とが開いてしまわないようにする。
【解決手段】ヒンジ部6に、第1の筐体3と第2の筐体5とを開く方向に付勢すると共に、これら第1の筐体3と第2の筐体5とを閉じたときに付勢力を蓄えた状態でロック可能な開操作補助用付勢機構9と、所定量以上押し込まれると、開操作補助用付勢機構9のロックを解除するロック解除用ボタン15とを設ける。第2の筐体5の左右側面に、いずれか一方のみを押し込んでも、ロック解除用ボタン15を所定量押し込まず、同時に押し込むことでロック解除用ボタン15を所定量以上押し込んでロックを解除し、第1の筐体3と第2の筐体5とを自動的に開く自動開きボタン20,21をそれぞれ配置する。
(もっと読む)
パラレルメカニズム及びその制御方法
【課題】一般に、パラレルメカニズムは、外力に対する安定性は十分に備えているが、特異点や、ジョイントの動作範囲による制限のためにテーブルの動作角度が十分に取れないという短所がある。
【解決手段】そこで本発明では、ベースとテーブルの間に複数のリニアアクチュエータを回転ジョイントを介して並列に配置したパラレルメカニズムにおいて、リニアアクチュエータは7個以上とし、それらのリニアアクチュエータの動作を制御する制御装置に、適宜選択した6個のリニアアクチュエータのみを能動動作させると同時に、残りのリニアアクチュエータを受動動作させる制御機能を設けたパラレルメカニズムにより上述した課題を解決している。
(もっと読む)
揺動装置
【課題】モータの質量に関わらず、応答性の高い揺動装置を提供する。
【解決手段】揺動装置10は、ベース12と、揺動テーブル14と、複数のリンク機構20と、当該リンク機構20を駆動するモータ26と、リンク機構20と揺動テーブル14との間に介在する連結部材と、を備える。リンク機構20は、モータの駆動に応じて、その上端位置がリンク機構面内で変化するものの、リンク機構面の位置およびリンク機構面の角度は不変である。連結部材は、スライド機構22と、X,Y,Z軸回りの回動を許容する回転ジョイントと、を有しており、揺動テーブル14がリンク機構20に対して回動およびスライドすることを許容する。そして、かかる構成とすることで、モータ26をベース12に固定設置(位置固定)することが可能となる。そして、結果として、リンク機構20、ひいては、揺動装置10の応答性を向上することができる。
(もっと読む)
1 - 20 / 58
[ Back to top ]