
Fターム[4C097TB03]の内容
補綴 (46,288) | 義肢の動作;調節;操作 (438) | 調節機構 (94)
Fターム[4C097TB03]の下位に属するFターム
折曲げ解除;施錠 (55)
Fターム[4C097TB03]に分類される特許
1 - 20 / 39
電動義手

【課題】作動音を低減して静粛性を高めつつ、軽量化を図ることのできる電動義手を提供する。
【解決手段】義手本体10に支持された第1指部35及び第2指部42を回動させる駆動源として、高分子材料により形成され、電圧印加に応じて弾性変形し、電圧印加の停止に応じて元の形状に復元することにより直線往復運動する高分子アクチュエータ50を用いる。上記直線往復運動を回動運動に変換して各指部35,42に伝達する動力伝達部60を設ける。高分子アクチュエータ50から動力伝達部60を経て両指部35,42に至る動力伝達経路に、両指部35,42を含む複数のレバーを有するリンク機構70を設ける。これらのレバーの少なくとも1つを、支点、力点及び作用点を有するてことして機能させる。そして、力点を通じてレバーに入力される変位量を増幅して、作用点から出力させる。
(もっと読む)
電動義手

【課題】簡単な構成でより人間の手に近い動きが得られる安価な電動義手を提供する。
【解決手段】 人指し指に該当する第一義指4と、中指に該当する第二義指5と、薬指に該当する第三義指6と、小指に該当する第四義指7と、親指に該当する第五義指8と、各義指を支持する基台2と、この基台2を支持する腕部とからなる。そして、基台2に義指を動かす複数のモータを取り付け、このモータに対応してモータの回転方向と起動とを操作する複数のスイッチを設けた。
(もっと読む)
人工股関節臼蓋術中支援治具
【課題】術前に準備したコンピュータ三次元形状モデルを使って、術中は簡単な構造の治具を用いて、臼蓋穴のリーミングや、臼蓋カップを設置する術中操作を容易に行えるようにする。
【解決手段】本発明による人工股関節臼蓋術中支援治具は、骨盤の臼蓋に複数箇所設定されている臼蓋指示点に位置決めされる臼蓋ピン40a乃至40cと臼蓋底の中心位置決めされる臼蓋底ピン42を下端部に保持し、上端部には軸線で交差する照準部32を有する照準シャフト22と、骨盤における所定の特徴点に下端部が位置決めされる特徴点指示軸24と、照準シャフト22と特徴点指示軸24を平行に保持するとともに、特徴点指示軸24の軸方向と直角な方向に特徴点指示軸24の位置を位置決めする位置決め腕26と、位置決め腕26に一端が揺動自在に連結され骨盤における所定の特徴点に他端が固定される支持シャフト28と、から構成される。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者が体感する負荷の変動を小さくした歩行支援をする。
【解決手段】歩行支援装置において、装着者Mの疲労度を推定し、推定した疲労度をアシスト量を決定するパラメータとして使用することで、疲労度を考慮した可変アシスト制御を行う。具体的には、脚部を繋ぐリンク(連結部)に、大腿部、脹脛部、足部の各部を拘束部材で拘束し、各拘束部材に歪ゲージを取り付け、歪ゲージの出力から各部の拘束力を測定する。この測定した拘束力が大きくなると、対応する各部がむくんでいると考えられ、装着者の疲労度が増加していると推定される。そこで、推定した疲労度の増加に対応して、アシスト量を通常の設定(アシスト量)よりも大きくする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
筋力補助装置
【課題】従来の装置よりも大きな補助力をユーザに与えることができる筋力補助装置を提供する。
【解決手段】筋力補助装置100は、腰ハーネス20、背ハーネス10、ガイドプーリ16、及び、ワイヤを巻き上げるための巻き上げ器22を有している。腰ハーネス20は、ユーザの腰に装着される。巻き上げ器22は、腰ハーネス20に取り付けられている。背ハーネス10は、ユーザの背に装着される。ガイドプーリ16は、背ハーネス10に支持されており、ユーザの背中後方に配置される。巻き上げ器22から伸びているワイヤWが、ガイドプーリ16を介してユーザの背の上部に相当する位置で背ハーネス10に固定されている。ガイドプーリ16によって背の上部を後方から引っ張るようにワイヤWを配索するので、背屈方向に大きなモーメントをユーザに与えることができる。
(もっと読む)
上肢運動モデル
【課題】応答性能を向上させることができ、比較的急速な運動であっても良好な再現性が得られ、上肢の動作特性を十分に表現することができる上肢運動モデルを提供する。
【解決手段】所定の回転軸を中心に回転する目標指針に、該目標指針と同軸回転するリンクを追従させる位置決め操作にともなう人間の上肢の動作をモデル化した上肢運動モデルであって、目・脳モデル化部13と、上肢モデル化部14と、インターフェイスモデル化部12とを備え、目・脳モデル化部13に誤差補償感度係数βにより調整されるフィードフォワード項を有し、上肢モデル化部14に力覚フィードバック結合特性α(s)によるフィードバック項を有することで、視覚・力覚混合型フィードバックモデルとして構成される。
(もっと読む)
装着型動作支援装置
【課題】簡素な構成でありながら、三節部位を自然な屈曲姿勢とすることができ、装着者の骨関節に負担をかけることがなく、小型で、装着性が良好で、信頼性を向上させることができるようにする。
【解決手段】単関節駆動部は、単一の関節軸を支持し、ベース部に固定された関節軸支持部と、関節軸を中心に回転可能な駆動アーム部と、駆動アーム部に取り付けられるとともに、三節部位に装着される装着部とを備え、装着部は、三節部位の先端節に装着され、関節軸の位置は、駆動アーム部が目標到達位置にあるときに三節部位の2つの関節が屈曲し、かつ、装着部から関節部までの距離が、駆動アーム部が目標到達位置にあるときと、動作開始位置にあるときとで等しくなるように設定される。
(もっと読む)
低侵襲外科システムにおいて手の存在を検出するための方法およびシステム
低侵襲手術システムにおいて、ハンド追跡システムは、ヒトの手の一部に装着されたセンサ素子のロケーションを追跡する。システム制御パラメータは、ヒトの手の一部のロケーションに基づいて生成される。低侵襲手術システムの操作は、システム制御パラメータを使用して制御される。したがって、本低侵襲手術システムは、ハンド追跡システムを含む。ハンド追跡システムは、ヒトの手の一部のロケーションを追跡する。ハンド追跡システムに連結されたコントローラは、該ロケーションをシステム制御パラメータに変換し、システム制御パラメータに基づいて、コマンドを低侵襲手術システムに投入する。  (もっと読む)
(もっと読む)
関節用能動装具
【課題】変形性膝関節症の患者である装着者に廃用、装着感、血行障害を生じさせずに痛みを伴うことなく、筋力の増強につながる運動が行える装具を提供する。
【解決手段】膝の外側部にあてがわれるセンサ部2を引っ張る第1アクチュエータ部9〜12を備え、第1アクチュエータ部9〜12で生成される各分力fxを合成した力で膝の外側部を内側に押圧するようにした。また、膝関節にかかる荷重のうち左右方向の分力を荷重分力として検出するセンサ部2を備え、このセンサ部2より検出された荷重分力と同じ大きさの抗力を第1アクチュエータ部9〜12で発生させるようにした。
(もっと読む)
作動筋−拮抗筋作用を有する動力付き人工膝
人工膝は、並列をなす2つの直列弾性アクチュエーターからなる作動筋−拮抗筋配列を備え、膝関節、該膝関節に接続されて脚部材と並列をなす屈曲用及び伸展用アクチュエーター、及び、該アクチュエーターに独立にエネルギーを供給して、該膝関節及び該脚部材の動きを制御するためのコントローラを含んでいる。屈曲用アクチュエーターは、屈曲用モーターと屈曲用弾性要素の直列結合を含み、伸展用アクチュエーターは、伸展用モーターと伸展用弾性要素の直列結合を含む。センサーは、コントローラにフィードバックを提供する。屈曲用アクチュエーター及び伸展用アクチュエーターを一方向性とすることができ、この場合、屈曲用弾性要素及び伸展用弾性要素は直列ばねである。代わりに、伸展用アクチュエーターを双方向性とすることができ、この場合、伸展用弾性要素は一組の予め圧縮された直列ばねである。代替的には、屈曲用弾性要素を非線形漸軟ばねとし、伸展用弾性要素を非線形漸硬ばねとすることができる。 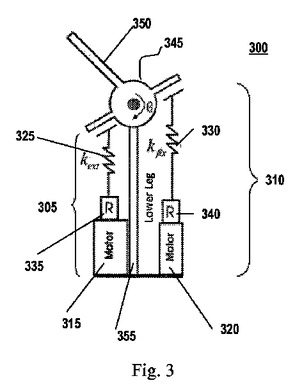 (もっと読む)
(もっと読む)
歩行能力についての評価方法および評価装置
【課題】少ない歩数においても歩行能力を客観的に評価することができる技術の提供。
【解決手段】マイクロコンピュータによって歩行周期を多段階に分割し、グループ化することを前提とする。義足装着者が歩行訓練をするとき、訓練が進むにつれて、時系列的に取得する歩行周期がグループを超えて変化する傾向が大である。そこで、そのような歩行周期の変化、すなわち、グループあるいはブロックの移動回数や頻度の大きさを歩行能力のための評価指標とすることができる。マイクロコンピュータ機能をもつインテリジェント義足などでは、義足自体が備えるマイコン回路およびセンサ手段などを活用して評価を行うことができる。
(もっと読む)
義肢用アクチュエータ
【課題】複数組のねじれ紐アクチュエータを空間的に効率よく配置し、組立の作業性、外観等に優れたコンパクトな義肢用アクチュエータを提供する。
【解決手段】義肢の腕部又は脚部に沿って湾曲した厚板状のケース80の周方向に沿って複数のねじれ紐アクチュエータが配列され、それぞれのねじれ紐アクチュエータを構成する駆動機構部20、ねじれ紐1及びスライド部材32がケース80内に収容されている。ケース80は、義肢の腕部又は脚部に沿って湾曲した厚板状部材81と、その外周面を覆う薄板状のカバー部材82とからなり、厚板状部材81の外周面側に駆動機構部20、ねじれ紐1及びスライド部材32が収容される凹部811、812が形成されている。
(もっと読む)
筋力補助装置
【課題】駆動機構を簡略化し、かつ関節のずれを許容できる筋力補助装置を提供すること。
【解決手段】本発明の筋力補助装置は、関節の一方の骨に沿って配置される第1の装着具10と、関節の他方の骨に沿って配置される第2の装着具20と、第1の装着具10に対して第2の装着具20を変位させる関節部材40を備え、使用者の動作を支援し、第1の装着具10を、関節部材40を連結する第1の外装具11と、第1の外装具11よりも人体側に配置される第1の内装具12とで構成し、第2の装着具20を、関節部材40を連結する第2の外装具21と、第2の外装具21よりも人体側に配置される第2の内装具22とで構成し、第1の外装具11と第1の内装具12との間、及び第2の外装具21と第2の内装具22との間に、それぞれ変位部材13、23を設けたことを特徴とする。
(もっと読む)
義足
【課題】本発明は、従来にない作用効果を達成する画期的な義足を提供することを目的とする。
【解決手段】身体に装着される上側構造部1と、この上側構造部1に連結され下端部に接地部2aを有する下側構造部2とからなる義足であって、前記下側構造部2若しくは前記上側構造部1のいずれか一方に突状部3が設けられ、他方に被嵌連結部6が設けられ、この被嵌連結部6にはリング部材5が嵌合されており、前記突状部3は前記リング部材5のリング孔5a内に配されるように構成され、前記リング部材5には前記リング孔5a内に突出する挟持部材4が設けられ、この挟持部材4により前記リング孔5a内の前記突状部3を挟持する構成であり、前記被嵌連結部6により前記挟持部材4の基端部4bを支承して前記挟持部材4を所定位置に保持するものである。
(もっと読む)
関節屈伸動作補助装置および関節屈伸動作補助方法
【課題】関節屈伸動作補助装置を装着してアクチュエータの非駆動状態から関節屈伸動作を開始しようとするときに装着者への負担を軽減する。
【解決手段】関節屈伸動作補助装置は、指20の近位指節間関節11の周辺に装着される装着具1と、近位指節間関節11の屈曲角を検出する角度センサ22と、接着部3を介して装着具1に設置されて、角度センサの出力に応じて近位指節間関節11に屈伸力を与えるアクチュエータ2と、を有する。アクチュエータ2が屈伸動作をしない状態で、角度センサ22で検出可能な所定の角度まで近位指節間関節11を曲げることができるように、アクチュエータ2と装着部3との間に遊びを設ける。
(もっと読む)
動作補助装置
【課題】使用者の身体の屈曲や伸展、ねじれ、収縮や伸長等の動作、およびより複雑な動作を補助することが可能な動作補助装置を提供する。
【解決手段】動作補助装置1は、複数の剛体部材4と、剛体部材4同士の端点E間を結ぶ複数のテンション材5とを組み合わせて構成され、複数のテンション材5の全部または一部が収縮制御可能な部材で構成された本体部2を備え、本体部2は、複数の剛体部材4のうちの一定数の剛体部材4が組み合わされて形成された層Lを1本の軸C方向に積み重ねて構成され、かつ、層Lには一定数の剛体部材4が組み合わされて軸Cの周囲に内部空間Sが形成されている。
(もっと読む)
装着式動作補助装置及びその制御方法及びプログラム
【課題】本発明は装着者に装着される動作補助装着具をスムーズに動作させることを課題とする。
【解決手段】装着者20が右足を動作させようとすると、ソケット部60に設けられた生体電位センサ110は右足大腿部22の皮膚表面から生体電位を検出する。随意的制御手段212は、制御信号d1を生成し、駆動電流生成手段220は、制御信号d1に基づいてモータ駆動電流eを生成して動作補助装着具30のモータユニット90に出力する。義足80の歩行動作に伴って各物理量センサで検出されたセンサ信号fが感覚フィードバック信号生成手段230に入力されると、感覚フィードバック信号gが感覚フィードバック信号変換手段140に出力される。そして、装着者20は、感覚フィードバック信号変換手段140からの信号(振動、スピーカ音、視覚)を感覚的(皮膚接触感覚、聴覚、視覚など)に認知して義足80の動作状態を判別することが可能になる。
(もっと読む)
能動把持装具
【課題】手指麻痺者が装着する把持装具において、軽量でコンパクトな能動把持装具を提供する。
【解決手段】親指が固定される第1部材と、親指以外の他の指が固定される第2部材と、第1部材と前記第2部材を連結して互いに相対的に回動させる軸17と、第1部材又は第2部材のいずれか一方を掌部に固定される固定部6とし、いずれか他方を可動部5として可動部5を固定部6に対して開く方向に偏倚させる第1の弾性部材7と、第1の弾性部材7の偏倚力に抗して可動部5を固定部6に対して閉じる方向に可動させる、第1の弾性部材7の弾性定数よりも大きな弾性定数を有する第2の弾性部材8が接続された操作部材9とを有してなることを特徴とする。
(もっと読む)
ダンパー機能付回転型アクチュエータおよびそれを用いた動作補助装置
【課題】単純な構造で駆動軸のトルクを柔軟に従動軸へ伝達することができ、しかもそのダンパー効果が可変の回転型アクチュエータおよびそれを用いた動作補助装置を提供する。
【解決手段】駆動源により回転駆動される駆動軸と、駆動軸と一体に回転するポンプ羽根車と、駆動されるべき系への入力である従動軸と、従動軸と一体に回転するタービン羽根車と、ポンプ羽根車からタービン羽根車へ動力を伝達する流体、ポンプ羽根車およびタービン羽根車を収容するハウジングとを備え、ポンプ羽根車および/またはタービン羽根車が可変ピッチ機構を有することを特徴とするダンパー機能付回転型アクチュエータおよびそれを用いた動作補助装置。
(もっと読む)
1 - 20 / 39
[ Back to top ]