
Fターム[5B050EA28]の内容
イメージ処理・作成 (84,044) | 画像処理 (22,430) | 3次元画像、図形の処理 (3,813) | 曲面、3次元形状記述、生成 (1,034)
Fターム[5B050EA28]に分類される特許
1 - 20 / 1,034
スケルトンモデルの姿勢制御方法,及びプログラム
サーバ装置およびプログラム
投影システム及び方法
電子機器及び三次元モデル生成支援方法
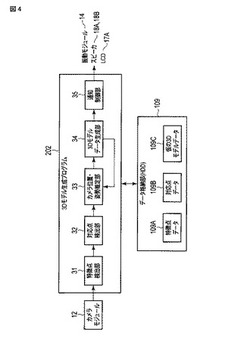
【課題】 三次元モデル生成のための画像を容易に取得できる電子機器及び三次元モデル作成支援方法を提供すること。
【解決手段】 実施形態によれば、電子機器は、三次元モデル生成手段、撮影位置推定手段及び通知制御手段を具備する。三次元モデル生成手段は、三次元モデルを生成する対象の物体を撮影した複数の画像を用いて、三次元モデルデータを生成する。撮影位置推定手段は、前記複数の画像の内の最後に撮影された画像の撮影位置を推定する。通知制御手段は、前記生成された三次元モデルデータと前記推定された撮影位置とに基づいて、ユーザに、前記物体を次に撮影する位置を通知する。前記三次元モデル生成手段は、前記物体を新たに撮影した画像をさらに用いて、前記三次元モデルデータを更新する。
(もっと読む)
複数の3D曲線からの表面の生成

【課題】複数の3D曲線から表面を生成するための、コンピュータによって実施される方
法が提供される。
【解決手段】方法は、複数の3D曲線を与えるステップ(S10)と、曲線の対の間のクロッシングを決定するステップ(S20)と、クロッシングを表すノード、および隣り合うクロッシングを表すノードの対を接続する弧を含む基底グラフを定義するステップ(S30)と、グラフから、3Dの位置によって定義される頂点、および頂点の対を接続するエッジを含むメッシュを決定するステップ(S40)と、メッシュに表面を当てはめるステップ(S50)とを含む。
そのような方法は、複数の3D曲線からの表面の生成をより容易にする。
(もっと読む)
パーツカタログ作成装置、パーツカタログ閲覧装置、プログラム、およびパーツカタログ作成方法
【課題】小さいパーツであっても見やすく表示させることができ、それでいてコンピュータの表示処理にかかる負荷を過大にしないようにする。
【解決手段】所定の視線ベクトルにより2次元画像を作成する際、リスト情報に含まれる部品全体のサイズに対する部品サイズのサイズ比が所定の大きさよりも小さいか否かを判断する。そして、サイズ判断により所定の大きさよりも小さいと判断された部品については当該部品を強調表示するパーツ強調画像をベクトル形式で作成する。また、サイズ判断により所定の大きさよりも小さいと判断されていない部品については当該部品を強調表示するパーツ強調画像をラスター形式で作成する。こうして作成された2次元画像をパーツカタログデータの一部に含めて出力する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】実環境中にマーカーを設置する等の事前処理を行うことなく、実環境を撮影した画像に適切な提示画像を調和させて提示する。
【解決手段】形状推定部31で、背景画像内の面を有する領域を推定し、提示領域選択部33で、形状推定部31で推定された面を有する領域であって、かつ領域内の各画素の画素値が単色または単色のグラデーションを示し、所定サイズ以上の領域を提示画像を重畳する領域として選択する。提示画像選択部36は、実環境情報取得部32で取得した本装置の位置、移動方向等の実環境情報、及びユーザ情報取得部34で取得したユーザの属性情報に基づいて、提示画像記憶部37に記憶された複数の提示画像から提示画像を選択する。表示制御部38で、提示領域選択部33により選択された領域に、提示画像選択部36により選択された提示画像が重畳されて提示されるように表示装置40を制御する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】立体画像データの表示切り替え時における視聴疲労を低減する。
【解決手段】グラフィックス生成部7は、第1の立体画像データに対応する位置まで移動していく画像データを生成する。表示パネル制御部29は、第1の立体画像データを表示させる前に、又は、第1の立体画像データを表示させながら、上記画像データを表示させる。
(もっと読む)
画像ワープ方法及びそのコンピュータプログラム製品
【課題】画像ワープ方法及びそのコンピュータプログラム製品を提供する。
【解決手段】この画像ワープ方法は、元の視線角に対応する元の画像の複数の元の特徴点を決定するステップと、該元の画像内の該複数の元の特徴点の元の画素座標を計算するステップと、該複数の元の特徴点にそれぞれ対応する該元の画像の複数の新しい特徴点を決定するステップと、該元の画像上に射影された該複数の新しい特徴点の新しい画素座標を計算するステップと、該元の画像内の該元の特徴点の該元の画素座標をそれぞれ対応する該新しい特徴点の該新しい画素座標に近づけて、該元の画像を新しい視線角に対応する新しい画像に変形させるステップとを含む。
(もっと読む)
映像処理装置及び方法
【課題】 レンダリングのための遠近効果の過程において入力深度映像のホールフィリングを極めて迅速に行いながら信頼できる結果を提供する映像処理装置及び方法を提供する。
【解決手段】 入力深度映像が入力されれば、映像処理装置のアウトライアー除去部は全体ピクセルの深度値を分析して平均的な値に一定の程度以上を離れたピクセルを除去し、単独に処理する。そして、ホールをフィリングして入力深度映像を再生成する。この過程において、プッシュプル方法のホールフィリング処理が行われる。
(もっと読む)
体内臓器の動画像生成装置および体内臓器の動画像生成方法
【課題】断面画像において鮮明に表示され難い体内臓器の所定部位を、複数の断面画像から自動的に求めて3次元的な動画像を生成すること。
【解決手段】体内臓器における断面画像を各撮影位置において連続的に撮影する断面画像撮影手段2〜5,7〜14と、断面画像の画像解析を行う画像解析手段6とを有し、画像解析手段6は、連続的に撮影された断面画像のうち最初に撮影された断面画像に対して、ユーザにより設定された所定部位を示すマークを付加し、その後に撮影された断面画像に2次元連続DPを用いてマークを付加することにより全ての断面画像にマークを付加し、マークの重心位置を全ての断面画像について算出し、算出された重心位置に基づいて3次元空間における部位の座標情報求め、座標情報に基づいて3次元的なスプライン曲線を求めて部位の3次元的な形状を求め、部位における3次元的な動画像を生成する。
(もっと読む)
ゲームシステム、ゲーム処理方法、ゲーム装置、携帯ゲーム機およびゲームプログラム
【課題】操作装置に設けられた複数の方向入力部を用いて複数のオブジェクトをそれぞれ移動させる場合に、どの方向入力部がどのオブジェクトに対応しているのかを分かりやすくすること。
【解決手段】オブジェクト制御部は、第1操作装置に設けられた複数の方向入力部にそれぞれ対応付けられた仮想空間内の複数の第1オブジェクトを、対応する方向入力部を通じて入力される方向に応じて個別に移動させる。仮想カメラ制御部は、仮想空間内の第1仮想カメラを制御する。ゲーム画像生成部は、第1仮想カメラに基づいて第1ゲーム画像を生成する。仮想カメラ制御部は、第1ゲーム画像において或る第1オブジェクトが他の第1オブジェクトの表示位置に対して予め定められた側に表示されるように、仮想空間における複数の第1オブジェクトの位置に応じて第1仮想カメラを回転させる。
(もっと読む)
3Dデータ解析のための装置、方法及びプログラムと、微小粒子解析システム
【課題】解析対象とする微小粒子あるいは微小粒子小集団を分布図上で容易かつ直感的に特定でき、これらについての正確な統計データを得ることが可能なデータ解析装置の提供。
【解決手段】微小粒子の測定データを保存するデータ格納部130と、前記測定データから独立した3種の変数を選択する入力部141と、前記3種の変数を座標軸とする座標空間内における位置と図形を計算し、前記微小粒子の特性分布を表す3D立体画像を作成するデータ処理部120と、前記3D立体画像を表示する表示部142と、を有し、前記3D立体画像において、平面によって複数の領域に区分けされた前記座標空間の各領域内の前記図形を領域毎に異なる色で表示する3Dデータ解析装置1を提供する。
(もっと読む)
個人モデルデータの生成方法、生成プログラム、および生成システム
【課題】数値人体モデルに基づき個人モデルデータを高精度、短時間、かつ自動的にシミュレーションして個人モデルデータを生成する。
【解決手段】数値人体モデルモデルポリゴンメッシュと、個人ポリゴンメッシュとを抽出し、値人体モデルのメッシュを変形して、個人データのメッシュに近似した変形人体モデルのメッシュとする体表レジストレーションを行い、変形人体モデルのメッシュをボクセル化して数値人体モデルのボリュームデータを埋め込んで変形人体モデルの内部組織構造を生成し、変形人体モデルの内部組織構造を構成する内部組織の形状を、これら変形人体モデルの内部組織に対応する個人の内部組織の形状に近似させて、変形人体モデルの内部組織構造を変形して、個人内部組織構造とする内部組織レジストレーションを行う。
(もっと読む)
三次元図形入力方法及びその装置
【課題】 三次元空間意識を極力排し、任意に定義した基準面に基づく二次元的な位置感覚を以って立体図形の編集を実現する三次元図形入力方法及びその装置の提供。
【解決手段】 画面上の位置を指定して三次元図形を入力する装置において、既存の三次元空間に、二軸三次元座標系のローカル基準面を定義し当該ローカル基準面を具備する三次元ローカル座標系を定義する基準面設定手段1と、当該三次元ローカル座標系で編集する図形に当該三軸三次元ローカル座標系のローカル座標を適用する座標変換手段2と、を備えることを特徴とする三次元図形入力装置。
(もっと読む)
画像処理装置およびその制御方法
【課題】 製本の仕上がりを高精度に再現できるようにする。
【解決手段】 製本を観察する仮想的な環境と製本方法を設定する設定部と、製本時の3次元形状を保持する保持部と、前記設定に応じた3次元形状を読み込む読込部と、前記3次元形状を用いてプルーフ画像を算出する算出部と、前記算出されたプルーフ画像を表示する表示部とを有する。
(もっと読む)
デジタル人体モデルの特徴データ構造
【課題】本発明は、デジタル人体モデルを用いて、人体の幾何学的形状の特徴を完全に記録し得る、デジタル人体モデルの特徴データ構造を提供することを課題とする。
【解決手段】本発明のデジタル人体モデルの特徴データ構造は、人体の外観特徴を描写するのに用いられて、複数の個体の人体上の特徴点、複数の前記特徴点を通過する囲線及び各囲線上のうちの対応する特徴点をつないだ複数の経線を含む。このうち、例えば前記人体の腕部分の前記囲線は、腕付け根囲、肘囲及び手首囲を含む。このうち、腕付け根囲は、肩先点、腋窩前点及び腋窩後点を通過し、肘囲は、肘前凹点及び肘後凸点を通過し、手首囲は、手部分と前腕部の太さの変化が最も大きい箇所を指す。また、本発明は、腿部、手部、足部の特徴データ構造も開示する。
(もっと読む)
筋力推定装置、プログラム
【課題】関節の動きに関与する複数の筋肉が個々に発揮する筋力の評価を可能にし、所定時間において各筋肉が発揮したエネルギーの評価を可能にする。
【解決手段】人体形状モデル生成手段11は、コンピュータを用いて構築した仮想空間に複数の体節および関節を備えた三次元の人体形状モデルを生成する。関節力算出手段16は、人体形状モデルが指示された動作を行う際に関節ごとの関節力を算出する。筋肉モデル生成手段18は、人体形状モデルにおける関節ごとに当該関節を支持する複数の筋肉について当該筋肉の体積および当該筋肉が体節に付着する位置を定める。筋力算出手段19は、人体形状モデルにおける関節ごとに関節力から求められる筋力を当該関節を支持する複数の筋肉の断面積に応じて配分することにより筋肉ごとの筋力を算出する。
(もっと読む)
三次元グラフィックモデルから生成された画像データを処理する方法
【課題】コンピュータ生成要素と手描き要素の両方を含むアニメーション化されたビデオフレームを制作するための方法を提供する。
【解決手段】ソフトウェアツールは、アーティストがオブジェクトの三次元(3D)グラフィックモデルからレンダリングされたアニメーションフレームと合成する線画を描く(又は他の2D画像データを提供する)ことを可能にする。ソフトウェアツールは、下地の3Dジオメトリをレンダリングする際の変化と矛盾の無いように後続の(又は前の)フレーム内に表示するために、1つのフレームに対して提供されるそのような2D画像データをアニメーション化する方法を決定するように構成可能である。
(もっと読む)
画像処理装置、画像処理装置の制御方法、及びプログラム
【課題】仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる場合における仮想カメラの移動制御を向上させることが可能な画像処理装置を提供すること。
【解決手段】オブジェクト制御部(62)はオブジェクトを仮想空間内で移動させる。移動方向決定部(66)は、オブジェクトの移動方向に対応する方向を仮想カメラの移動方向として決定する。待機部(68)は、オブジェクトの移動が開始されてから待機時間が経過するまで、上記の移動方向への仮想カメラの移動を待機させる。加速部(70)は、待機時間が経過した場合、上記の移動方向に仮想カメラを加速させる。オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果としてオブジェクトが仮想空間内を移動する場合、待機時間設定部(70)は、キャラクタオブジェクトによって行われた上記の動作の種類に基づいて、待機時間を設定する。
(もっと読む)
1 - 20 / 1,034
[ Back to top ]