
Fターム[4C097BB02]の内容
Fターム[4C097BB02]に分類される特許
201 - 220 / 270
義手

本発明は、本体を有する義手に関し、この本体には、義指(3)が関節式に取り付けられており、この義指は、駆動装置および少なくとも1つの回動軸(15,31)によって、本体に対し相対的に可動である。
【解決手段】第1の駆動装置が本体に設けられており、力伝達手段(10)を介して義指(3)と連結しており、第1の回動軸(15)を中心として回動を可能にする。第2の駆動装置(30)が義指(3)に設けられており、この義指(3)の少なくとも一部分を、第2の回動軸(31)を中心として、第1の回動軸(15)対し相対的に回動することができる。
(もっと読む)
高分子アクチュエータ及び高分子アクチュエータにより駆動されるロボットアーム及びロボットアームを有するロボット

【課題】薄型化が可能で、大きな変位を得ることができる高分子アクチュエータ、前記高分子アクチュエータにより駆動されるロボットアーム、前記ロボットアームを有するロボットを提供することを目的とする。
【解決手段】板状の基盤部材と、導電性高分子を含む伸縮部材と、前記基盤部材と角度変化が可能である可動部材と、前記伸縮部材との間に電圧印加するための電極と、前記伸縮部材と前記電極の間に挟まれた電解質托体層とを備え、前記基盤部材と前記伸縮部材と前記可動部材は、それぞれを一辺とする三角形を形成するように配置され、かつ前記伸縮部材の伸縮により前記可動部材の角度が変化する高分子アクチュエータを提供する。
(もっと読む)
抗微生物組成物および傷口被覆材
【課題】微生物を殺滅する効果を有する貴金属の医療応用に対する形態を提供する。
【解決手段】傷口被覆材および抗微生物組成物。該傷口被覆材は、炭素質材料、該炭素質材料に添着した貴金属、および必要に応じて選定された可撓性基材層を含み、該炭素質材料は粉末、顆粒、繊維、および/または薄片の状態を有し、かつ活性炭、グラファイト、炭素、およびその組み合わせからなる群より選ばれ、かつ該貴金属は銀、金、パラジウム、白金、銅、亜鉛、およびその組み合わせからなる群より選ばれる。該抗微生物組成物は、皮膚で局部的に用い、かつ上記炭素質材料および該炭素質材料に添着した貴金属を含む。
(もっと読む)
義眼装置
【課題】コンピュータビジョンやコンピュータグラフィックスの技術により正常な眼の動きに追随する角膜の画像を描画し自然な外観を保つことができる義眼装置を提供する。
【解決手段】
義眼5は、正常な眼の動きを撮影するカメラ2が取り付けられた専用眼鏡1と共に装用される。義眼の画像は、画像処理部において、カメラ2で撮影された正常な目の画像を基に合成され、専用眼鏡1の送信部から、義眼5の受信部8へと伝送される。伝送された画像は、義眼5に埋め込まれた表示部6で表示される。
(もっと読む)
エピテーゼ製作方法、エピテーゼ製作支援装置およびエピテーゼ製作支援プログラム
【課題】製作者の熟練によらず、エピテーゼ製作の精度を高めることが可能なエピテーゼ製作方法、エピテーゼ製作支援装置およびエピテーゼ製作支援プログラムの提供。
【解決手段】コンピュータ1上で患者の患部を形状回復した画像1dをプロジェクタ2により患者の顔面模型40上に等倍で投影する。このように、患者の患部を形状回復した画像1dが患者の顔面模型40上に等倍で投影されることにより、顔面模型40上に形状回復した画像1dが立体的に再現されるので、この顔面模型40上でエピテーゼ30の修正を行い、この顔面模型40上に再現された形状回復した画像1dをエピテーゼ上に反映させる。
(もっと読む)
機械的に作動可能な指部材がある人工補装具
少なくとも1つの機械的に作動可能な指部材を提供する人工補装具(1)。人工補装具(1)は、人工補装具の支持部材上に固定されたウォーム歯車手段(5)に対して実質的に接線方向に延在し、ウォーム歯車手段の軸(8)の周囲で回転するように装着された少なくとも1つの指部材(3)を有する。指部材は、ウォーム手段(13)を駆動するように作動可能な駆動モータ(7)を有する。ウォーム手段(13)は、人工補装具の使用時に駆動モータが作動すると、指部材(3)がウォーム歯車手段(5)の周囲で動作するように、ウォーム歯車手段(5)と係合し、ウォーム手段(13)は指部材(3)の外側に配置される。 (もっと読む)
体関節サポ一夕
【課題】 体関節サポータにおいて、対象となる人体の個体差や経時変化に柔軟に適応し、高い精度と信頼性を実現する。
【解決手段】利用者の指示に応じて、体関節をサポートする体関節サポータ200に対する空気圧を調節する際に、体関節サポータ200の圧力と、体関節サポータ200内部のフォトセンサーの光量変化により得られる、体関節サポータ200の変位量に基づき適応学習型PID制御によって電磁弁500の動作を制御する。
(もっと読む)
学習支援装置、学習支援方法、仮想ヒューマンインタフェース装置、仮想ヒューマンインタフェース方法、仮想ヒューマンインタフェースシステム、これらの装置を実現するプログラムおよび記録媒体
【課題】 本発明は、学習支援装置、学習支援方法、仮想ヒューマンインタフェース装置、仮想ヒューマンインタフェース方法、仮想ヒューマンインタフェースシステム、これらの装置を実現するプログラムおよび記録媒体に関し、筋肉の動きが制約されることなく、複数の筋肉の筋電信号に基づいて所望の複数の関節の状態やこれらの状態の組み合わせの時系列を精度よく高速に推定できることを目的とする。
【解決手段】 複数の筋肉の筋電信号より前記複数の筋肉の張力を検出する検出手段と、前記複数の筋肉の張力に応じて定まる複数の関節の状態と前記複数の筋肉の張力との履歴に基づいて、前記複数の関節の状態の組み合わせの時系列を推定する機械学習のモデルを生成するモデル生成手段とを備えて構成される。
(もっと読む)
4軸補装具関節
【課題】
本発明による4軸補装具関節は、下肢能力を失った歩行者ができるだけ自然に歩行できるようにする。
【解決手段】
本発明は、4軸補装具関節に関する。本発明の4軸補装具関節は、上部支持部110が上段に固定される上部固定片120と、下部支持部130が下段に固定される下部固定片140と、一側端は前記上部固定片120の前半部に、他側端は前記下部固定片140の前半部に各々回動可能に設けられる前方回転レバー150と、一側端は前記上部固定片120の後半部に、他側端は前記下部固定片140の後半部に各々回動可能に設けられて、前記前方回転レバー150に対して相対的に長さが短く、前記上部固定片120と下部固定片140が一定の軌跡を描いて上下および前後方向への回転を可能にする後方回転レバー160と、前記上部固定片と下部固定片の相対回転を弾性的にガイドする弾性ガイド手段を含んで構成されることを特徴とする。
(もっと読む)
下肢人工装具用調整装置
下肢人工装具用の油圧式踵高さ調整装置は、義足を脱着可能に取り付けるための足取り付け部(18)と、足取り付け部に枢動接続されて、踵高さ調整軸のまわりの脛部に対する足取り付け部の角度調整を可能にする脛部とを有する。相対角度位置は、油圧ピストン(42)と、調整が必要なときにチャンバの並進運動を行うように配置されたピストン(42)を収容する脛部内のチャンバ(40)を有するおよびシリンダ組立体とによって設定される。バイパス通路が、ピストンの両側のチャンバの部分を相互接続し、この通路は、閉位置の方にばねで付勢された手動弁を収容する。ピストンは、踵高さ調整軸と平行で且つ踵高さ調整軸から離間された中間横方向軸を規定する車軸関節によって足取り付け部に枢動接続されたピストンロッドを有する。ピストンロッドとピストンロッドを嵌め込む穴との間に十分な隙間があれば、チャンバ内のピストンの多少の位置ずれを許容することができる。並進運動を行うピストンを脛と関連付けられた構成要素内に設けることによって、装置を、余分なスペースを取ることなく足接続機構の近くに配置することができる。
 (もっと読む)
(もっと読む)
補綴用部品の装着不良の減少方法
少なくとも上側椎骨に取り付けるための上部パーツおよび下側椎骨に取り付けるための下部パーツを備えた補綴具を、脊柱に供給し、前記上部パーツは下部曲面を有し、前記下部パーツは上部曲面を有し、前記上部曲面および下部曲面は、上側椎骨および下側椎骨を通る中央垂直軸に対して後方にオフセットした曲率半径中心を有する、および、曲率半径中心の実質的に同じ垂直軸上において上部パーツおよび下部パーツのうち少なくとも一方の重心の位置決めをする工程を含む補綴具の装着不良を減少させる方法。
【図面】図3  (もっと読む)
(もっと読む)
人工の四肢の機能的な解析を実施するための方法
本発明は、人工の四肢(30)を備えた人のために機能的な解析を実施するための方法に係る。この人工の四肢は、基本的な機能を実行するためのセット(30)であって、少なくとも一つの取り外し可能な機能的部分(33)を備えたモジュール方式でデザインされ、特にこの部分が、付加的な機能を可能にする。複雑な外部の装置及び測定デバイスを使用することなく解析を実施するために、前記機能的部分の組み込みに関係する寸法に対応するサイズのセンサー・アセンブリ(33’)が、前記取り外し可能な機能的部分(33)の代わりに組み込まれる。前記センサー・アセンブリ(33’)は、次に、前記人工の四肢の基本的な機能のセッティングを最適化するために、前記人工の四肢(30)の使用中に発生する力、加速度および/またはトルクを測定する。前記センサー・アセンブリ(33’)は、その後で、前記機能的部分(33)で置き換えられ、最適化されたセッティングが維持される。 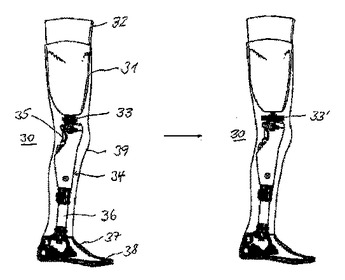 (もっと読む)
(もっと読む)
筋力補助装置
【課題】持ち上げる動作以外にも、力を入れる作業が存在し、例えば、椅子から立ち上がる動作時には膝や太腿の筋力を補助し、支える腕の筋力を補助する必要がある。また、筋力の補助において回転機による補助では、利用者の関節の可動域を超えた補助となる可能性が皆無でないため、安全性の高い筋力補助装置を提供する。
【解決手段】本発明の筋力補助装置は、利用者の人体を囲む外骨格と前記外骨格を利用者の人体に装着せしめる衣服部と前記外骨格を動作せしめるアクチュエータと前記アクチュエータを動作せしめる駆動源と前記駆動源を制御する機器を備えた筋力補助装置であるので、コンパクトに全身に装着することが可能な装具であり、アクチュエータを全身に配置することにより、課題であった全身の筋力の補助を行うことが可能となる。
(もっと読む)
旋回伸縮リンク機構と同旋回伸縮リンク機構を用いた股義足及び大腿義足
【課題】補償動作を伴う義足の問題点を解決するのに適した平面リンク機構であるのと同時に、義足以外にも応用可能な旋回伸縮リンク機構と、同旋回伸縮リンク機構を用いた股義足及び大腿義足とを提供する。
【解決手段】一対の支持リンク2・3を固定リンク9に第一のピンaにより交差した状態で結合し、一対の同一長さの支持リンク2・3間に、同一長さの四本のリンク4・5・6・7をピンb・c・d・eで結合し閉環状にした平行四節リンク8を配置して、その対角線上の一組の第二・第三のピンc・eにそれぞれ一対の支持リンク2・3の一方を回転自在に連結する。そして、固定リンク9に連結リンク10を第四のピンfによって結合し、この連結リンク10を平行四節リンク8のもう一方の対角線上に位置する一組の第五・第六のピンb・dのうち、第一のピンaに近い方に位置する第五のピンbに回転自在に連結する。
(もっと読む)
筋力補助装置
【課題】 脚部の筋肉に加わる負荷が自然で、専門家を頼らずに手軽に使用できる筋力補助装置を提供する。
【解決手段】 脚部フレーム2と、この脚部フレーム2の足首に対応する箇所で回動可能に連結された足部フレーム3とを、複数の固定ベルト4で固定し、脚部フレーム2の上部に設けられた駆動制御部6と足部フレーム3の踵部とに連結リボン7を張り渡した。従って、足首が伸びるときに、連結リボン7の巻取動作を駆動制御部6で制御し、脹脛の筋肉収縮による足の動きとほぼ同じ動作をさせ、脹脛の筋肉に加わる負荷を自然な状態にすることができる。また、足部フレーム3の踵部分に設けられた第1圧力センサ8と、足部フレーム3のつま先部分に設けられた第2圧力センサ9とで検出された各圧力値に基づいて、駆動制御部6が連結リボン7の巻取動作を制御するので、連結リボン7の巻取制御が単純で、専門家を頼らずに手軽に使用することができる。
(もっと読む)
モジュール化された義足カバー
【課題】 短時間で外装でき、膝の屈伸に悪影響を与えず、膝の破れなどの問題もない義足カバーを提供する。
【解決手段】 義足カバーを、大腿ソケットに取り付けられる大腿モジュール10と、下腿パイプ6に取り付けられる下腿モジュール30と、下腿モジュール30に揺動可能に支持される膝蓋骨モジュール20とにモジュール化する。これらの上を伸縮性繊維素材で作った皮膚モジュールで覆う。また、各モジュールの構成要素をできる限り既製品化する。
(もっと読む)
義足
【課題】義足のつま先接地で義足の膝折れをロックして防ぎ、義足の踵接地で義足の膝屈曲抵抗を高めて膝屈曲をゆっくり行わせるようにし、つま先接地にあっては膝曲げ動作を連続して続けている場合にはロックされることなく曲がるようしてスムーズな平地歩行及び坂道や階段の下り歩行を可能にした。
【解決手段】膝継手部8の下方の下腿部4と足部5との間に、足部5のつま先接地と踵接地とでそれぞれ逆向きの回動変位する緩衝装置6を設け、液圧シリンダー7に伸展通路73、屈曲通路74、バイパス通路75、補助通路76を設け、屈曲通路74につま先接地ロック弁77を設け、屈曲通路74Aに踵接地ロック弁79を設け、屈曲通路74Bに流量調節弁78を設け、緩衝装置6とつま先接地ロック弁77とをつま先接地伝達線77aで連結し、緩衝装置6と踵接地ロック弁79とを踵接地伝達線79aで連結し、補助通路76に補助通路開閉弁76cを設けた。
(もっと読む)
視覚再生補助装置
【課題】 網膜を構成する細胞に視覚の再生を行うための電気刺激パルス信号を好適に与える視覚再生補助装置を提供すること。
【解決手段】 網膜を構成する細胞を電気刺激することにより視覚を再生する視覚再生補助装置において、患者に認知させる被写体を撮影する撮影手段と、患者眼の脈絡膜の外側に置かれるとともに網膜を構成する細胞に電気刺激パルス信号を与える複数の電極を有する信号発生手段と、撮影手段に接続され撮影された撮影情報を電気刺激パルス信号用のデータに変換して信号発生手段に送信する信号変換手段手段と、信号発生手段に接続され前記信号変換手段からのデータを受信する受信手段と、電極の極性と反対の極性を持つ不関電極と、を備え、電気刺激パルス信号の波形は異なる極性の矩形波で構成された二相性矩形波で,そのパルス幅を0.2msec以上2msec以下とすること。
(もっと読む)
補助装置
【課題】 身体に装着することが可能であり、使用時に使用者に違和感を与えることがない装着型パワーアシスト装置を提供する。
【解決手段】 アシスト装置10は、肘関節104の近位側身体である上腕100に装着する近位側装着部12と、肘関節104の遠位側身体である前腕102に装着する遠位側装着部14と、近位側装着部12と遠位側装着部14を夫々連結する連結機構部16と、モータ18等を備える。モータ18は肘関節104の回転軸Lからオフセットさせて上腕100の裏側に配置されている。これによりアシスト装置10の体側方向への張り出しを少なくできる。またモータ18の重心Gは上腕100の幅内に位置するように配置される。これにより上腕100を動かした際に、モータ18の自重によって肘関節104と上腕100にひねるようなモーメントが加わることを防止できる。よって使用時に使用者に違和感を与えることがない。
(もっと読む)
発声補助装置
【課題】 体内に埋め込むのではなく、手軽に携帯して使用でき、手術による苦痛や体への負担、困難な食道発声法の習得も不要であり、しかも振動空気を利用することにより健常者に近い音の発声が可能となる発声補助装置を提供せんとする。
【解決手段】 携帯可能な空気供給手段2と、該空気供給手段2から供給される空気に振動を付与するための振動付与部3と、口又は鼻孔に挿入され、前記振動付与部で振動を付与された振動空気を口腔内に導くための振動空気導入管4とより構成した。
(もっと読む)
201 - 220 / 270
[ Back to top ]