
Fターム[4C097BB02]の内容
Fターム[4C097BB02]に分類される特許
81 - 100 / 270
装着補助具
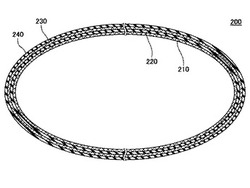
【課題】本発明は、装着式動作補助装置の駆動部からの補助動力が装着者に締結される締結部材を介して伝達される際に締結部材が装着者の服に対して滑ることを防止することを課題とする。
【解決手段】装着補助具200は、密着層210と、弾性層220と、動力伝達層230と、摩擦層240とを一体的に積層したものである。各層間は、縫合または接着または溶着などの接合方法を用いて結合される。弾性層220は、密着層210を装着者の被駆動部位に締付けると共に、装着式動作補助装置の補助動力が増大した場合には密着層210と動力伝達層230との間の補助動力の伝達を緩衝するように弾性変形する。これにより、装着式動作補助装置の補助動力(モータトルク)が過大になった場合には、弾性層220の緩衝により装着者12が被着した服の表面に対して密着層210が滑らないように伝達トルクが緩和される。
(もっと読む)
給電器、受電器、非接触型データ及び電力伝送装置

【課題】ノイズによる誤動作又は破壊等を防ぎ、真に安全性及び信頼性が高い給電器、受電器及び非接触型データ及び電力伝送装置等を提供する。
【解決手段】凹陥部31の底の平坦面31aから開口部に向かって立設され凹陥部31を第1の空間61及び第2の空間62に分割する壁60が形成され、第1の空間61には、受電コイル33を有する受電コア34が凹陥部31の底に形成された第1の凹部内に挿入され、第2の空間62には、第1の凹部31cと第2の凹部31dを連通し、受電コア34の端子31、送信部(35b、35c、35d)及び受信部35aの各端子38に接続されるケーブル39が配設される第3の凹部31eが形成される。
(もっと読む)
医療用物品の回転成形
【課題】医療用装置のシェル、または、他の成形物品を成形するためのシステム及び方法の提供。
【解決手段】本システムは、成形型100が内部に取付けられる多軸回転成形機械50を備える。成形型100は、成形されるべき物品の形状のキャビティ60を有している。成形型100は、シールされて真空が保持される。操作において、シリコーンまたは他の成形材料が成形型100に挿入され、成形型100が真空引きされ、成形型100は少なくとも2本の軸A、B回りに回転されて、成形材料が成形型100の内壁を被覆して、シェルまたは医療用物品を形成する、回転成形システム。
(もっと読む)
人工内耳装置用のフック保持具
【課題】人工内耳装置用であって、フックと耳かけ本体からなる耳かけ部にマイクロホンを設け、この耳かけ部の位置ずれを抑制しつつ、脱着作業が容易で、美観に優れ、マイクロホンをフック先端部に設けた場合でも、マイクロホン付近の音場への影響を少なくすることができる人工内耳装置用のフック保持具を提供する。
【解決手段】フック保持具は樹脂製のモールド部と金属ワイヤでなるフック把持部からなり、前記フック保持具を耳甲介腔と耳甲介艇からなる耳甲介部に装着し、前記フック先端部を前記フック把持部のバネ性で把持する。
(もっと読む)
装着式動作補助装置
【課題】本発明は駆動部の駆動力を動作補助手袋に効率良く伝達することを課題とする。
【解決手段】装着式動作補助装置10は、装着者の指に装着される動作補助手袋20からなり、通常の動作補助手袋と同様に装着される。動作補助手袋20には、被駆動部30と、駆動部40と、線状部材50と、生体信号検出部60と、制御ユニット70とが設けられている。動作補助手袋20は、装着者の手に密着するように手のサイズに合わせた立体的な形状に形成されている。動作補助手袋20の手甲側には、複数の線状部材50が各指の延在方向に沿うように配されている。複数の線状部材50が、伸展方向または屈曲方向に動作すると共に、動作補助手袋20の各指も線状部材50と一体に伸展方向または屈曲方向に動作する。
(もっと読む)
動力義肢の制御方法、及び当該方法が適用された動力義肢
【課題】患肢に装着した動力義肢において、従来は不可能であった巧緻な随意的運動を実現可能とする動力義肢の制御方法及びこれを適用した動力義肢を提供する。
【解決手段】上肢若しくは下肢の一部若しくは全部を欠損した患肢Aと、随意的に動かし得る関節Hとを有する人体に適用される動力義肢1を制御するための方法であって、随意的に動かし得る関節の一又は複数の関節変位を、計測手段3により第1の関節変位として計測するステップと、第1の関節変位の一般化座標空間から動力義肢1の関節変位の一般化座標空間への適切な写像を演算手段5により演算し、第2の関節変位として算出するステップと、第2の関節変位を目標値として、制御手段4、10、20により患肢に適用した動力義肢の一又は複数の関節変位制御を行なうステップと、からなることを特徴とする動力義肢の制御方法及びこれを適用した動力義肢とする。
(もっと読む)
ロボットハンドの被着装置および着脱方法
【課題】ロボットハンドの骨格部への着脱を容易にし、かつ装置個々の識別を可能にするロボットハンドの被着装置を提供すること。
【解決手段】関節機構によって指の曲げ伸ばしが可能なロボットハンドの骨格部11に被着し、指または全体で物を把持するロボットハンドの被着装置10において、ロボットハンドの骨格部に着脱可能な柔軟素材からなり、指先または手の平の所定位置の表面に装置個々の識別に用いる固有の凹凸形状を有するディンプル模様が形成された構成である。また、ロボットハンドの骨格部と被着装置の内面との空間部分に、有機溶剤に溶解し有機溶剤の揮発によって固まる性質の高分子樹脂PVBを充填する。
(もっと読む)
装着型動作支援装置
【課題】関節の遠位身体部位の動作を規制しないようにする。
【解決手段】関節の遠位身体部位に装着される第2サポート部材は、第1サポート部材に連結されるアウター部材80と、アウター部材80に対して回転変位可能に配設されて該遠位身体部位に装着されるインナー部材81とを備える。インナー部材81は、開閉可能に連結された第1インナー半体105および第2インナー半体106からなり、開放させて遠位身体部位にセットし、閉成して該遠位身体部位に装着される。従って、遠位身体部位に回転を伴う捻り動作をすると、アウター部材80に対してインナー部材81が回転変位するので、該遠位身体部位の捻り動作をスムーズに行ない得る。
(もっと読む)
型取り乳房作成法
【課題】型材の重さを相殺するような、自由にコントロールできる負圧を掛け、乳房がふくらんだ状態を保持した上で型取りを行う方法を提供する。
【解決手段】中央部に乳房用の穴を開けた平板部1と、これと一体化する透明な筒部2を乳房上に被せ、押しつけて体表面との水密を保った上で、上から短時間に固化する型材用の流動体を注ぎ入れ、流動体が固化する前に素早く気密性のある蓋部5を被せて、中の空気を予め確認しておいた所定の負圧まで下げて保持する。流動体が固化したら空気を戻し、蓋部5を外した上で固化した流動体を含む平板部1と蓋部5を体表面から取り外して型取りを行う。
(もっと読む)
作動筋−拮抗筋作用を有する動力付き人工膝
人工膝は、並列をなす2つの直列弾性アクチュエーターからなる作動筋−拮抗筋配列を備え、膝関節、該膝関節に接続されて脚部材と並列をなす屈曲用及び伸展用アクチュエーター、及び、該アクチュエーターに独立にエネルギーを供給して、該膝関節及び該脚部材の動きを制御するためのコントローラを含んでいる。屈曲用アクチュエーターは、屈曲用モーターと屈曲用弾性要素の直列結合を含み、伸展用アクチュエーターは、伸展用モーターと伸展用弾性要素の直列結合を含む。センサーは、コントローラにフィードバックを提供する。屈曲用アクチュエーター及び伸展用アクチュエーターを一方向性とすることができ、この場合、屈曲用弾性要素及び伸展用弾性要素は直列ばねである。代わりに、伸展用アクチュエーターを双方向性とすることができ、この場合、伸展用弾性要素は一組の予め圧縮された直列ばねである。代替的には、屈曲用弾性要素を非線形漸軟ばねとし、伸展用弾性要素を非線形漸硬ばねとすることができる。 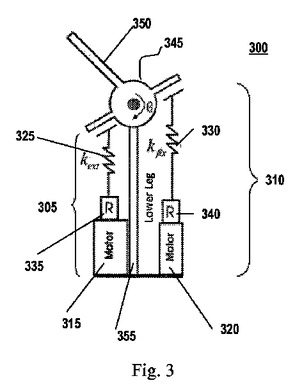 (もっと読む)
(もっと読む)
歩行補助装置
【課題】膝関節に加えるトルクの反転タイミングをユーザの歩行動作に適応させ、ユーザに違和感を与えることなく歩行動作を補助する歩行補助装置を提供する。
【解決手段】歩行補助装置は、ユーザの脚に沿って装着され、ユーザの膝関節にトルクを加える脚装具と、膝関節角が目標角軌道に追従するように脚装具を制御するコントローラを備える。コントローラは、一方の足が離床してから接地脚の足に対する相対的な遊脚膝位置が予め定められた位置に到達するまでは膝を曲げる方向に漸増する第1目標角軌道に追従するように遊脚の脚装具を制御し、遊脚の膝位置が前記予め定められた位置に到達してから遊脚着床までは膝を伸ばす方向に漸増する第2目標角軌道に追従するように遊脚の脚装具を制御する。この歩行補助装置は、遊脚膝関節が決められた位置に到達したときに膝関節に加えるトルクを反転するので、ユーザに違和感を与えることがない。
(もっと読む)
動作補助装置
【課題】上肢に配設された上肢リンクから作用する力によって、利用者が意識しない動作が発生することを抑制可能な動作補助装置を提供する。
【解決手段】利用者の体重の一部を支える着座部1と、利用者の足平に装着される足平脚装着部2,2と、足平装着部2,2を着座部1に連結する脚リンク3,3と、脚リンク3,3を着座部1に対して揺動自在に連結する第1関節6,6と、利用者の手首に装着される手首装着部4,4と、手首装着部4,4を着座部1に連結する上肢リンク5,5と、上肢リンク5,5を着座部1に対して揺動自在に連結する第2関節7,7と、脚リンク3,3の膝関節34を駆動させる駆動機構8とを動作補助装置100が備える。上肢リンク5,5から第2関節7,7を介して着座部1に作用する力に起因して着座部1が脚リンク3,3に対して揺動するのを抑制する位置に第2関節7,7を設ける。
(もっと読む)
気道に沿って組織構造を拘束および/または支持する装置、システム、および方法
装置、システム、および方法は、気道に沿って組織構造を拘束および/または支持する。本発明の一側面は、所望の配向で下顎および/または頭部を機械的に支持する、装置、システム、および方法を提供する。装置、システム、および方法は、頭部の移動を拘束して、舌および口腔底の中、上、または付近の組織構造の気道の中への陥没に積極的に抵抗し、それにより、睡眠時無呼吸の発生を加減または予防する。本発明の別の側面は、咽頭気道自体の壁に沿って、頸部の中、上、あるいは付近の組織構造を外部から補強する、装置、システム、および方法を提供する。装置、システム、および方法は、咽頭気道を避けた所望の配向で、頸部の中、上、または付近のこれらの組織構造を機械的に支持する。 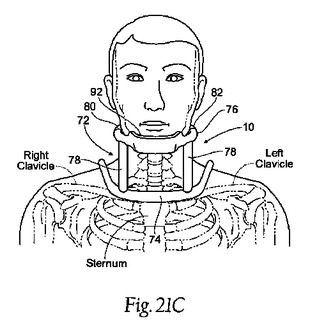 (もっと読む)
(もっと読む)
大腿切断患者用自動義足
切断患者の大腿連結部(100)に適用される大腿義足(P)であって、患者の大腿連結部に連結される上部ヒンジ(1)、膝の動きを再現する機能を有する関節軸(2)、大腿部に駆動可能に連結する脛骨・ふくらはぎ筋肉装置(3)およびふくらはぎ筋肉の機能をいくらか再現し、義足がブレーキをかけ、歩行の典型的な連続したスイングとスタンス段階を可能にするダンパ(5)とを備える。ダンパはシリンダ(5c)を備え、ピストン(10)およびステム(9)が互いに連結作用して、義足にかかる力に対応して、該ダンパの減衰反応をもたらす。特に、力変換器はダンパ、特にステムに設ける。マイクロプロセッサは変換器から力信号を受信し、検出された力信号に応じてダンパの反応を調整する手段を作動させる。 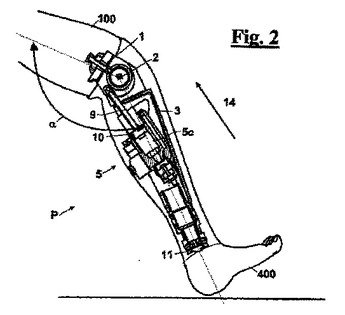 (もっと読む)
(もっと読む)
運動補助装置
【課題】演算処理負荷の軽減を図りながら、当該エージェントの運動を補助することができる装置を提供する。
【解決手段】アクチュエータ15の動作の制御基礎としての基礎振動子ξを生成するための演算処理に一のモデルのみが用いられるので、当該一のモデルに加えて他のモデルが用いられる場合と比較して当該演算処理の負荷が軽減されうる。さらに、モデルからの出力振動信号である基礎振動子ξの角速度または位相の時間変化率に反映される固有角速度ωが、このモデルへの入力振動信号である運動振動子φにより定義されるエージェントPの運動周期Tに基づき、連続的または断続的な減少関数にしたがって流動的に設定される。そして、最新の固有角速度ωにより定義されるモデルにしたがって基礎振動子ξが生成され、この基礎振動子ξに基づいてアクチュエータ15からエージェントPに伝達されるトルクτの振幅および位相が制御される。
(もっと読む)
運動アシスト装置および歩行アシスト装置およびそれらに用いられるアクチュエータユニット
【課題】歩行アシスト装置のアクチュエータユニットに障害物が当たっても、アクチュエータユニットのアクチュエータや内蔵品、歩行アシスト装置着用者に大きい衝撃荷重が作用しないようにすること。
【解決手段】アクチュエータ100L、100Rの外側を覆蓋する外側カバー110L、110Rを、弾性変形による衝撃吸収性を有するものとする。
(もっと読む)
義肢のソケットの製造方法
【課題】樹脂シートを加熱して軟化させることを要せずに簡便に形成することのできる義肢のソケットの製造方法を提供する。
【解決手段】足や手の切断部Sに外嵌されるソケット20を有する義肢の前記ソケット20の製造方法であって、水硬性樹脂を含浸させた基布21を前記切断部Sに被せ、前記水硬性樹脂を硬化させる。また、足や手の切断部Sに外嵌されるソケット20を有する義肢の前記ソケット20の製造方法であって、水硬化性樹脂を含浸させた基布を前記切断部Sから型取りした型に被せ、前記水硬性樹脂を硬化させる。
(もっと読む)
ノイズ除去装置、ノイズ除去方法および動作補正装置
【課題】時間変化するノイズ信号を除去し得る動作補正装置を提供する。
【解決手段】食事支援装置は、マニピュレータに対する動作に応じた主信号および振戦信号を含む入力信号INを出力する力覚センサと、力覚センサから出力された入力信号INが入力される入力手段15とを備える。また、振戦除去システム18として、全域通過フィルタAPFを適用したノッチフィルタに入力した入力信号INの出力を最小とするタップ係数を更新することで、時間変化する振戦信号の各時刻での周波数に対応する推定周波数ft(i)を決定する振戦周波数推定手段42を備える。そして、振戦周波数推定手段42で決定された推定周波数ft(i)に基づき決定される遮断フィルタにより、振戦除去手段44が入力信号INから振戦信号を除去して出力信号OUTを生成する。
(もっと読む)
歩行補助装置
【課題】耐久性、回動精度、追従性に優れた歩行補助装置を提供する。
【解決手段】歩行補助装置Aの駆動機構9は、上側リンク部材5に搭載された電動モータ16によりナット部材20,22が回転駆動され、これによりナット部材20,22の軸心方向に直動する直動出力軸14aを備える直動アクチュエータ14、及び、第3関節8の関節軸と同軸心に下側リンク部材7に固定され、直動出力軸14aの一端に枢着されたクランクアーム30を有し、直動アクチュエータ14の直動出力軸14aから出力される並進力をクランクアーム30を介して第3関節8の回転駆動力に変換するように構成される。
(もっと読む)
歩行補助装置
【課題】装置が脚に能動的にトルクを加えるときに使用者が感じる不安を和らげる歩行補助装置を提供する。
【解決手段】歩行補助装置は、左右の装具とコントローラとヘッドフォンを備える。装具は、使用者の脚の動きを検出するセンサと、使用者の脚の関節にトルクを加えるモータ26を有している。コントローラは、目標関節角の経時的変化を示す目標パターンに従って装具を制御する。また、コントローラは、目標パターンにおける目標関節角の経時的変化が予め定められている条件を満たす変化タイミングを特定し、特定された変化タイミングに先立って変化タイミングの到来を使用者に報知する。アクチュエータが動作するのに先立ってその動作を報知することによって、アクチュエータが能動的に脚関節にトルクを加えるときに使用者が感じる不安を和らげる。
(もっと読む)
81 - 100 / 270
[ Back to top ]