
Fターム[4F035CD18]の内容
噴霧制御装置 (2,732) | スプレーヘッドの噴霧時の運動、駆動制御 (320) | 位置の制御 (39)
Fターム[4F035CD18]に分類される特許
21 - 39 / 39
自走型洗浄・塗装方法及び自走型の洗浄・塗装機
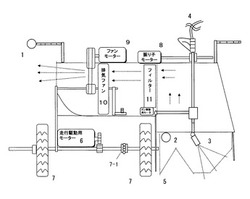
【課題】危険な人手を必要とする作業を省き、環境に悪影響を及ぼすことなく、品質の良い塗装を行う自走型洗浄・塗装方法及び自走型洗浄・塗装機を提供する。
【解決手段】位置を検知するセンサ1の情報に基づいて車両7の可動範囲を決め、車両の可動範囲内では、洗浄の状態を検知するセンサ2の情報に基づいて洗浄行い、車両7の可動範囲外の洗浄は、洗浄ガン3の位置及び角度を調節することにより洗浄を行い、洗浄水を飛散させることなく洗浄を行った後、位置を検知するセンサ1の情報に基づいて、車両7の可動範囲を決め、車両7の可動範囲内では、塗装面の状態を検知するセンサ2の情報に基づいて塗装を行い、車両7の可動範囲外の塗装は、塗装ガン3の位置及び角度を調節することにより塗装を行い、塗料を飛散させることなく塗装を行うことを特徴とする自走型洗浄・塗装方法及び自走型洗浄・塗装機。
(もっと読む)
物品上のプラズマ溶射皮膜多孔性を制御する方法及びシステム

【課題】ロボット溶射ガン組立体用の溶射被覆方法を提供する。
【解決手段】本溶射被覆方法は、被覆対象の物体(20)幾何学形状の離散化モデルをインポートする段階と、数値的に特性記述した溶射パターン(22)ファイルをインポートする段階と、複数の動作位置、滞留時間、及びロボット溶射ガンの溶射方向を定める配向を含むロボット動作ファイルをインポートする段階と、動作ファイル内の各動作位置を読み取る段階と、各動作位置において物体(20)幾何学形状のどの部分が通視可能であるかを判定する段階と、各動作位置についてのコア圧縮、ロボット溶射ガンの入射角、及び溶射の跳ね飛びに基づいて物体(20)幾何学形状の各通視可能部分において空隙容積率を算定する段階と、全動作ステップについて物体(20)幾何学形状の部分上の総皮膜厚さを計算する段階とを含む。
(もっと読む)
塗布装置、レーザ加工装置および塗布制御装置
【課題】溶剤を被加工物に対して効率良く迅速に塗布することが可能な塗布装置を得ること。
【解決手段】塗布装置1において、外部装置によって被加工物の表面上で第1の加工が行われる加工領域を含む所定領域を所定の加工ブロックで分割するとともに分割に用いた各加工ブロックの領域を示す加工ブロック情報を抽出する領域設定部12と、外部装置によって加工領域内で第2の加工が行われる加工位置を示す加工位置情報および加工ブロック情報に基づいて、加工領域を含む所定領域の分割に用いた各加工ブロックの中から加工位置を含む加工ブロックを塗布対象のブロックとして抽出する塗布位置設定部13と、塗布対象ブロック抽出部が抽出した塗布対象のブロックに塗布剤を塗布する塗布部15と、を備える。
(もっと読む)
光触媒噴射施工装置システム
【課題】従来、主な産業製品及び部品に対する光触媒施工は媒体本体に練り込むか、又は製品完成後に別途施工業者に依頼して手または加湿機状の装置で施工するのが主であったが両者も均一ロットまたは大量需要に対しての対応は可能であったがスポット受注の対応には時間と費用と大量の受注ロットが必要で、現状およびインク媒体素材に練りこむ製法は特性上最表面にて紫外線により反応する光触媒の作用自体も最大限に発揮する事が不可能であったが今回の装置を装着した産業製造機器を使用して媒体を製造する事により製品完成と同時に最表面に光触媒を噴霧できる事が可能となり多種多様な製造媒体ならびに小ロットの製造媒体にも光触媒を施工する事が可能となる。
【解決手段】 製造媒体の製造及び搬送ライン上に微粒化可能な光触媒噴射ノズルを可動式の取付装置を配した光触媒噴射ユニットを取付ける事により製品製造完了または製造過程において同一ライン上で光触媒の最表面施工を可能にする事ができる。
(もっと読む)
光触媒噴射施工装置付き印刷機
【課題】従来、紙媒体(印刷物等)に対する光触媒施工は紙本体に練り込むか、またはインク自体に練り込むかの手法が主であったが両者も均一ロット大量需要に対しての対応は可能であったがスポット受注の対応には時間と費用と大量の受注ロットが必要であった上紙およびインク自体に練りこむ関係上、最表面にて紫外線により反応する光触媒の作用自体も最大限に発揮することが不可能であったが今回の装置を装着した印刷機を使用して印刷することにより印刷完成と同時に最表面に光触媒を噴霧できることが可能となり多種多様な紙媒体等ならびに小ロットの印刷物にも光触媒を施工することが可能となる。
【解決手段】 印刷機の排紙部分に微粒化可能な光触媒噴射ノズルを可動式の取付装置を配した光触媒噴射ユニットを取付けることにより印刷完了と同時に光触媒の最表面施工を可能にすることができる。
(もっと読む)
スプレー装置
【課題】ダイカスト製品形状が幅広で凹凸が複雑な場合でも、金型鋳造面に離型剤を、最適位置に最適量塗布できて、製品品質の向上を図るとともに、生産性と信頼性の高いスプレー装置の提供をする。
【解決手段】噴霧量を電気的に可変制御可能な吐出ポンプ機能を備え、これと接続したスプレーノズル11を、幅方向を含めた3軸方向(X、Y、Z)と3回転軸方向(Θx、Θy、Θz)に位置移動制御および回転角度制御の可能なマニピュレータ14に保持し、少なくとも1方向には独立して自走・自転するアクチュエータ構造を設けたスプレーヘッド13と一体化することにより、予め複数設定しておいたプログラムを切り替え作動することによって、迅速に金型鋳造面6の所定の位置と向きに、所定の量の離型剤を適正に噴霧し、また、種々の異なる金型鋳造面にも簡単に適用することを可能とする。
(もっと読む)
非矩形状物体の漸次的噴射のための噴射システム
スプレーガン又はノズルの制御のためのシステム及び方法であって、移動する対象物体又は移動する対象物の一部の寸法に対応するようにスプレーガン液体放出パターンが動的に変えられるシステム及び方法。スプレーガンは、ファンエア、霧化エア、液体及びシリンダエアのための入力を含んでいる。例えばコンベアベルト上で近づいてくる対象物体の検出時に、対象物体又は対象物体の一部の形状に対応するスプレーパターンを与えるための所定の或いは同時形成された曲線にしたがってファンエア圧力、霧化エア圧力、液体圧力、シリンダエア圧力が変えられ、それにより、過剰噴射に起因する無駄及び非効率さが最小限に抑えられる。 (もっと読む)
基板の洗浄装置
【課題】 基板が撓んだ場合であっても、洗浄効果を低下させることなく基板を洗浄できる基板の洗浄装置を提供すること。
【解決手段】 基板5を下方から支えるとともに略水平方向に搬送する搬送ローラ12が装着される搬送ローラ軸11の垂直上方に、この基板5の搬送方向に略直角な水平軸回りに前記搬送ローラ12の回転に同期して回転するノズル管13を設け、このノズル管13に基板5の表面に洗浄液を噴射して該基板の表面を洗浄する噴射ノズル14を備える。
(もっと読む)
モジュール式自動スプレーガン・マニホールド
モジュール式自動スプレーガン・マニホールドが提供される。本マニホールドは、互いから横方向に間隔を空けられた関係で列状に配置された複数のスプレーガン・モジュールを備えている。接合要素が、本マニホールドの上流端に配置される。第1支持アセンブリが、接合要素とスプレーガン・モジュール・アレイの中の第1スプレーガン・モジュールとの間に配置され、接合要素に対して第1スプレーガン・モジュールを支持する。第1支持アセンブリ内の流体導管が、接続要素の流体供給接続部および加圧空気供給接続部と連通している。第2支持アセンブリが、隣接のスプレーガン・モジュール対の間に配置され、これらのモジュールを支持する。各第2支持アセンブリは複数の流体導管を備えている。1つ以上の保持要素が、スプレーガン・モジュール、支持アセンブリおよび接合板を組み立てられた関係で固定する。 (もっと読む)
基板載置装置
【課題】 ステージの移動とステージ上の基板を持ち上げる機構とを両立しながら、装置の耐久性向上およびコストを低下させる基板載置装置を提供する。
【解決手段】 本発明の基板載置装置2のステージ21は、基板をその上面に載置して移動する。ピン機構26は、ステージ21の上面に対して昇降可能に設けられ、ステージ21に載置された基板を持ち上げる。突き上げ板27および上下駆動部28は、ステージ21とは別体で固設され、ピン機構26と当接してステージ21の上面から突出させる。センサ271は、ピン機構26の位置を検出する。制御部は、センサ271の検出結果に基づいて、ステージ21が所定の位置に配置された際、上下駆動部28を駆動させてピン機構26を上昇させる。
(もっと読む)
表面塗布装置及び表面塗布方法
【課題】塗布した加工品の表面への塗料噴霧の再沈着及び塗料噴霧による汚染を抑えられる塗布装置及び方法の提供。
【解決手段】塗布装置1は加工品3の面に塗料を塗布する塗布ノズル2及び塗料蒸気及び/又は塗料噴霧を含んだ空気を吸引する吸引装置を有し、塗布ノズル2と加工品3は相対的に可動に構成している。塗布ノズル2の開口部9を覆うように配置した吸引ベル4を噴霧ノズル2のノズル壁14に強固に連結する。吸引ベル4は内部ベル5及び外部ベル6を含んで構成され、加工品3から僅かな間隔を隔てて配置されている。外部ベル6は内部ベル5を覆うように、互いに離れた状態を保って配置され、内部ベル5が噴霧室7を形成し、外部ベル6及び内部ベル5はその間に吸引口10を有する吸引室8を形成する。
(もっと読む)
ノズル作動装置
【課題】従来使用されていたエアシリンダや電動モータなどの駆動手段を使用せず、エア漏れや漏電などの心配が全くいらない、故障の少ない使い勝手の良好な指向方向切換え用のノズル作動装置を提供する。
【解決手段】流体を噴射するノズル2を被処理物に対向して往復移動するとともに指向方向を変更可能に構成したノズル作動装置において、前記ノズル2を揺動可能に支持する支持手段1と、一端を支持手段1に設けた掛止部9に、他端をノズル2に設けた掛止部10に架け渡した引張りバネ11と、前記支持手段1を所定の範囲で往復移動する駆動手段と、前記ノズル2の往復移動の範囲内に設けられ、該ノズル2に当接することにより指向方向を切換える当接部材12,13を設ける。
(もっと読む)
塗布ロボット
【課題】 待機時に塗布剤が固化するのを防止するために使用される溶剤の影響を排除することができる塗布ロボットを提供する。
【解決手段】 モータにより駆動されて塗布剤の瞬時吐出量を制御する塗布装置をロボット先端に取付け、その移動範囲内に塗布剤の固化を防止する溶剤貯留用の貯留槽7を配置して塗布装置5の塗布ノズル5bを貯留槽7内の溶剤内に位置させる一方、塗布ノズル5bが貯留槽7内の溶剤から離脱して塗布開始ポイントに達するまでに、塗布ノズル5bから一定時間あるいは一定量塗布剤を吐出するように構成されている。そのため、塗布作業を開始する時には、塗布ノズル5bの先端に充満した塗布剤に溶剤が染込み、塗布剤の粘度が低くなっていても、この塗布剤が所定位置あるいは空吹き受け槽8内で吐出されるので、その後は所定粘度の塗布剤が吐出され、塗布面を全面に亘って所定厚さに保つことができる。
(もっと読む)
産業用ロボットに使用されるドア開閉機構
ロボット塗装装置に使用されるドア開閉機構であって、この機構を使用してドア(7)の一部分(6)の位置を検出することにより、内部塗装のためにドアを開く、及び/又は閉じることができる。ドア開閉装置には、好適には垂直方向(Z)の磁界又は電磁界の磁界強度の変化を検出する少なくとも一つの非接触センサ部材(1)が配置される。また開閉装置には、衝突等を検出する複数のセンサを配置することができる。方法、システム、及びコンピュータプログラムも開示される。 (もっと読む)
画像を表面に塗布するための装置および方法
グラフィック画像を表面に塗布するためのシステム(30)および方法を開示する。一実施形態において、システムが、表面(34)に顔料インクの液滴パターンを向けるためのアプリケータ(32)と、アプリケータ(32)に連結され、表面(34)に対して少なくとも1つの横方向に、そしてまた表面(34)に対して垂直方向にアプリケータ(32)を移動させる動作装置(36)と、グラフィック画像に対応するデータを受信し、少なくとも動作装置(36)の運動を制御して表面(34)にグラフィック画像を塗布するように構成される、動作装置(36)に連結されたコントローラ(38)とを含む。別の態様において、方法が、画像源から画像ファイルを受信することと、表面の幾何学的形状を説明する表面モデルを生成することとを含む。ついで、アプリケータ(32)が表面モデルにしたがって制御され、画像ファイルに対応するグラフィック画像が塗布される。  (もっと読む)
(もっと読む)
トンネル内壁面の塗装装置
【課題】トンネル内壁面に対して容易且つ速やかに塗装可能な塗装装置を、簡易な構造で安価に提供する。
【解決手段】トンネル内を移動し乍ら、当該トンネルの内壁面に対して塗料を吹き付けることによって塗装を行うトンネル塗装装置100であって、塗料を貯蔵するタンク部10と、当該タンク部10から塗料を吸引して噴射口30によって前記塗料を高圧噴射する吹付け機20とを有し、前記噴射口30は、断面略弧状のトンネル内壁面と対面可能に配置すべく、当該塗装装置上に立設した台座部40に設けてなる塗装装置100である。
(もっと読む)
液状物質塗布機の昇降装置
被塗布体と吹付けアセンブリーとの距離を調節可能な液状物質塗布機の昇降装置が開示される。昇降装置は、所定の本数が立設され、その外周面には螺旋状ネジ山が形成されると共に、駆動モーターにより選択的に回転する回転軸と、被塗布体が載置される移送テーブルを支持するように前記回転軸に配設され、内面には前記螺旋状ネジ山と嵌合する螺旋状ネジ山が形成されると共に、前記回転軸が回転することにより前記移送テーブルを昇降させる昇降部材と、を備える。 (もっと読む)
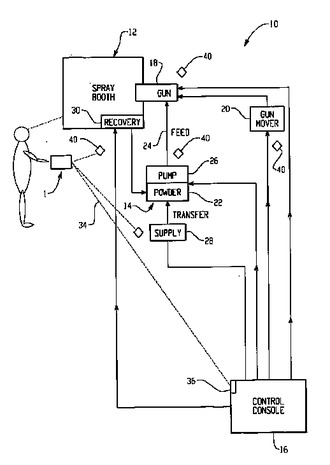
材料塗布システムのワイヤレスオペレータインタフェース
オペレータインタフェースが、アクセス装置を介して、それぞれ動作場所での1つ又は複数の動作機能のIDをオペレータに提供する。アクセス装置は動作機能とのワイヤレス接続を有することができ、識別された機能に固有のメニューを提示する。アクセス装置はオプションで、データ、制御機能、配合表、メニュー等をオペレータに提供する。このようにして、オペレータは異なる動作場所にて動作機能の局所制御を行うことができ、それによって動作場所間を移動することでの時間の損失及びエネルギーが低減する。
 (もっと読む)
(もっと読む)
懸吊式ワーク搬送装置
【課題】スペースの有効利用が図れるばかりでなく、エアシリンダや制御モーター、電子機器等のコストの嵩む機器の使用を削減し、シーケンス作業工程の自動化を経済的に行なうことができる懸吊式ワーク搬送装置を提供する。
【解決手段】 ハンガー2にキャッチングアーム53を設け、該アーム53を閉鎖方向に付勢するバネ55と、キャッチングアーム53を開放するキャッチングアーム開閉装置56を備える。ハンガー2には、これを横方向に回動する横方向回転ギア52と横方向転換装置51を設け、アーム53には、キャッチングハンド59を縦方向に回動する縦方向回転ギア61と縦方向転換装置60を設ける。ライン側には、アーム開閉装置56を作動する開閉ガイド58と、横方向回転ギア52を駆動するチェーン13と、横方向転換装置51を作動するガイド36、36と、縦方向回転ギア61を駆動するチェーン63と、縦方向転換装置60を作動する転換ガイド62を設ける。
(もっと読む)
21 - 39 / 39
[ Back to top ]