
Fターム[4C097BB02]の内容
Fターム[4C097BB02]に分類される特許
41 - 60 / 270
歩行補助装置
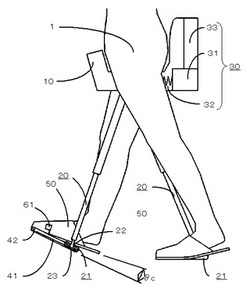
【課題】履き心地、耐久性に優れ、エネルギー効率も良好な歩行補助装置を得ることを目的とする。
【解決手段】装着者の体重を支える補助脚の先端を足装着部の動きに追従する様に接続し、足装着部の立脚時に接地する部分と補助脚先端との、補助脚の伸縮方向の相対変位に基づいて補助脚の伸縮力を制御する様にして制御の元となるセンサを足装着部から外に出し、足装着部を柔軟で快適なものにするとともに、立脚期には補助脚の伸縮をロックすることにより、エネルギー効率を良くした。
(もっと読む)
装着式動作補助装置及びその制御方法

【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】装着式動作補助装置1は、複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる動作補助装着具10を備えるとともに、動作補助装着具10による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
発声補助器具
【課題】声帯のやや下方近傍に開口した気管切開口を有する患者であっても自発呼吸による自然な会話を可能にするとともに、異物等の肺への侵入を防止可能で安全性が高い発声補助器具を提供する。
【解決手段】気管切開口から気管内に挿入される気管内チューブと、気管内チューブに設けられるカフと、患者の発声用気体を導く発声用導管とを備える気管挿入カニューレに連結され、患者の自発呼吸よる発声を補助する発声補助器具であって、前記気管内チューブの他端に連結されて、前記気管内チューブに吸気を導く呼吸用導管と、患者の吸気時に前記呼吸用導管を大気に連通させ、呼気時に前記呼吸用導管と大気とを遮断する一方弁と、前記呼吸用導管内の圧力が所定の圧力に達すると、前記呼吸用導管を大気に連通させるリリーフバルブと、前記発声用導管の他端側を前記呼吸用導管に連通接続させる接続部とを備える。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
動作アシスト装置及び装着具
【課題】アシスト力を発生させるためのアクチュエータが不要で、利用者が装着している状態においてもアシスト機能の遮断が可能な動作アシスト装置を提供する。
【解決手段】互いに揺動可能な複数の背骨部材3を連結してなり、利用者の背中に装着される背骨ユニット2と、利用者の前屈姿勢時に復元力を発生させる作用状態と復元力を発生させない非作用状態とに切り換え可能で、背骨ユニット2に取り付け可能な弾性部材7と、を備えた。
(もっと読む)
円弧状レールの製造方法
【課題】円弧状の内周壁及び外周壁と、両周壁をその側縁で連結する一対の側壁と、内周壁又は外周壁の中央部に長手方向に沿って形成されたスリットとを有する断面C字状の円弧状レールを、金属製薄板を用いて適切に製造する。
【解決手段】金属製薄板状のリングRをスピニング製法で折り曲げることにより側壁313及びスリットにより分割された内周壁又は外周壁の幅方向両側の分割周壁部分312の一方を形成する第1工程と、スリット314の幅以下に幅方向に分割された複数の中子41〜43を用いて、中子41〜43を包み込むようにして、スピニング製法により側壁313及び分割周壁部分312の他方を形成する第2工程と、スリット314から複数の中子41〜43を個別に抜き去る第3工程とを備える。
(もっと読む)
上肢運動モデル
【課題】応答性能を向上させることができ、比較的急速な運動であっても良好な再現性が得られ、上肢の動作特性を十分に表現することができる上肢運動モデルを提供する。
【解決手段】所定の回転軸を中心に回転する目標指針に、該目標指針と同軸回転するリンクを追従させる位置決め操作にともなう人間の上肢の動作をモデル化した上肢運動モデルであって、目・脳モデル化部13と、上肢モデル化部14と、インターフェイスモデル化部12とを備え、目・脳モデル化部13に誤差補償感度係数βにより調整されるフィードフォワード項を有し、上肢モデル化部14に力覚フィードバック結合特性α(s)によるフィードバック項を有することで、視覚・力覚混合型フィードバックモデルとして構成される。
(もっと読む)
ヒアルロン酸誘導体を含んでいる三次元人工器官及びそれらの調製方法
【課題】人体の部位の再形成のため三次元人工器官を提供することである。
【解決手段】耳介、鼻、咽頭、喉頭、気管、関節、眼窩、心臓弁、乳頭、臍、内臓とそれらの部分、及び二次生殖器官からなる群から選ばれる複雑形状である人体部分の形状をとる三次元人工器官において、
前記三次元人工器官は本質的に繊維質又は多孔質構造を有しており且つ少なくとも一つのヒアルロン酸誘導体を含んでいる少なくとも一つの三次元基質より成っており、
前記三次元基質の少なくとも二つを含む場合の前記人工器官は、該三次元基質の第一が第二及び可能なそれ以上の基質を包含する及び/又はこれに接着されており、
少なくとも前記ヒアルロン酸誘導体が、ヒアルロン酸のエステル類、架橋エステル、架橋化合物、第4級アンモニウムのような特定のヒアルロン酸誘導体である三次元人工器官。
(もっと読む)
断端に装着したライナーの義肢ソケットへの取付構造
【課題】 従来にあっては、使用者がロックピン付きライナーを装着するに際し、装着状態において差し込みロックピンが断端から真っ直ぐな状態になっていないと、ロックピンの先端を収容部の差し込み孔に差し込むことが困難となるため使用者がライナーを装着することが非常に面倒であると共に時間が掛かり、また、ソケットに装着できたとしてもその場合は断端に負担が掛かるといった問題があった。
【解決手段】 義肢ソケット3の下部に取付けられたロックピン係止手段4と、該ロックピン係止手段にロック可能に挿入される溝61が形成されると共に上端に吸着板62が形成されたロックピン6と、ライナー1の下部に取付けられ該ライナーが前記義肢ソケット内への挿入途中で前記ロックピンの吸着板と一体となる脱着手段2とより構成した断端に装着したライナーの義肢ソケットへの取付構造である。
(もっと読む)
筋力補助装置
【課題】用途や負荷に応じて関節を硬くしたり、柔らかくすることができる筋力補助装置を提供すること。
【解決手段】関節の一方の骨に沿って配置される第1の装着具11と、関節の他方の骨に沿って配置される第2の装着具21と、第1の装着具11と第2の装着具21とを連結する流体圧式弾性体関節30とを備え、流体圧式弾性体関節30内の流体の充填圧を変更することで流体圧式弾性体関節30の弾性力を変化させることを特徴とする。
(もっと読む)
下肢装具
【課題】歩行動作中の足の状態に応じて中立揺動角を変更することのできる下肢装具を提供する。
【解決手段】下肢装具10は、下腿部材12と、足部材14と、コイルバネ22と、コイルバネの中立揺動角を変更できる調整部20を備える。調整部20は、足部材14が接地している場合の中立揺動角を、足部材14が接地していない場合の中立揺動角よりも底屈側に変更する。こ下肢装具10は、中立揺動角を底屈側に変更することによって、立脚の下腿が足を中心として前方へ揺動する際(即ち足が背屈する際)、下腿の揺動を抑える向き(足を底屈させる方向)に加わるバネ復元力を変更する前に比べて増大させることができる。
(もっと読む)
競技用義肢
【課題】空気抵抗や渦損を少なくして早く走ることができる競技用義肢を提供すること。
【解決手段】断端部が挿入されるソケット2とソケット2から下方に延びる下腿部3aと足部3bとを構成する前方に湾曲した板バネ3を有し、板バネ3の前面及び或いは後面に空気抵抗を抑制する空気抵抗抑制部材4a、4bを備えることを特徴とする競技用義肢。
(もっと読む)
機器制御装置、機器システム、機器制御方法、機器制御プログラム、および記録媒体
【課題】脳信号による機器制御において、長時間の訓練を不要とし、脳情報量が限られていても機器の自然な動きを実現する。
【解決手段】機器制御装置(20)は、使用者が施行した運動と脳信号の情報との対を用いた学習に基づき、使用者が第1〜第nの身体状態を目標とする運動の何れを施行または想起しているかを脳信号の情報から推定する第一デコーダ5と、脳信号の情報と運動推定の正解率との対を用いた学習に基づき、運動推定の正解率を脳信号の情報から推定する第二デコーダ6と、電動義手60の状態を第1〜第nの身体状態に対応する第1〜第nの身体状態の間で中間状態を経て変化するよう多段階制御する電動義手制御部8とを備え、第一デコーダ5、推定正解率が閾値を超えている時のみ推定を行い、電動義手制御部8は、現在と別の状態に対応する身体状態への運動が第一デコーダ5で推定されたときに、電動義手60の状態を上記別の状態へ1段階近づける。
(もっと読む)
視覚再生補助装置
【課題】 複数の電極を効率よく視神経乳頭に取り付ける事ができ、長期間安定して扱うことのできる視覚再生補助装置を提供する。
【解決手段】 患者の視覚を再生するための視覚再生補助装置は、患者眼の視神経乳頭に突き刺して使用するために所定の長さだけ延びた針状の複数の電極が形成された筐体と、電極を視神経乳頭に突き刺した状態を維持するために電極とは別部材であって電極が延びる方向と同じ方向に伸びるように筐体に形成される針状の固定部と、を備える。
(もっと読む)
バストパッド
【課題】異なる使用目的への汎用性と個人への適合性とを有し、人体への安全性を確保すると同時に、乳房を失った女性のメンタルケアにも寄与することができるバストパッドを提供する。
【解決手段】乳房の形状及び重量を補整するためのバストパッド1であって、乳房の膨らみを模した形状に成形され、成形された形状の保持及び復元が可能な薄いシート材21を有する上側パッド部20と、この上側パッド部20に対応する外形を有し、表裏布地32a、32bの内部に厚い不織布31を圧縮した状態で封入した下側パッド部30と、通気性を有する小袋41内に多数の粒状宝石42を移動可能に収納した重量調整部材40と、を備え、上側及び下側パッド部20、30の周縁部を互いに接合し、周縁部の一部に開口部11を形成しつつ、全体を中空の軽量パッド10とし、開口部11を介して軽量パッド1の中空部12内に重量調整部材40を出し入れ可能に収納した構成としてある。
(もっと読む)
装着式動作補助装置
【課題】本発明は消費電力が小さく、小型化及び軽量化された装着式動作補助装置を提供することを課題とする。
【解決手段】装着式動作補助装置10は、発生部20と、回転軸30と、弾性部材40と、コイル50と、補助力制御部60と、第1結合部材70と、第2結合部材80とを備えている。弾性部材40は、回転軸30とケース22との相対回転により弾性力を蓄積する。また、力発生部20では、装着者の足が屈曲状態から伸長状態に動作する過程で弾性部材40の弾性力が回転軸30を回転させる駆動力(補助力)となって伝達される。切替スイッチ110をオンに切替えると、コイル50が励磁されて磁気粘性流体100が固化されるため、回転軸30及び弾性部材40が静止状態に保持される。また、コイル50の磁場によって保持された弾性部材40の弾性力は、切替スイッチ110をオフに切替えてコイル50への電流をゼロに切替えることで、開放される。
(もっと読む)
シリコーンプレポリマーの製造方法
【課題】異なる重合性官能基を有するモノマーの重合速度を揃えて重合することにより、均一な組成を有するプレポリマーを提供する。
【解決手段】(メタ)アクリロイロキシ基等を有するモノマーからなる群をA群、アクリルアミド基等を有するモノマーからなる群をB群とし、A群、B群それぞれから少なくとも1種類以上のモノマーを選んで共重合させる場合において、少なくとも1種類が親水性モノマーであり、かつ少なくとも1種類のモノマーが分子内に少なくとも一つの反応性官能基を有するモノマーであり、かつ、A群、B群からそれぞれ1種類ずつ選ばれたモノマーaおよびモノマーbにおいて、重合開始から重合終了時間までのモノマーaおよびモノマーbのそれぞれのモノマー消費率(%)の差の平均値を7.15以下になるように重合させることを特徴とするシリコーンプレポリマーの製造方法。
(もっと読む)
義足のソケット部
【課題】加齢や疾病、簡易な手術の戦災傷などで、切断足の痩せて骨ばった中高年者向きの義足のソケット部を提供する。
【解決手段】在来のソケット部を見直し、外ソケットと内ソケットに分けた仕組みを用いて、加齢などで不足をきたした断端の緩衝層であるところの、皮下組織を補うために、ソケット内壁の平面や突部等で断端側面の中央部分を適度に圧迫して皮下組織をソケットの上端部分や下端部分などに押し出して活用することで、ソケット部は収納した断端とのつながりを密にして、断端を収納した義足の運動性が増し皮膚などの擦れ傷みが少なく、さらに多用途の突部がもうけられて自己懸垂性も大きいことを特徴とする。
(もっと読む)
動作補助装置
【課題】人の関節に適切なトルクを付与して動作を補助する動作補助装置を提供する。
【解決手段】動作補助装置は、記憶モジュール、人の関節の角度を計測するセンサ、特定関節にトルクを加えるモータを有する装具、制御器を備える。記憶モジュールは、人の動作に伴って実現されるn個の関節角の第1時刻から第2時刻までの既知軌道群と、各既知軌道に対応するs次元の既知時系列データ群を記憶している。制御器は、計測されたn個の関節角の時系列データによるn次元計測軌道を取得し、その計測軌道に対応するs(n>s)次元の計測時系列データを算出する。制御器は、中間時刻までの各既知時系列データを計測時系列データと比較し、計測時系列データに最も近い既知時系列データを特定し、中間時刻以後に設定されている時刻以降に、特定された既知時系列データに対応する既知軌道における特定関節の軌道に、特定関節の角度が追従するようにモータを制御する。
(もっと読む)
41 - 60 / 270
[ Back to top ]