
Fターム[4C097BB02]の内容
Fターム[4C097BB02]に分類される特許
21 - 40 / 270
作業用補助具
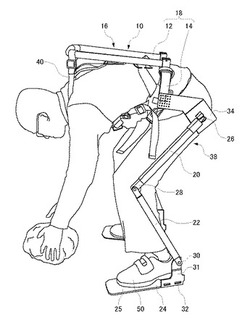
【課題】作業者への補助力を向上させた作業用補助具を提供する。
【解決手段】作業用補助具10において、ベース機構38は、作業者の足裏と地面の間に配される底部24を有する。吊り機構16は、ベース機構38により支持され、作業者の背面側に配される吊りフレーム18を有する。連結部は、吊り機構16とベース機構38とを回動可能に連結する。規制手段は、吊り機構16が傾倒してベース機構38の連結部分に対して所定の角度まで回転すると、吊り機構16の傾倒を規制する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】歩行アシストにおいて、より適切な省エネ制御を行う。
【解決手段】歩行アシスト装置1は、目的地までの全歩行経路を取得し、歩行距離を元に通常のアシストを行った場合に必要な電力量を求める。そして、バッテリ18の残量が目的地に到達するまでの歩行アシストに足りない場合、地面から離れている遊脚のアシスト力を低減してバッテリの消費を低減し、目的地までアシストを継続する。装着者Mの負担が小さいのは、坂道を下るときであり、また、遊脚と立脚では、遊脚のアシスト力を低減した場合の方が装着者Mの負担が小さいと考えられる。そこで、下り遊脚、平地遊脚、下り立脚、平地立脚の順にアシスト力の低減を行うことで、目的地までバッテリが足りるアシスト方法を選択し、実行する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より段差の高い階段をも上ることができるようにする。
【解決手段】通常階段を上る場合、太ももを持ち上げるとともに膝を曲げることで、膝から下の脛の部分を鉛直方向に垂らした状態で足を階段の上に乗せながら上っている(膝曲げ上り)。このため、足を最大上げた場合の高さh1が階段の段差Hよりも高く上がらないと階段を上ることができない。そこで股関節を限界角度θ1まで上げた状態でも足を階段の高さよりも高く上げられない場合には、膝を伸ばすことで足をより高く(h2)上げながら階段を上るようにする(膝伸ばし上り)。
(もっと読む)
脚補助装置
【課題】 簡単な構造で実用的に使用できる脚補助装置を提供する。
【解決手段】 脚補助装置1は、装着者Pに装着する装着部2と、装着者Pの左右の足をそれぞれ支持する左右の足部3と、装着部2と左右の足部3とをそれぞれ連結する左右のエアシリンダ5と、左右のエアシリンダ5内の圧力をそれぞれ調節する左右の圧力調節部7と、左右の圧力調節部7を作動させる左右のスイッチ8と、を有することを特徴とする。
(もっと読む)
人間型ハンド
【課題】実用性を高めた簡潔構造の人間型ハンドを提供することである。
【解決手段】手の骨格を有する人間型ハンド100において、前記人間型ハンド100の掌骨格に複数の掌部2、3、4を固定し、前記複数の掌部2、3、4のそれぞれが、シート部材21、31、41に弾性部材22、23、24、32、42を貼付して成り、前記人間型ハンド100によって対象物を掴む際に、前記複数のシート部材2、3、4同士が重なり合うとともに該シート部材21、31、41が撓んで、前記弾性部材22、23、24、32、42が前記対象物を支持することを特徴とする。
(もっと読む)
義手
【課題】簡単な構成でより人間の手に近い動作範囲が得られる義手を提供する。
【解決手段】人差し指に該当する第一義指2と、中指に該当する第二義指3と、薬指に該当する第三義指4と、小指に該当する第四義指5と、親指に該当する第五義指6と、各義指を支持する基台1・25とからなり、第一ないし第四義指には、末節骨に該当する第一部材7と、第一部材に回動自在に軸支される中節骨に該当する第二部材8と、第二部材に回動自在に軸支される基節骨に該当する第三部材9と、第三部材に回動自在に軸支される中手骨に該当する第四部材10と、第一部材と前記第三部材とを接続する第一連結部材11と、第二部材と第四部材とを接続する第二連結部材12と、第三部材を回動する第一駆動機13とを設ける。
(もっと読む)
可変シート及びこの可変シートを用いた身体装着具
【課題】使用時に外部電源との接続が不要で各種用途に広く使用可能な可変シート及びこの可変シートを用いた身体装着具を提供する。
【解決手段】本発明は、一のフレキシブルシート体2の板面に沿って該シート体2に設けられ、該シート体2を変形させるシート状のポリマーアクチュエータ3と、シート体2の板面に沿ってシート体2に設けられ、ポリマーアクチュエータ3と電気的に接続されたシート状の蓄電素子4と、ポリマーアクチュエータ3と蓄電素子4との間に設けられた制御部6とを備えていることを特徴とする。
(もっと読む)
動作補助装置及び動作補助制御用プログラム
【課題】患者の回復訓練等における補助を自立的且つ安全に行うことが可能な動作補助装置を提供する。
【解決手段】患者の歩行の動作を補助する場合に、患者の脚の膝関節部に装着されており、歩行に伴う膝関節部の屈曲動作及び伸展動作を補助するDCモータ50と、屈曲動作に続く伸展動作中の第一の期間においては第一の駆動力によりDCモータ50を駆動させて伸展動作を補助させ、第一の期間経過後且つ次の屈曲動作が開始される前の第二の期間においては、第一の駆動力より小さい第二の駆動力によりDCモータ50を駆動させて伸展動作を補助させる。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
歩行支援装置
【課題】弾性エネルギを利用する歩行支援装置であってシンプルな構成の歩行支援装置を提供する。
【解決手段】歩行支援装置100は、靴2、靴底前プレート12、靴底後プレート22、及び、スプリング18と28を備えている。靴底前プレート12は、つま先と踵の間の位置で靴の側方に伸びる回転軸16で靴2に軸支されている。靴底前プレートの先端はつま先の下へ伸びている。靴底後プレート22は、つま先と踵の間の位置で靴2の側方に伸びる回転軸26で靴2に軸支されている。靴底後プレート22の先端は踵の下へ伸びている。靴底前プレート12と靴底後プレート22は、連動して互いに反対方向に回転するように係合している。スプリング18と28は、靴底前プレート12の先端と靴底後プレート22の先端を下方へ付勢するように配置されている。
(もっと読む)
人工舌
【課題】 自然な嚥下補助を可能とする人工舌を提供すること。
【解決手段】 中舌部材4と口蓋500との間に食塊を入れて下顎503を閉じると、中舌部材4と口蓋500との間に食塊Sが挟まれ、中舌部材4が全体的に下がり、食塊Sが一時的に保持される。中舌部材4の揺動により、前記L字部材6の短手部分64先端の円柱突起65が前記奥舌部材5の受側円柱突起56に引っ掛かり、奥舌部材5が中舌部材4に係止された状態で一緒に前方に移動し、食塊Sが奥に移動されると共に、咽頭501が開かれ、食塊Sを嚥下する。このようにすれば、嚥下口腔相初期の舌形態を再現できるので、自然な嚥下補助を実現できる。
(もっと読む)
装着式動作補助装置、そのインタフェース装置及びプログラム
【課題】パラメータ設定を容易に行うことのできる装着式動作補助装置、そのインタフェース装置及びプログラムの提供。
【解決手段】装着式動作補助装置は、動力を付与する駆動源132と、生体電位信号に応じた動力を前記駆動源に発生させる第1指令信号を生成する随意制御手段111と、装着者1のタスクのフェーズを特定し、このフェーズに応じた動力を前記駆動源に発生させる第2指令信号を生成する自律制御手段112と、前記第1及び第2指令信号に基づいて駆動電流を生成し、前記駆動源に供給する生成手段131と、前記動力の強弱に対応する座標軸を表示する画面を有する表示手段141と、前記画面内の指定された位置の座標を検出する検出手段143と、前記検出された座標に対応するパラメータを抽出し、抽出したパラメータを随意制御手段111に設定する設定手段121と、を備える。
(もっと読む)
動作制御式足ユニットのためのシステム及び方法
【課題】動作制御された肢、特に、足首が動作制御された義足を有するシステム及び方法を提供する。
【解決手段】補装具100の下肢部材102の下端部は、旋回軸アセンブリ114で足ユニット104と連結される。図示されているように、下肢部材102は、足ユニット104のつま先部から略後方で且つ上向きに延びる足ユニット104の足首板と連結されている。旋回軸アセンブリ114は、下肢部材102に関する足ユニット104の角運動を可能にする。システムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータ116を備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。
(もっと読む)
脚装具
【課題】大腿リンクと下腿リンクの間に皮膚や衣服が挟まれ難い構造の脚装具を提供する。
【解決手段】脚装具100は、ユーザの大腿に取り付けられる大腿リンク20と、ユーザの下腿に取り付けられ、膝関節の側方で大腿リンク20と揺動可能に連結している下腿リンク30を備える。この脚装具100は、直立姿勢のユーザに装着された脚装具100を側方から観測したときに、大腿リンク20と下腿リンク30の連結部12においてそれらのリンクが膝裏側でなす角度が180度以上となるように構成されている。ユーザが膝を屈曲させても、大腿リンク20と下腿リンク30が膝裏側でなす角度は90度以上となり、皮膚や衣服が挟まれ難い。
(もっと読む)
装着型入力装置及び人支援装置及び人支援装置の制御方法
【課題】装着者の動作を安定的且つスムーズに支援することを課題とする。
【解決手段】装着型入力装置100は、装着者12の眼球の動作方向に応じた外眼筋生体信号を検出する外眼筋生体信号検出手段140と、装着者12の頭部の動作方向を検出する頭部動作検出手段150と、装着者12の体幹位置を検出する体幹位置検出手段120と、外眼筋検出信号に基づいて眼球の動作方向を判別する視線方向判別手段170と、頭部動作検出手段150により得られた頭部検出信号と体幹位置検出手段120により得られた体幹位置検出信号との差に基づいて頭部の向きを判別する頭部動作方向判別手段180と、視線方向判別手段170の判別結果による視線方向と頭部動作方向判別手段180の判別結果による頭部動作方向とが一致した場合に当該装着者12が当該方向に移動するものと推定する動作方向推定手段190と、推定結果を人支援装置に入力する入力手段200とを有する。
(もっと読む)
外用胸部装着具
【課題】乳がん等の原因により乳房の全部または一部を手術により除去した人の乳房形状を形成あるいは補正して乳房手術部位を保護するとともに、外出時、室内でのリラックス時、就寝時等の状況に応じて胸部の重量を調節することができる外用胸部装着具を提供すること。
【解決手段】外用胸部装着具1は、乳房手術部位にあてがって装着される装着具であって、前記装着具は、胸部重量調整のための装着具本体と、前記装着具本体を被覆する被覆体とからなり、前記被覆体は、前記装着具本体を交換自在に収納してなるものである。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
マルチステージ係合アセンブリ及び関連方法
【課題】多重のラッチ止め、錠止及びまたは保持を提供する2つあるいはそれ以上のラッチ止め、錠止または保持ポイントを各備えるマルチステージ的なラッチ止め、錠止、または保持機構のアセンブリを提供することである。
【解決手段】第1コンポーネント22及び第2コンポーネント24がラッチ止めまたは錠止結合される状態下に、第1傾斜コイルバネ26は第1コンポーネント22と第2コンポーネント24との間に位置付けた少なくとも1つの共通溝に係入する。第1コンポーネント22及び第2コンポーネント24が保持連結される状態下に、第1傾斜コイルバネ26は第1コンポーネント22または第2コンポーネント24の何れかに位置付けた少なくとも1つの溝に係入する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の歩行支援に際して装着者に与える違和感を低減する。
【解決手段】本実施の形態では、歩容が変化する場合の一例として、装着型ロボット1の装着者がエスカレータ300に乗る場合を考える。装着者は、エスカレータ300に乗ると、踏板上に立つか、歩くかして歩容が変化するが、エスカレータ300を降りた後は、乗る前と同様の歩き方をすると考えられる。そこで、装着型ロボット1は、エスカレータ300に乗る前に装着者の歩行を支援しつつ、歩行情報を検出してアーカイブに記憶しておき、装着者がエスカレータ300から降りて再び歩き始める際に当該歩行情報を用いて歩行支援を行う。装着型ロボット1は、この制御方法により、装着者がエスカレータ300を降りて歩く際の歩容を推定して先回りして制御するため、装着者に与える違和感を低減することができる。
(もっと読む)
21 - 40 / 270
[ Back to top ]