
Fターム[3J070AA02]の内容
機械式制御装置 (8,193) | 操作部材の種類、形式 (1,516) | 人間が直接操作するもの (1,506) | 手で操作するもの (973)
Fターム[3J070AA02]の下位に属するFターム
揺動レバー (511)
スライド摘み (21)
プッシュプルボタン (10)
プッシュ専用ボタン (74)
キーボード (4)
回転ハンドル (42)
回転摘み (159)
側面突出チューナー (9)
経路を1つだけ持つもの (13)
経路を複数持つもの (41)
同一方向操作により元の状態に復帰 (6)
補助操作部材を用いるもの (8)
Fターム[3J070AA02]に分類される特許
61 - 75 / 75
コントロールケーブルの操作系統切換装置
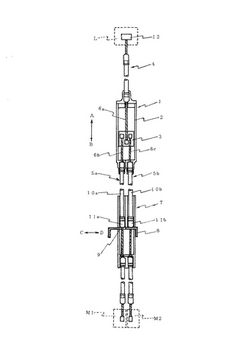
【課題】操作系統切換手段により単一の操作装置で、複数の従動機器の何れか、又は複数の操作装置とそれに関わる従動機器の操作の関係を相互に入れ換えて操作し得る機構の提供。
【解決手段】操作力分割手段の一端に接続した操作側コントロールケーブル4、他端に接続した複数の作動選択コントロールケーブル5a、5b、作動選択コントロールケーブル5a、5bの一領域に取付けた操作系統切換手段7とからなる。 又前記構造のコントロールケーブルを一系統とした複数の操作力分割手段101a、101bと、それに対応した複数の操作系統切換手段107a、107bとからなる多系統のコントロールケーブルで、一系統における複数の作動選択コントロールケーブル105a〜105dの内、少なくとも1本が他系統の操作系統切換手段107a、107bの一方に接続され、他方に従動機器側コントロールケーブル114a、114bが係合された構造である。
(もっと読む)
車両用操作装置

【課題】ステアリングホイールの持ち替え操作などの煩雑な操作を不要とし、手動操作具の操作量を少なくしたまま車輪転舵角度、スロットル操作角度等の操作量を比較的大きく確保できると共に操作性が良い車両運転者用操作装置を提供する。
【解決手段】独立した2つの操作レバー3の各々の前後方向操作量又は前後方向操作力等の操作状態量を検出し、ステアリングECUにて該操作状態量の差を演算する。該操作状態量差に応じて車輪転舵量もしくは左右車輪の駆動・制動力の左右差を制御し操舵を行う。あるいはステアリングECUにて該操作状態量の和を演算し、該操作状態量の和に応じてスロットル操作角度もしくはブレーキ装置を制御し車両前後方向の加速減速制御を行う。
(もっと読む)
運転姿勢調節装置
【課題】 体格にかかわらず運転姿勢を最適化できる構成を、低コストで実現できる運転姿勢調節装置を提供する。
【解決手段】 ステアリングホイール9の位置を可変するステアリング位置可変手段(ステアリングポスト13)と、シート高さを可変するシート高さ可変手段(Xリンク14)と、アクセルペダル1およびブレーキペダル2の位置を可変する操作ペダル位置可変手段(可動フロアスライドレール8)と、を備えた運転姿勢調節装置において、シート高さ可変手段を駆動するモータ16と、Xリンク14の動きに対し、ステアリングポスト13と可動フロアスライドレール8を連動させる連動機構(シート高さ連動ギヤ17、ステアリングポスト連動ギヤ18および可動フロア連動ギヤ19)と、を備える。
(もっと読む)
入力操作装置
【課題】 乗り物の運転操作を一層楽に行うことができる入力操作装置を提供する。
【解決手段】 車両には、片手で操舵、加減速の各種操作が可能な入力操作装置1が設置されている。車両の操舵はグリップ5をその操舵回転軸線Ls回りに回転操作することで行い、車両の加速はアーム9を介してグリップ5を操舵回動軸線Lg回りに下方へ回動するで行う。グリップ5には、減速操作時に操作する操作レバー11が配設されている。操作レバー11は自身の基端を支点として減速回動軸線Ld回りに回動可能であり、例えば右手親指で把持部5bを支えつつ他の4本の指で引き込むこと、つまりグリップ5に握り操作を付与することで回動操作が可能である。従って、車両の減速はグリップ5を握る動作により操作レバー11を手前側に回動操作することで行う。グリップ5には、オートクルーズ機能を作動させるためのオートクルーズスイッチボタン36が配設されている。
(もっと読む)
入力操作装置
【課題】 簡単な操作で乗り物を運転することができ、しかも入力操作部の操作を所定の操作から他の操作に切り換えて他の走行操作に移るとき、その移行を迅速に行うことができる入力操作装置を提供する。
【解決手段】 車両には、片手で操舵、加減速の各種操作が可能な入力操作装置1が設置されている。車両の操舵はグリップ5をその操舵回転軸線Ls回りに回転操作することで行い、車両の加速はアーム9を介してグリップ5を操舵回動軸線Lg回りに下方へ回動するで行う。グリップ5には、減速操作時に操作する操作レバー11が配設されている。操作レバー11は自身の基端を支点として減速回動軸線Ld回りに回動可能であり、例えば右手親指で把持部5bを支えつつ他の4本の指で引き込むこと、つまりグリップ5に握り操作を付与することで回動操作が可能である。従って、車両の減速はグリップ5を握る動作により操作レバー11を手前側に回動操作することで行う。
(もっと読む)
往復動用駆動装置
【課題】往復動用駆動装置のギヤの歯の傷付きを防止すると共に小型化する。
【解決手段】アクチュエータ7に設けたセクタギヤ14の揺動運動によりトランクリッドを自動開閉駆動し、そのセクタギヤを内蔵するケーシング16・17の一方にケーシングのプレス加工時に同時に突出形成した全閉・全開ストッパ16a・16bを設け、手動操作時にセクタギヤの揺動方向端縁を衝当させて、手動時の停止限度の位置決めとする。セクタギヤに噛み合う駆動軸のギヤの歯をギヤ不形成部に衝当させてそれ以上の揺動を防止するのではないため、駆動軸のギヤの歯面傷が生じることがなく、常にセクタギヤとの噛み合い状態が良好なものとなる。また、ギヤの歯のピッチとは関係なくストッパの位置を容易に設定することができるため、精度の高い停止位置を容易に設定することができる。
(もっと読む)
作用レバー用の比調整機構
本発明は、特には動力車両において使用するハンドブレーキレバー又はペダル等の手動で操作される作用レバーのための比調整機構に関するものである。該比調整機構は、取付体(2)と、作用レバーアーム(20)と、該作用レバーアーム(20)を取付体(2)に回転可能に取り付ける回転シャフト(15)とを有し、該回転シャフト(15)は作用レバーアーム(20)に移動可能に取り付けられると共に、取付体(2)に移動可能に取り付けられている。更に、該比調整機構は、回転シャフト(15)を作用レバーアーム(20)に対して移動させる第1調整手段(19,21)と、回転シャフト(15)を取付体(2)に対して移動させる第2調整手段(22,23)を有している。  (もっと読む)
(もっと読む)
平行ハンドルシステムおよび平行ハンドルシステムを設計するための方法
【課題】 平行ハンドルシステムを提供する。
【解決手段】 平行ハンドル、平行ハンドルシステム、および道具又は制御機構と共に使用する手のための平行ハンドルを設計するための方法。平行ハンドルは親指を受ける側部と人差指を受ける側部を有する橈骨区画を有し、前記
橈骨区画は手の手掌表面の一部と係合する表面を有するハンドルと、中指の少なくとも一部と薬指の少なくとも一部を受ける側部と手根管上に位置する手の表面に過度の圧力が掛かるのを回避する表面を有する中間区画と、小指を受ける側部を有し且つ小指の端部を位置決めするように手の手掌表面の一部と係合する表面を有する尺骨区画を含んでいる。  (もっと読む)
(もっと読む)
自動車の走行及び停止システム
【課題】 アクセルとブレーキの踏み間違いによる事故を撲滅する。
【解決手段】 本発明は、アクセルと、アクセルに対応して設ける停止ブレーキを、手で操作できるようにしたことを特徴とする自動車の走行及び停止システムであり、詳細には、停止ブレーキを手の圧力で操作できるようにしたことを特徴とする自動車の走行及び停止システム、及び停止ブレーキを手の指で操作できる押しボタンで作動できるようにしたことを特徴とする自動車の走行及び停止システムである。
(もっと読む)
エルゴノミック入力装置
本発明は、コンピュータ環境において制御信号を手動で入力するためのエルゴノミック装置(100)に関する。装置(100)は、コンピュータ処理装置との通信のため接続されるようになっており、作業面上で装置を支持する基体(10)と;ユーザが手で操作すべく基体(10)に突設され、基体(10)に対して移動可能であり、コンピュータ環境において対応する入力制御信号を生成する操作部材(21)を含む、基体(10)に設けられたコントロールパネル(20)と;装置(100)の使用中ユーザの手のひらを支持するために基体(10)に設けられたパームレスト(40)と;を備える。コントロールパネル(20)はユーザ入力ボタン群(22、23、24)を更に備え、それらは各々対応する入力制御信号を生成するよう作動可能であり、少なくとも1つのボタン(22、23、24)はプログラム可能である。装置(100)は基体(10)に設けられたディスプレイ手段(30、30′)を更に備え、関連する制御信号又はプログラム可能なボタンにプログラムされた機能を表示する。  (もっと読む)
(もっと読む)
操作入力装置
本発明の目的はアクティブ反力部(3)が動作しない場合でも車両への操作入力を可能とし、車両の運転を可能にすることにある。
本発明の一実施例においては、車両の操作入力装置において、操作力を受ける操作入力部(1)と、加えられた操作力に対して、電気的な制御による反力を前記操作入力部(1)に生成するアクティブ反力部(3)と、前記アクティブ反力部(3)と前記操作入力部(1)との間の力の伝達経路を開放するアクティブ反力切り離し部(4)とを設けることとした。
(もっと読む)
回転スイッチ機構
本発明は、ダイヤル部と、このダイヤル部の回動に伴い回動するポジションセンサとを備え、ポジションセンサからの出力信号に基づき、ダイヤル部の回転位置を決定するようにしている回転スイッチ機構において、ダイヤル部の回転角の増大に対応でき、センサの読み取り分解能を確保してダイヤルステップ数を多くすることを目的とする。 本発明は、ポジションセンサ13c−1,13c−2,13c−3を複数設けると共にダイヤル部の回転位置に応じて出力信号を切り換える検知スイッチ16,17を設け、ダイヤル部の回動可能な全角度範囲を複数の領域に分割し、それぞれの分割領域を異なるポジションセンサに割り当て、検知スイッチ16,17の出力信号に基づき使用するポジションセンサを切り替えることにより構成される。検知スイッチがオンとなる領域をダイヤル部の所定の回転位置に割り当て、検知スイッチがオフとなる領域でポジションセンサからの出力信号を利用してもよい。 (もっと読む)
手動式電気制御装置
制御レバーが自在継手型ピボット継手によって取り付けられた手動式電気制御装置を開示する。制御装置は、互いに異なるピボット旋回を可能とする2本の軸を有する。一方の軸は、ピボット継手の2つの軸受部が移動する軸受ブッシュによって形成されている。軸受タペットが軸受部上に配置されており、他方の軸を中心として制御レバーをピボット旋回させることができる。  (もっと読む)
(もっと読む)
ロック装置
本発明は、ロック装置(10)であって、孔(16)を備えた移動可能な保持体(7)と、所定の輪郭表面(12)を備えた位置固定の輪郭形成体(9)と、孔(16)内に可動に配置されていて圧縮ばね(21)を用いて生ぜしめられる軸方向のばね力によって負荷されるピン(8)とが設けられており、該ピン(8)のピンヘッド(14)が、保持体(7)の孔(16)から外に進出していて、接触表面(12)との接触対を形成しており、さらにピン(8)と保持体(7)との間に少なくとも1つのセンタリング装置(18)が設けられている形式のものに関する。このような形式のロック装置において本発明の構成では、少なくとも1つのセンタリング装置(18)が少なくとも1つの弾性変形可能なリング(19)を有しており、該リング(19)が、ピン(8)と保持体(7)との間において孔(16)の内部に配置されていて、孔(16)の内部において移動可能に配置されていて、かつ圧縮ばね(21)の力作用方向とは逆向きに先細になる断面を備えた表面(22)を有しており、この表面(22)が、該表面(22)に対して相補形状を有しているピン(8)における表面(23)と接触している。  (もっと読む)
(もっと読む)
並進3自由度を提供する平行運動伝達構造を有する運動伝達装置
本発明は、並進3自由度を提供する平行運動伝達構造(3)を有する運動伝達装置に関し、上記構造は、1つのベース部材(1)と、1つの可動部材(2)と、ベース部材(1)上に配置される少なくとも1つの回転アクチュエータ(30)と、ベース部材を可動部材に連結する、それぞれが枢動制御アーム(10)を備える平行運動チェーンとを備える。少なくとも1つの回転アクチュエータ(30)の回転運動は、可動部材の並進運動が制御アームの回転運動に、又は制御アームの回転運動が可動部材の並進運動に伝達されるように、各枢動制御アーム(10)に伝達される。少なくとも1つの回転アクチュエータ(30)は、その軸(31)が制御アーム(10)の回転軸に対してほぼ垂直であるように配置される。平行運動伝達構造は、3つの平行運動チェーンを備え、各チェーンは、枢動制御アームと、一端が回転2自由度継手によって制御アームの端に、他端が可動部材にヒンジ式に取り付けられることによりデルタタイプの配置を形成する、一対の平行リンク棒とを備える。各チェーンには各回転アクチュエータが設けられ、回転アクチュエータは、その軸が互いに対してほぼ平行であるように配置される。回転アクチュエータと制御アームとの間の運動は、ケーブル部材(51)によって伝達される。  (もっと読む)
(もっと読む)
61 - 75 / 75
[ Back to top ]