
Fターム[4C097BB02]の内容
Fターム[4C097BB02]に分類される特許
61 - 80 / 270
義肢用インナーバッグ

【課題】 従来の義足のインナーバッグでは、吸着式の場合には断端部の発汗が問題となるって非常に装用感が悪かった。また金属ピン方式が現在主流であるがこれは、インナーバッグ外面とソケット内面とを密着させることなく義足保持を行なうものであって断端はインナーバッグに密着させねばならず装用感の改善に関しては特段の貢献はしていないものであった。
【解決手段】 通気性を有する繊維布製本体の内外表面の少なくとも除圧を要する部分に、多数の独立するシリコーンラバー突起を形成させたものであることを特徴とする義肢用インナーバッグ。
(もっと読む)
動力装置、動力システム、および動力制御方法

【課題】小容量のバッテリを用いつつ、かつ、稼働時間を延ばすことができる動力装置を提供する。
【解決手段】体部位の動作に合わせて可動する可動手段10と、身体部位の第1動作方向への動作時に、可動手段10を第1動作方向へ可動させるように可動手段10に対して動力を出力し、身体部位の第2動作方向への動作時に、可動手段10の第2動作方向への可動で生じる動力を回生するモータ20と、動力の回生によって生じた回生電力を蓄電し、モータ20が可動手段10に対して動力を出力する際に蓄電した回生電力をモータ20に供給するキャパシタ40と、を有する動力装置。
(もっと読む)
義足
フォアフットばねと、ヒールばねと、ベースばねとが設けられた義足である。ベースばねは、ヒールばね及びフォアフットばねに接続されている。ベースばねは、フォアフットばね及びヒールばねのための受け手段を有し、フォアフットばね及びヒールばねは受け手段に挿入されている。ヒールばねは、結合部材を介してフォアフットばねに接続され、結合部材は、その一部分を介して、少なくとも、フォアフットばねに沿って前方に延びている。 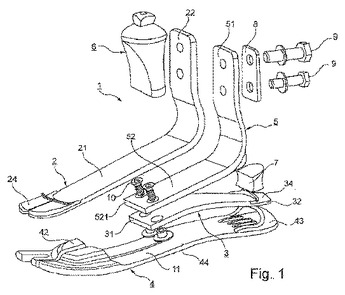 (もっと読む)
(もっと読む)
義足の調整を検査するためのおよび義足を調整するための方法ならびに義足における力またはモーメントを測定するための装置
【課題】補装具の心合せが大腿義足を改善し、特に、歩行の立脚相のための、補装具の好都合な心合せを、算出かつ調整することができるための方法および装置を提供する。
【解決手段】人工膝関節3は、足部が取着されている下腿シャフト4を、人工膝関節3を大腿の断端に取着するための大腿シャフト2と、関節軸31を中心として旋回自在に結合しており、大腿シャフトは、関節軸31に対し移動可能である。膝モーメントと、下腿シャフト4に作用する軸方向力とが、補装具の使用中に、複数のセンサ10,11によって測定される。これらの変数からは、大腿シャフト2に作用点を有する、合成された力ベクトルが算出される。
(もっと読む)
義肢及び義肢用ライナー
【課題】容易な装着作業を通じて手足の断端部に義肢を装着することができるとともに、簡易な構成をもってその正常な装着状態を維持することのできる義肢を提供する。
【解決手段】義足1は、足の断端部Sが挿嵌可能な挿嵌部4を有したソケット3を備える。また、ソケット3の内側面には、ソケット3の挿嵌部4に断端部Sを挿入する方向Bに傾斜する繊維状部材41が設けられる。
(もっと読む)
下肢の矯正用または補装用の関節を制御するための方法
本発明は、抵抗手段を有する、下肢の矯正用または補装用の関節を、制御するための方法であって、該抵抗手段に関連して、センサデータに従って屈曲抵抗および/または伸展抵抗を変化させる少なくとも1つのアクチュエータが設けられており、関節の使用の最中に、センサによって、状態情報が提供されてなる方法に関する。センサデータは、少なくとも2つのモーメントまたは1つのモーメントおよび1つの力を検出するための少なくとも1つの手段によって決定される。決定された値のうちの少なくとも2つの値のセンサデータが、数学的操作によって互いに組み合わされ、従って、屈曲抵抗および/または伸展抵抗の制御に基づく少なくとも1つの補助変数が計算される。 (もっと読む)
矯正用または補装用の人工の膝関節を制御するための方法および装置
本発明は、抵抗手段を有する、下肢の矯正用または補装用の人工の関節を、制御するための方法であって、該抵抗手段に関連して、センサデータに従って屈曲抵抗および/または伸展抵抗を変化させる少なくとも1つのアクチュエータが設けられており、関節の使用の最中に、センサによって状態情報が提供されてなる方法と、該方法を実施するための装置とに関する。下腿部分の、垂直線の方向に減少する慣性角度と、同時に負荷された前足とが決定されるとき、屈曲抵抗が、立脚期において増加または減少されないことが意図されている。 (もっと読む)
補てつ肢又は装具用の取り換え可能なフェアリング
フェアリングは補てつ肢又は装具の外観を変えるため補てつ肢又は装具上に取り付けられる。補てつ肢の外面は完全な肢のミラー画像であってもよく、該装具の外面は負傷肢に対応する外面を有してもよい。フェアリングは補てつ肢又は装具の周りに密接に適合するので、該フェアリングの内面は完全な肢のミラー画像又は負傷した肢の外面に対応する表面を有する。 (もっと読む)
装着型筋力補助装置
【課題】構造が簡単でかつ軽量であり安価に製造することができる装着型筋力補助装置を提供する。
【解決手段】装着型筋力補助装置は、人体に装着して固定される外骨格部を備えており、この外骨格部は、人体の複数の骨位置と対応する位置にそれぞれ配置される複数の骨部材と、人体の複数の関節位置と対応する位置にそれぞれ配置されており、各々が複数の骨部材のうちの2つを連結する複数の第1の回動ジョイント部材とを備えている。複数の第1の回動ジョイント部材の各々は、連結された2つの骨部材を回動自在に支承する支点と、2つの骨部材間の角度が減少する際に弾性エネルギを保存し、その角度が増大する際に弾性エネルギを放出するばね部材とを備えている。
(もっと読む)
エピテーゼ製作方法及び該製作方法によって製作されたエピテーゼ
【課題】短時間で完成させることができ、熟練によらずに安価に製作することができるエピテーゼの製作方法を提案する。
【解決手段】患者の顔面欠損部を含む欠損模型を作製し、欠損模型から、合成樹脂シートを用いて顔面形態支持フレームを作製し、患者の顔面画像をコンピュータに取り込み、顔面画像の欠損部に対応する健常側の左右対称の部位を反転させて欠損部画像とし、この欠損部画像を熱転写シートに印刷し、反転させた部位の画像を印刷した熱転写シートを伸展性シートに転写し、伸展性シートを前記顔面形態支持フレームに接着してエピテーゼとする。
(もっと読む)
動作補助装置
【課題】人の動作を適切に補助することのできる動作補助装置を提供する。
【解決手段】動作補助装置は、人の特定関節にトルクを加えるアクチュエータ、記憶ユニット、センサ、及び、アクチュエータを制御するコントローラを備える。センサは、人の予め定められた既定部位の動作パターンを計測する。記憶ユニットは、既定部位の異なる動作パターンの夫々を記述した第1動作パターン群を記憶している。さらに、記憶ユニットは、特定関節の異なる第2動作パターン群の夫々を実現するための目標角度パターンを第1動作パターン群の夫々に対応付けて記憶している。コントローラは、計測された動作パターンに最も近い第1動作パターンを第1動作パターン群の中から選択する。コントローラはさらに、選択された第1動作パターンに対応付けられている目標角度パターンに、特定関節の角度を追従させるようにアクチュエータを制御する。
(もっと読む)
人間把持支援デバイスおよび使用方法
【課題】本発明は、人間把持支援デバイスおよび使用方法を提供することを目的とする。
【解決手段】把持支援デバイスが、指骨リングを有するグローブ部分と、グローブ部分を着用しているオペレータにより加えられる把持力を測定するための接触センサと、腱駆動システム(TDS)とを備える。このデバイスは、センサからのフィードバック信号に応じてリングを動かすための、指骨リングに連結された可撓性腱を有する。TDSは、腱のそれぞれに連結され、把持力に応じて増強引張力を決定するように適合されたマイクロコントローラを介して、腱に対して増強引張力を加える。オペレータの把持力を増強する方法は、センサを使用して把持力を測定するステップと、フィードバック信号として把持力をエンコードするステップと、マイクロコントローラを使用してフィードバック信号に応じて増強引張力を計算するステップとを含む。この方法は、腱駆動システム(TDS)の少なくとも1つのアクチュエータに通電して、増強引張力を加えるステップを含む。
(もっと読む)
義指装置
【課題】 物品を確実に把持することが可能な義指装置を安価に提供する。
【解決手段】 指骨格12を第1アクチュエータ71で屈曲・伸長し、指骨格12を覆う袋体52〜55内部に粉体を充填し、指骨格12の屈曲後に袋体52〜55の内部を第2アクチュエータ73で真空引きして固化するので、袋体52〜55が固化していない状態で指骨格12を屈曲させて義指を物品の表面に当接させ、柔軟な袋体52〜55の形状を物品の形状に沿うように馴染ませた後に袋体52〜55を固化することで、特別に強い把持力を必要とせずに物品を確実に把持することができる。しかも第1アクチュエータ71は指骨格を屈曲・伸長させることが可能であれば、センサ等を用いて義指の把持力や屈曲量を制御する等の複雑な制御を行う必要はなく、また第2アクチュエータ72は袋体52〜55の内部を真空引できるものであれば良いため、極めて低価格で実現することができる。
(もっと読む)
義足または下肢装具を用いて立ち上がりのシーケンスを実装すること
膝装具または義肢は、人が座位にいる間に、人の足関節に対する人の膝の位置に基づいて立ち上がりのシーケンス始動させるのが適切であるときに、自動的に使用され得る。膝が、足関節の前である位置に動かされるときに、装具または義肢の少なくとも1つのアクチュエータが、座位から立位へ人を持ち上げることを助けるように作動される。少なくとも1つのセンサーは、大腿座標システムに対して重力ベクトルを測定する慣性センサーを含む。少なくとも1つのセンサーは、大腿に対して下肢の回転角を検出する。 (もっと読む)
短下肢装具
【課題】靴と干渉する出っ張りがなく、軽量な、装着感の良い短下肢装具を提供すること。また踝関節が自由に回転できて足首が動き、構造が簡便で、製作の容易な短下肢装具を提供すること。
【解決手段】
足を下から支えるのでは無く、添体を脛および足の甲の側に配置して足を吊り上げる構造とした。また、踝関節が回転できるよう、添体を脛添体と甲添体の2つに分けた。2つの添体を踝関節の回転軸の延長上に配置した回転ベアリングで接続するのではなく、新たに考案した可動連結機構を脛添体と甲添体の間、すなわち踝関節の前に配置し、脛添体と甲添体を可動になるように接続した。また同様に、足を吊り上げるための力発生機構を備えて、足裏面を水平にする方向の力を発生し、甲添体を前記脛添体に対して決められた位置に保持した。可動連結機構と力発生機構は弾性部材を使い簡便な構造とし、歩行を円滑にする短下肢装具を実現した。
(もっと読む)
関節用能動装具
【課題】変形性膝関節症の患者である装着者に廃用、装着感、血行障害を生じさせずに痛みを伴うことなく、筋力の増強につながる運動が行える装具を提供する。
【解決手段】膝の外側部にあてがわれるセンサ部2を引っ張る第1アクチュエータ部9〜12を備え、第1アクチュエータ部9〜12で生成される各分力fxを合成した力で膝の外側部を内側に押圧するようにした。また、膝関節にかかる荷重のうち左右方向の分力を荷重分力として検出するセンサ部2を備え、このセンサ部2より検出された荷重分力と同じ大きさの抗力を第1アクチュエータ部9〜12で発生させるようにした。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
電動義手
【課題】軽量でかつ製造コストの低い電動義手を提供することを目的とする。
【解決手段】独立して駆動され、骨格部と駆動機構を各々が備える複数の指部と、複数の指部を駆動するアクチュエータと、を備え、骨格部が繊維強化プラスチックから構成される電動義手。この骨格部は、関節部分が繊維強化プラスチックからなるヒンジ機構からなることが好ましい。複数の指部の付け根側を固定、保持する手掌部を備える場合には、手掌部は、独立して動く複数の領域に区分されていることが好ましい。この場合、手掌部は、繊維強化プラスチックから構成され、隣接する前記領域が当該繊維強化プラスチックからなるヒンジ機構により接続されていることが好ましい。
(もっと読む)
心臓病態を治療するための補助及びリコイル機能を備える二相性及び動的調整可能サポートデバイス及び方法
本発明は、鬱血性心不全及び関連する心臓病態に罹患している患者に移植されるように適合した直接心臓接触デバイスであって、心室補助、心室サポート及び拡張期リコイルを提供する、又は心室サポート及び拡張期リコイルのみを提供する手段を有する心臓デバイスを提供する。  (もっと読む)
(もっと読む)
圧縮気体を使った人工筋肉
【課題】人工筋肉の実用化には、よく縮み、強い力が取り出せれば小型化が可能になり、介護、リハビリ用補助器具として違和感無く使う事が出来る。しかし従来の空気圧人工筋肉は収縮率が低くまた被せる繊維は外周を大きく膨らますと、糸の絡み目が糸ズレして網目が広がり弱い部分が出来るので、そこに圧力が集中し中のチューブが爆裂して耐圧に問題がある。
【解決手段】網目繊維(組紐レース)とその内側のチューブからなり、繊維の構造には丈夫で結び目が小さくて糸ズレしない組紐レースを使い、その組紐レースをチューブの外周に被せて膨張体を作り、膨張体の外周より小さい内径の組紐レースを収縮体として膨張体の外周に被せると、膨張体はゴムチューブと違い、縮みながら外側の収縮体を押し広げ30%を超える収縮率が実現出来る。
(もっと読む)
61 - 80 / 270
[ Back to top ]