
Fターム[4C097BB02]の内容
Fターム[4C097BB02]に分類される特許
161 - 180 / 270
義肢用ソケットならびに義肢用ソケットおよび義肢装置からなるシステム

遠位の義肢装置(2)のための結合手段を有し、肢の切断断端を受け入れるための義肢用ソケットであって、この義肢用ソケット(1)は、少なくとも1つのシェル(11,12)を有し、このシェルは、湾曲した、開いた横断面部分を有し、シェルの両端は、装着された状態では、互いに少なくとも部分的に重なり合い、少なくとも1つの緊定手段(14、15)が、シェル(11,12)に設けられており、周方向に作用し、シェルの両端を互いに緊張させる。シェル(11,12)は、異なった弾性の領域をもって形状安定的なプラスチックから形成されている。 (もっと読む)
アームサポート、および、このようなアームサポートを有する着座サポート

【課題】腕機能が低下した人々が簡便に使用できる動的アームサポートを提供する。
【解決手段】アームサポートは、連結デバイスを介してリフトデバイス1に連結された腕支持エレメント3を備える。腕支持エレメント3は、前端と後端との間に長さ方向を有し、平面図において前端と後端との間に位置する傾動軸線Eを介して連結デバイスに連結されている。リフトデバイス1は、アームサポートの重量と、アームサポートに加えられた荷重、とりわけ使用者の腕と、を支持するための補償手段を含んでいる。
(もっと読む)
ダンパー機能付回転型アクチュエータおよびそれを用いた動作補助装置
【課題】単純な構造で駆動軸のトルクを柔軟に従動軸へ伝達することができ、しかもそのダンパー効果が可変の回転型アクチュエータおよびそれを用いた動作補助装置を提供する。
【解決手段】駆動源により回転駆動される駆動軸と、駆動軸と一体に回転するポンプ羽根車と、駆動されるべき系への入力である従動軸と、従動軸と一体に回転するタービン羽根車と、ポンプ羽根車からタービン羽根車へ動力を伝達する流体、ポンプ羽根車およびタービン羽根車を収容するハウジングとを備え、ポンプ羽根車および/またはタービン羽根車が可変ピッチ機構を有することを特徴とするダンパー機能付回転型アクチュエータおよびそれを用いた動作補助装置。
(もっと読む)
アクチュエータおよびアクチュエータを用いた人工筋肉
【課題】簡単な構造により安定した大きな駆動力を供給可能な、電磁石を用いたアクチュエータを提供すること。
【解決手段】軸部材と、該軸部材に対して摺動する少なくとも2つの独立した摺動部材と、前記摺動部材上において、前記摺動方向について直列に配置された複数の電磁石と、前記電磁石に電流を供給する電流供給部と、を備えたアクチュエータにおいて、アクチュエータの全体長が収縮する方向、および伸張する方向の少なくとも一方について、前記摺動部材を摺動させる方向に斥力あるいは引力を発生させるように、前記複数の電磁石の極性を定めた。
(もっと読む)
消臭活性成分を含有するシリコーンゲルを有する物品
本発明は、柔軟材料から形成され、かつ、消臭活性成分Cを含むシリコーンゲルを充填材料として含有する密閉エンベロープAを有する外用人工乳房、痂皮形成防止クッション又は痂皮形成防止マットレスなどの物品に関するものである。 (もっと読む)
補装具関節または矯正器関節
【課題】旋回運動の適切な制動を容易な方法で達成することができる補装具関節または矯正器関節を提供すること。
【解決手段】旋回ピストン(6)と押しのけ室(5)の壁部との間には、流れ横断面を規定する少なくとも1つの輪郭区域が形成されており、この輪郭区域は、選択された旋回角度に亘って、連通流路(9)および押しのけ室(5)と流体力学的に連通しており、旋回ピストン(6)の角度位置に従って、流体の流出のための異なった自由な流れ横断面を供給する。
(もっと読む)
動作支援装置およびその制御方法
【課題】安全性が高く、かつ人間的なスムーズな動きを再現して上肢の動作を好適に支援すると共に、多様な場面で使用者の利便に供し、高いリハビリ効果の期待できる動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段30と、上肢の位置および姿勢を検出する第2検出手段14a、16a、18a、20aとを有し、これら各手段からの情報によって制御下に作動するマニピュレータ12を備え、このマニピュレータ12の先端は使用者の上肢が離間自在であり、該マニピュレータ12を第1検出手段30および第2検出手段14a、16a、18a、20aからの情報でフィードバック制御することで、上肢の動作を好適に支援する。
(もっと読む)
上皮幹細胞の分化誘導方法
【課題】 高い安全性のもとに簡易に表皮幹細胞をはじめとする上皮幹細胞の分化誘導を行うための方法を提供すること。
【解決手段】 多血小板血漿を添加した無血清培地中で上皮幹細胞を培養することを特徴とする。
(もっと読む)
作業支援装置
【課題】作業者の身体に装着して関節回りの回動をアシストすることで該作業者の持上げ動作を支援する作業支援装置に対して、肩関節回りの回動又は肘関節回りの回動の一方のみを伴う持上げ動作時つまり肩関節及び肘関節の一方にのみ負担が集中するような持上げ動作を行う際の作業者の肉体的負担を確実に低減する。
【解決手段】動力源としての2つのモータ15,16を備えるとともに、肩関節及び肘関節のそれぞれに負担が分散されるような持上げ動作を行う際には、2つのモータ15,16のうちの一方を駆動してその動力でもって動作支援を行う一方、肩関節及び肘関節の一方にのみ負担が集中するような持上げ動作を行う際には、2つのモータ15,16を駆動して該両モータ15,16の動力でもって動作支援を行うようにする。
(もっと読む)
義足
【課題】スムーズな平地歩行及び坂道や階段の下り歩行を可能にした義足を提供する。
【解決手段】膝継手部9の屈曲伸展の抵抗を調整する液圧シリンダー7が装備された義足1において、膝継手部9の下方の下腿部4と足部5との間に、足部5のつま先接地と踵接地とでそれぞれ逆向きの可動変位する緩衝装置6を設け、液圧シリンダー7に伸展通路73、屈曲通路74、屈曲通路74につま先接地閉弁76を設け、屈曲通路74Aに踵接地閉弁77を設け、つま先接地閉弁76と踵接地閉弁77とを互いに弁の開閉向きを逆向きに閉弁連結作動部材78で連動連結し、義足の足部のつま先接地と踵接地による緩衝装置6の可動変位を検知して可動変位する接地検知部材79を設け、接地検知部材79の可動変位を閉弁連結作動部材78に伝達して可動変位させる接地伝達部材78bを設けた。
(もっと読む)
補助装置
【課題】無線充電技術を用いて、より高性能で安全な補助装置を提供する。
【解決手段】検出部および補助装置駆動部を有し、検出部は、少なくとも、センサ、第1の送受信回路、第1の情報処理回路、第1の充電回路、および第1のバッテリを有し、補助装置駆動部は、少なくとも、駆動部、第2の情報処理回路、第2の送受信回路、第2の充電回路および第2のバッテリを有する。補助装置駆動部に設けられる第2の送受信回路から電磁波を送信、検出部に設けられる第1の送受信回路がその電磁波を受信する。そのときに生じた誘導起電力が検出部に設けられる第1の情報処理回路を介して第1の充電回路に入力され、検出部に設けられる第1のバッテリを充電する補助装置である。
(もっと読む)
装着式動作補助装置、装着式動作補助装置の制御方法および制御用プログラム
【課題】本発明は装着者に与える違和感を可及的に抑えることができる装着式動作補助装置、制御方法および制御用プログラムを提供することを課題とする。
【解決手段】装着式動作補助装置は、アクチュエータ201を有した動作補助装着具2と、生体信号を用い、装着者1の意思に従った動力をアクチュエータ201に発生させるための随意的指令信号を生成する随意的制御手段14と、物理量センサ13により検出された物理量とデータベース6に格納された基準パラメータとを比較することにより、装着者1のタスクのフェーズを推定し、推定したフェーズに応じた動力をアクチュエータ201に発生させるための自律的指令信号を生成する自律的制御手段7と、随意的制御手段4および自律的制御手段7からの指令信号を合成する信号合成手段8と、信号合成手段8により合成された総指令信号に応じた電流を生成し、アクチュエータ201に供給する駆動電流生成手段5とを備える。
(もっと読む)
電気式人工喉頭
【課題】特別の訓練を要しない簡易な操作により、イントネーションのコントロールされた発話を実現し得るような電気式人工喉頭10を提供すること。
【解決手段】筐体20と、筐体20に連結された軸と、軸に連結され、軸を中心に回動自在であり、かつ、その回動方向と異なる方向へ移動可能な操作子と、回動の角度を検出する第1の検出部と、操作子が移動する角度が閾値を超えたか否かを検出する第2の検出部と、記第2の検出部が上記移動の角度が閾値を超えたことを検出している間、指定された周波数の音を発生する音源部と、第1の検出部が検出した角度に応じて音源部が発生する音の周波数を変える制御部とを備えたことを特徴とする。
(もっと読む)
ウレタン製人工乳房及びその製造のための模擬部材
【課題】製造コストを低減させることができるとともに、患者本人のみで形状の決定を行うことができる人工乳房その製造のための模擬部材を提供する。
【解決手段】患者の胸部に装着可能なウレタン製人工乳房において、積層可能とされた平面視で円形状又は楕円形状の複数のシート状ウレタン1a〜1fから成るとともに積層状態にて山形状を成すべくそれぞれの径を異ならせた積層部材1を、任意の枚数及び配置で積層させて、患者の胸部に合わせた任意高さ及び形状の山形状を成形し、成形された山形状の外輪郭に基づきブロック状ウレタンを切削加工して得られるものである。
(もっと読む)
義指
本発明は、基端部材(10)と、中間部材(20)と、先端部材(30)とを具備し、これら部材は互いに枢動可能に装着されている義指であって、この義指中に設けられたモータ(40)を具備し、このモータは、ギヤ機構によって基端部材に対して中間部材を回動させる義指において、中間部材(20)は、長手方向に移動可能なバランスアーム(90)を収容しており、このバランスアーム(90)は、複数のレバー(91、93)によって基端部材(10)と先端部材(30)とにそれぞれ接続されていることを特徴とする。  (もっと読む)
(もっと読む)
回転負荷量の調節が容易な回転ジョイント及びこれを備えた関節補助装備
【課題】逆方向への回転負荷を容易に調節可能な関節補助装備を提供する。
【解決手段】一方の関節保護部材に対して他方の関節保護部材を回転可能に互いに連結する関節補助装備の回転ジョイントであって、一方の関節保護部材に固定可能であり、内部に収容部を有する第1本体と、他方の関節保護部材に固定可能であり、第1本体に対して回転可能に結合された第2本体と、第1本体の収容部内に収容され、第2本体を一方向には自由に回転できるように案内するが、他方向には回転負荷量をもって回転するように構成された回転手段と、回転手段の外側面を加圧し、その加圧力を第1本体の外側で調節することで、第2本体の逆方向への回転負荷量を調節する回転負荷量の調節手段とを含む。
(もっと読む)
真空を使用する人工装具デバイスおよび接続システム
開示される人工装具デバイスは、人の肢を受けるためのレセプタクル;人の肢にレセプタクルを接続するために使用される真空度を維持するためのレセプタクルと流体連結している真空ポンプ;制御器;および/または電子的に制御可能な流体制御デバイスを含み得る。制御器は、ユーザーインターフェースで表示されるべき真空シグニチャーを提供し、かつ/または人の肢にレセプタクルを接続するために使用される真空度を制御するように設定され得る。
 (もっと読む)
(もっと読む)
人工足首継手機構
セルフアライメント足・足首人工装具アセンブリは、足部材(10)を回転可能に取り付けた足首ユニット(16)を有する。足首ユニットは、シリンダ(26)内を直線移動可能なピストン(28)を有する油圧ピストン・シリンダアセンブリを含む。シリンダの軸は、足首ユニットの脛部接続インタフェース(20)により画定される脛軸と一致している。制動抵抗制御弁を含む迂回路(36)により足首継手の背底屈が連続的に油圧制動され、上記ユニットは制動運動範囲の大部分にわたり足背方向と足底方向のいずれにも弾性付勢されない。これにより、立位安定化、バランス制御、階段および傾斜歩行の改善などの利点が得られる。 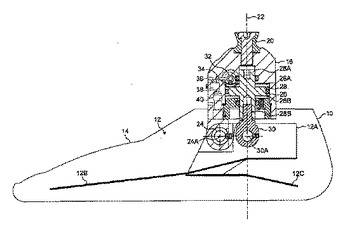 (もっと読む)
(もっと読む)
動力で作動する矯正デバイス
動力で作動する矯正デバイスは、第1のセクション(32)および第2のセクション(34)を有する装具(7)を含み、第1および第2のセクションは、旋回軸(8)で動作可能に連結され、屈曲および伸展方向を画定するように旋回軸のまわりに移動し、そのような方向は、装具の内側および外側領域を画定する。デバイスはさらに、旋回軸が各肢節間の関節に近接するように対応する肢節に該第1および第2のセクションを取り外し可能に取着する少なくとも1組のストラップ(4)を含む。デバイスはまた、筋電図センサ(24)およびセンサと通信するアクチュエータアセンブリを含み、アセンブリは装具に載置され、その体積の大部分を占有する部分が装具の外側領域に近接して配置され、旋回軸のまわりに第1および第2のセクションを駆動する力を印加するように装具の第1および第2のセクションに連結され、力は筋電図センサからの信号に基づく。  (もっと読む)
(もっと読む)
強化グローブ
グローブ内に納められた人の手の把持運動を強化する用途のフィンガーグローブにおいて、上記グローブは手の平部と、グローブの内側に沿って延在する人工腱(1a-1c)を各側面に有するグローブ指部(4a-4c)と、グローブ内に納められた指の先を囲むためのグローブ指部の先端内に固定されたヨーク(6a-6c)と、上記ヨークに接続されたグローブ指部人工腱(1a-1c)の各側面には、グローブ指部内に納められた指と上記指に付けられた接触表面との間の力を検出するために用いられる力検出センサー(12a-12c)とを有しており、グローブ指部用人工腱は、少なくとも一つのアクチュエータ(10a-10c)に接続され、且つ制御ユニット(19)は上記アクチュエータに、力検出センサー内で検出された力に基づいてグローブ指部の人工腱上に引張力を加えさせ、それによってグローブ指部内に納められた指は曲げられる。  (もっと読む)
(もっと読む)
161 - 180 / 270
[ Back to top ]