
Fターム[5B050BA09]の内容
Fターム[5B050BA09]に分類される特許
301 - 320 / 2,396
シミュレーション装置の画像データ生成装置
【課題】設計時間を長くすることなく、納品先の工場と類似する環境をシミュレーション装置に再現可能にする。
【解決手段】本発明のシミュレーション装置の画像データ生成装置は、現実の工場においてカメラで撮影して得られた複数の2次元撮影画像を、その撮影角度データと共にシミュレーション装置に入力する手段と、検査対象のワークの3次元データを入力する手段と、複数の2次元撮影画像の中から、検査カメラの撮影角度と一致する撮影角度データを有する2次元撮影画像を選択して背景画像とする手段と、検査カメラの光軸に対して背景画像の平面が直交するように設定する手段と、背景画像上にワークを重ねて配置したものを検査カメラにより撮影して得られる画像を計算により求め、この求めた画像を検査カメラ画像として出力する手段とを備えている。
(もっと読む)
多視点画像合成方法及び多視点画像合成システム

【課題】アーチファクトが少ない多視点画像合成技術を提供する。
【解決手段】複数の視点に設置したカメラにより取得した基準画像中の形状情報を取得し、取得した形状情報を、信頼性推論ブロック1101において、基準画像を構成する各ピクセル位置に対応する形状情報に変換し、基準画像を構成する各ピクセルの重みを信頼性情報1113として生成する。 ビュー合成ブロック1102では、カメラにより取得した基準画像、信頼性ブロック1101において得られた形状情報と信頼性情報1113に基づき、ユーザインターフェースブロック1103から入力される仮想カメラ情報1112(仮想視点の位置と方向)に基づき、仮想視点の位置と方向から観た多視点画像を合成する。
(もっと読む)
情報表示システム、情報表示装置、情報提供装置、および、プログラム
【課題】ARを用いたサービスの利便性を向上させる。
【解決手段】ステレオカメラを備えた情報表示装置では、撮像画像から3Dモデリングデータを生成する。情報表示装置は、撮像画像から被写体を照合するための照合画像もしくは照合画像に相当する3Dモデリングデータを外部装置から取得する。情報表示装置は、生成した3Dモデリングデータと取得した照合画像のそれぞれで、SIFTやSURFなどによって、特徴点の抽出や特徴量の算出をおこない、これらの特徴情報に基づいて、3Dモデリングデータの視線方向を、照合画像もしくは照合画像に相当する3Dモデリングデータの視線方向に変更する。視線方向を変更した3Dモデリングデータと照合画像もしくは照合画像に相当する3Dモデリングデータとで被写体の照合をおこない、照合された被写体に付加情報を重畳表示する。
(もっと読む)
三次元画像処理方法および三次元画像処理装置
【課題】三次元画像において、視差が無い部分の左右の画像信号の食い違いを抑制し、違和感の少ない三次元画像を提供する。
【解決手段】左眼用画像と右眼用画像の一方を基準画像、他方を参照画像とし、基準画像を分割したブロックごとに参照画像との視差評価を検出し、視差評価が所定の条件を満たすブロックを、視差無し部分と判定する視差検出・判定部22と、視差無し部分に属する対応する左眼用画像の画素値と右眼用画像の画素値を近づけるように補正する補正部23と、を有する三次元画像処理装置。
(もっと読む)
共有オンライン環境におけるカスタマイズされた体験用のシステム及び方法
【課題】共有オンライン環境内で、カスタマイズされた体験を提供するシステム及び方法を提供する。
【解決手段】複数のクライアント・ステーションがアクセスするための共有環境のホストとなるオンラインサーバーと、クライアント・ステーションのクライアントプロセッサが実行するオンライン・クライアントアプリケーションとを用意する。サーバープロセッサは、クライアントに関するクライアントデータをアカウント・データベースから検索し、クライアントデータに基づいてクライアントの嗜好を特定し、クライアントの嗜好に応じて、共有環境からカスタマイズされた環境を生成し、そしてカスタマイズされた環境を、クライアントに関連するクライアント・ステーションのオンライン・クライアントアプリケーションに送信して、カスタマイズされた環境をクライアントのディスプレイ上にレンダリングするように構成されている。
(もっと読む)
仮想視点画像合成方法及び仮想視点画像合成システム
【課題】アップサンプリングされた深度マップに遮断作用又は平滑作用を及ぼさないアップサンプリング方法を低いビットレートで実現する仮想画像合成技術を提供する。
【解決手段】多視点撮影サブシステム101にて、複数の視点に設置したカメラから、多視点ビデオ画像105を取得し、形状生成サブシステム102にて、形状情報106を生成するとともに、深度カメラ402で多視点ビデオ画像105よりも低解像度の深度マップ413を取得する。アップサンプリングサブシステム401にて、多視点ビデオ画像105及び深度マップ413に基づき深度マップ413をアップサンプリングする。仮想ビュー合成サブシステム104にて、多視点ビデオ画像105、アップサンプリングした深度マップ及び、画像を合成する際の視点となる仮想視点の位置情報と方向情報に基づいて、仮想視点情報に対応する仮想視点画像を合成することにより、仮想視点画像を合成する。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】簡易な信号処理により立体視可能な画像信号を生成し、かつ過度な高域強調を低減する。
【解決手段】入力画像信号の空間的な特徴量を抽出し、入力画像信号に対して特徴量を適用した異なる強調処理を施すことで左眼用画像と右眼用画像を生成する。具体的には、入力画像信号に対する輝度微分信号、あるいは輝度微分信号の非線形変換信号を入力画像信号に対して加算/減算した信号を左眼用画像と右眼用画像の信号とする。さらに入力画像信号あるいは生成した左/右眼用画像信号に対する低域通過フィルタによるフィルタリング処理を行う。本構成により、簡易な信号処理で、立体視の可能な画像の生成が可能となり、特徴量として生成される微分信号に基づく過度な高域強調が低減された自然な画像を生成できる。
(もっと読む)
画像処理装置、表示装置、画像処理方法及びプログラム
【課題】各フレームのコントラスト調整時にフレーム間の相関を推定する。
【解決手段】3次元の動画像のMフレーム目の画像の奥行き情報を抽出する奥行き情報抽出部13と、Mフレーム目の画像の輝度成分を抽出する輝度抽出部12と、Mフレーム目の画像の輝度成分に基づいてMフレーム目のコントラスト成分を抽出するコントラスト抽出部15と、Mフレーム目のコントラスト成分及び奥行き情報に基づいて、Mフレーム目の画像のコントラスト調整用ゲインマップCGを算出するゲイン生成部16と、(N−1)フレーム目及びNフレーム目(N>0)を含む少なくとも2フレーム間の画像の相関値を算出する相関推定部20とを備えた画像処理装置10であって、ゲイン生成部16は、Mフレーム目の画像のコントラスト調整用ゲインマップCGと前記相関値とからNフレーム目のコントラスト調整用ゲインマップEGを推定する。
(もっと読む)
三次元地図自動生成装置
【課題】 カメラで撮影した映像を解析して三次元情報を抽出し、画像処理技術により三次元地図を自動生成する。
【解決手段】 車両等に積載されたカメラにより対象物と背景の動画像を取得する動画像取得装置1と、動画像の背景と対象物に固定された静止座標系に対するカメラの三次元位置及び三軸回転姿勢を示すCV値を求めて動画像の各フレームと対応させたCV映像を生成するCV映像生成装置2と、CV映像から画像フレームを取り出し画像中の対象物及び背景を複数の領域分割画像に分割する領域分割装置3と、領域分割画像に対応するCV映像のフレーム内小領域中の複数の特徴点の三次元座標を求めるフレーム内小領域特徴点三次元化装置4と、複数の特徴点の三次元座標からフレーム内小領域の面を抽出して複数のポリゴンを自動生成する複数領域ポリゴン化装置5を備える。
(もっと読む)
3Dデータ解析装置および3Dデータ解析方法ならびに3Dデータ解析プログラム
【課題】多数のヒストグラムあるいはサイトグラムを参照したり、三次元分布図を想起したりすることなく、解析対象とする微小粒子ならびに微小粒子小集団を分布図上で容易かつ直感的に特定できるデータ解析装置の提供。
【解決手段】微小粒子の測定データを保存するデータ格納部130と、前記測定データから独立した4種の変数を選択する入力部141と、選択された変数のうち3種の変数を座標軸とする座標空間内における位置計算し、かつ、選択された変数のうち残りの1種の変数から図形を計算して、前記微小粒子の特性分布を表す3D立体画像を作成するデータ処理部120と、前記3D立体画像を表示する表示部142と、を有する3Dデータ解析装置1を提供する。
(もっと読む)
立体画像データ送信装置、立体画像データ送信方法および立体画像データ受信装置
【課題】立体画像表示の際の重畳情報、例えばOSD等のグラフィクス情報の表示において、画像内の各物体との間の遠近感の整合性の維持を容易に図る。
【解決手段】奥行き情報セット作成部122は、ディスパリティ・マップに基づいて、立体画像データに対応した奥行き情報セットを作成する。奥行き情報セットは、画像表示面の分割情報と各分割領域の奥行き情報を含む。奥行き情報は、例えば、モニタポジションに対して立体画像面が手前にあるか否かを示す画像面情報、さらには、この画像面情報および視差情報とされる。奥行き情報セットには、視差情報の存在を示すフラグ情報が挿入される。奥行き情報セットを、立体画像データのデータストリームを有する多重化データストリームのPMTやEIT等の配下に挿入されるデスクリプタに含めて送信する。
(もっと読む)
画像処理プログラム、画像処理装置、画像処理システム、および画像処理方法
【課題】実世界画像を用いて仮想オブジェクトに対して新たな処理を行うことができる画像処理プログラム、画像処理装置、画像処理システム、および画像処理方法を提供する。
【解決手段】所定色が設定されている少なくとも1つの仮想オブジェクトが仮想世界に配置され、実カメラによって撮像された撮像画像において、所定色に相当する少なくとも1つの画素が含まれているか否かを、撮像画像の画素が有するRGB値、色相、彩度、および明度からなる群から選ばれた少なくとも1つを含む色情報を用いて検出する。所定色に相当する画素を検出した場合、当該所定色が設定されている仮想オブジェクトに対して所定の処理を行い、仮想オブジェクトが少なくとも配置された仮想世界の画像を表示装置に表示する。
(もっと読む)
画像処理装置、画像表示システムおよび画像処理プログラム
【課題】合成する画像と重複する背景の画像の視認性を向上させる。
【解決手段】画像出力部2は、第1の3次元物体の一部が除去されることによってこの3次元物体が複数の部位に分割された第2の3次元物体の表面形状を示す画像を出力する。画像合成部3は、画像出力部2から出力された画像を半透明状態で背景画像に合成する。画像合成部3から出力される合成画像では、第2の3次元物体の描画領域のうち第1の3次元物体から除去された領域において、背景画像に存在する物体が直接的に視認できるようになる。
(もっと読む)
抽象化プログラム、情報処理装置および抽象化方法
【課題】全体と特徴との双方を確認することが可能な図形を得ること。
【解決手段】抽象化プログラムは、図形の抽象化を行う抽象化プログラムある。かかる抽象化プログラムは、図形の特徴点を抽出し、図形が抽象化される座標系における座標軸方向に特徴点で図形を含む領域を分割する処理を情報処理装置10に実行させる。また、抽象化プログラムは、分割した抽象化前の領域の数、および特徴点の間隔に基づき、抽象化後の領域の大きさを算出する処理を情報処理装置10に実行させる。また、抽象化プログラムは、抽象化後の領域の大きさに基づき、抽象化後の領域を図形に割り当て、図形を抽象化後の領域に合わせてサイズを変更する処理を情報処理装置10に実行させる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】生成される3D画像の品質を劣化させることなく、処理量の小さい2D3D変換を実行可能な画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置10aは、定点設定部12と、サンプリング点設定部14と、視差画像生成部16と、を備える。定点設定部12は、複数の第1画素を含む第1画像データから、所定のサンプリング分解能に基づいて生成したサンプリング座標空間に複数の任意の定点を設定する。サンプリング点設定部14は、サンプリング座標空間の任意の座標に対象点を設定し、対象点の画素成分に基づいて算出したサンプリング座標に対象点に対応するサンプリング点を設定する。視差画像生成部16は、サンプリング座標に配置すべき第2画素の画素値を算出して、複数の第2画素を含む第2画像データを複数個生成する。
(もっと読む)
製造ラインの検討システム
【課題】製造ラインの構築に際して、製造設備等の三次元データの整備に係る労力を軽減させつつ、検討精度を向上させて、手戻りの発生を抑制することができる製造ラインの検討システムを提供する。
【解決手段】検討システム1は、車両データベース2と、製造設備データベース3と、工程データベース4と、車両10、部品11、製造設備12および工程スペース14のうち、検討作業を行う作業者の目前に実物が存在しないものについて、車両データベース2、製造設備データベース3および工程データベース4に基づいて、仮想の各三次元映像(バーチャル映像)を生成する仮想映像生成手段たる演算装置5と、作業者の目前に、演算装置5により生成したバーチャル映像を、車両10、部品11、製造設備12および工程スペース14のうち、作業者の目前に実物が存在するもののリアル映像と、位置合せしつつ表示する映像表示部7と、を備える。
(もっと読む)
姿勢推定装置および姿勢推定プログラム
【課題】人物の撮影画像から姿勢または動きを推定する際に対応するCG画像との照合の精度を高める。
【解決手段】姿勢推定装置1は、撮影画像と、当該撮影画像中の人物に対応して生成されたCG画像とを入力し、撮影画像からオブジェクトの特定領域を2値化したシルエットを抽出すると共に、CG画像から同様に特定領域を2値化したシルエットを抽出する特定領域抽出手段31と、抽出されたそれぞれのシルエットに細線化処理を施す細線化手段32と、細線化されたそれぞれのシルエットに膨張処理を施す膨張処理手段33と、膨張させたそれぞれのシルエットに距離変換を施すことで濃淡画像を生成する距離変換手段34と、それぞれの濃淡画像の特徴量としてHOGを算出する勾配特徴量抽出手段35と、撮影画像から算出されたHOGとCG画像から算出されたHOGとを照合することで、撮影画像中のオブジェクトの関節角度を推定する照合手段4とを備える。
(もっと読む)
合成画像出力装置および合成画像出力処理プログラム
【課題】動画撮影された人物画像を他のキャラクタ画像に置き換えた合成画像を生成して出力するための合成画像出力装置において、所定の人物の意志に従って、人物の顔部分はそのままにして変身させた変身合成画像を容易に生成すること。
【解決手段】動画撮影された一連の撮影画像Gが入力されると、予め顔画像で役割登録された人物画像(J)が抽出され、当該人物画像の顔部分をそのままにして、その人物画像のモーションに応じた各役割の変身画像24Gu1′に置き換えられた合成画像GGが生成される。
(もっと読む)
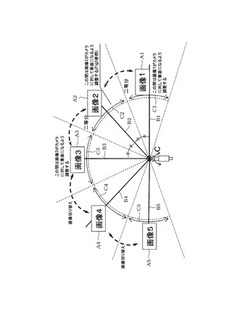
異なる詳細度を持つ同一地物の外観表示用画像の生成方法及びその装置
【課題】異なる詳細度を持つ同一地物の外観表示用画像の生成を効率的に行う。
【解決手段】一つの対象地物のうち最も詳細度が高い外観表示用画像を持つ三次元モデルを仮想空間内に配置する第1の過程と、前記三次元モデルを撮影するように配置される仮想空間内のカメラを、当該三次元モデルを撮影するとき前記三次元モデルの詳細度が切り替わる直前の距離まで離し、当該地物の三次元モデルが収まる範囲の画角で前記三次元モデルの全周を複数N回に分けて撮影する第2の過程と、前記第2の過程で撮影した三次元モデルを撮影した時点の詳細度の外観表示用画像により前記N回レンダリングする第3の過程と、前の過程でレンダリングした画像を低い詳細度の三次元データのテクスチャとして用いる第4の過程とからなる。
(もっと読む)
立体映像処理装置および立体映像処理方法
【課題】入力映像からユーザの所望の注目オブジェクトを検出し、検出した注目オブジェクトと他のオブジェクトとの間の奥行き方向の位置関係に応じたエンハンサ処理を行う立体映像処理装置を提供する。
【解決手段】立体映像処理装置が、入力画像に含まれるオブジェクトを検出し、オブジェクトの視差量を算出する。立体映像処理装置が、オブジェクトの画像と予め登録された注目対象の画像との相関度に基づき、ユーザが注目する注目オブジェクトを決定する。立体映像処理装置が、注目オブジェクトの視差量と、他のオブジェクトの視差量とに基づき、注目オブジェクトと他のオブジェクトとの奥行き方向の位置関係を判断する。そして、立体映像処理装置が、上記奥行き方向の位置関係に基づき、エンハンサ処理のパラメータを生成し、このパラメータを用いて、入力画像に対してエンハンサ処理を実行する。
(もっと読む)
301 - 320 / 2,396
[ Back to top ]