
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
741 - 760 / 763
画像の歪み補正方法

【課題】 画像の歪曲収差補正を簡便に高精度で行う。
【解決手段】 中央に配置される中心円と等間隔に配置される格子点とを有する歪曲補正図をカメラよって撮影してデジタルデータである実写歪曲補正画像を取得し、該画像における中心円の直径と格子点の間隔との比から理想格子点の位置を決定し、各実写格子点の位置と理想格子点の位置とに基づく補正式を求め、該補正式により歪曲収差を補正する。
(もっと読む)
2次元画像のコピー画像に領域指定した画像を中間画像とし、3次元画像を形成および体積を測定するシステム

【課題】特徴ある画像の領域指定を行なうことにより、2次元画像の接触・重なりにかかわらず3次元画像を形成し、体積を測定するコンピュータ等のシステムを提供する。
【解決手段】2次元画像をディスプレイに表示しA1、その2次元画像のコピー画像A2を中間画像として領域指定を行ないA3、その領域毎にA4、位置と高さ情報を読み取りA5、領域指定毎3次元画像を形成しA6、体積を測定するA7。A1〜A7の機能を有した3次元画像形成および体積測定システム。
(もっと読む)
ディジタル撮像装置
【課題】 安価な構成で移動物体を除去した静止画を撮影することができるディジタル撮像装置を提供する
【解決手段】 複数フレームの画像をCCD撮像素子1で連続撮像する。累積加算部4で、CCD撮像素子1から出力される画像信号をフレーム単位で累積加算する。累積加算部4の出力を累積加算部における累積加算の回数に基づいて、累積加算された画像信号を除算して、正規化する。これにより、移動物体の画像の影響が除去され、移動物体を除去した静止画を撮影することができる。
(もっと読む)
画像符号化装置及び方法
【課題】符号化時の知覚しやすい部分の画質劣化を軽減させ、かつ人間が視覚的に注目する領域の主観的な画質を向上させること。
【解決手段】入力された画像信号についてマクロブロックごとに量子化ステップを設定する量子化ステップ設定部と、マクロブロックごとに利用者の注目度合いを数値で示した注目度を算出する注目度算出部と、マクロブロックごとに、利用者が視覚的に画質劣化を知覚しやすさを数値で示した劣化知覚度を算出する劣化知覚度算出部と、算出された注目度及び劣化知覚度に基づいて、量子化ステップを修正する量子化ステップ修正部と、修正された量子化ステップにより入力された画像信号を量子化する量子化処理部と、を備えたこと。
(もっと読む)
動的変化特性による組織の自動セグメント化装置及び方法
再構成処理器(24)は、造影剤が対象領域(50)に達する前に開始し、対象領域の造影剤の濃度が高くなり(52)、造影剤のピーク(56)に達するように、CTスキャナ(10)のような診断撮像装置から診断データを再構成する。造影剤の濃度が高くなる間に生成する複数の画像はアライメントされる(78)。造影剤がピークに達する間に生成される、画像の対応する画素又はボクセルについての時間対ピーク(64)又は変化率(62)勾配を表す変化マップが生成される。セグメント化処理器(70)は、造影剤を用いずに又は造影剤の濃度ピークで生成される診断画像のセグメント化でその変化マップを用いる。  (もっと読む)
(もっと読む)
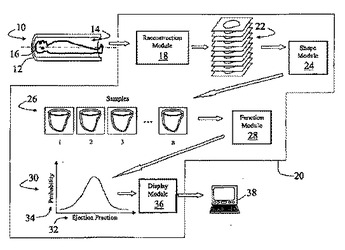
心臓機能の確率的解析
診断イメージング装置(10)は確率論的モデルに基づいて被検体の診断画像の区分化を行う。複数の断層画像の束(22)が、各々の束が遅れずに置換されるようにして生成される。断層画像の束から器官形状の複数解が複数の形状サンプル(26)の形態で計算される。画像を仮定した下での形状の条件付き分布を記述するベイズモデルに従ってサンプル群(24)が生成され、サンプル群の各々について、少なくとも1つの機能パラメータ(32)が導出される。各パラメータについて確率値(30)が導出され、表示(36、38)される。
 (もっと読む)
(もっと読む)
可視的認証パターンを検出、解析および使用するための改良された技法
コピー検出パターンを作成してデジタル表現どうしの間のコピー関係を検出するために使用するための改良された諸技法。該諸技法は、コピー検出パターン内に該コピー検出パターンのエントロピーを改変することなくメッセージを含め、該メッセージを読むための諸技法、アナログ形上のコピー検出パターンを使ってそのアナログ形がオリジナルアナログ形であるかどうかをそのアナログ形のコピー検出パターンのオリジナルのデジタル表現を参照することなく判定するための諸技法、コピー検出パターンを使ったコピー検出の感度を、比較されている二つのコピー検出パターンの一方を修正してコピー処理の結果生じる改変を取り入れることによって高める諸技法、文書全体にわたってコピー検出パターンを分散させる諸技法、およびコピー検出パターンのエントロピーを使ってコピー検出パターンの位置特定をするための諸技法を含む。また、デジタル形とアナログ形の間の変換を含む複製についての、およびデジタル‐デジタル複製についてのコピー検出パターンの用途も開示される。  (もっと読む)
(もっと読む)
画像間のアフィン関係を推定する方法
第1の画像と第2の画像とのアフィン関係を推定する方法(400)が開示される。第1の画像及び第2の画像の各々は、少なくとも4本の互いに平行でない線を有する。方法(400)は、各々の画像の中に現れる線の複数組の交点を識別すること(406)により開始される。次に、方法(400)は、第1の組の交点及び第2の組の交点から、交点間に関係が存在するか否かを判定する(412)。関係が存在する場合、第1の画像及び第2の画像はアフィン関係にあり、アフィン歪は反転されてもよい(418)。 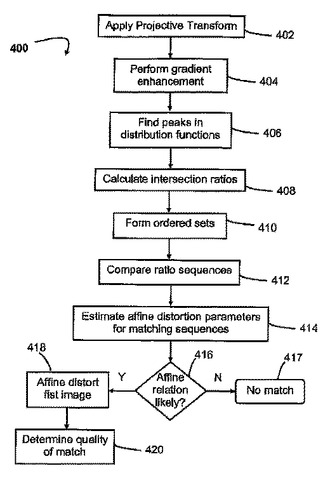 (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 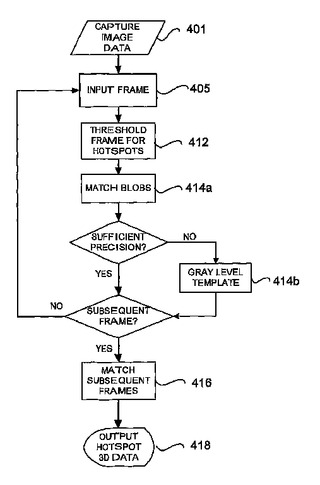 (もっと読む)
(もっと読む)
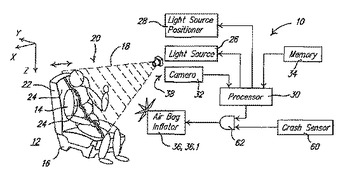
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
ユーザインターフェイスを制御するための方法、システム、およびその方法を実施するための対応するデバイス、ソフトウェアデバイス
本発明は、情報(INFO)が対象方向(Oimage)を有おり、ディスプレイ(20)上にユーザ(21)のために表示された情報(INFO)の方向(Oinfo)を制御するための方法に関連する。この方法においては、ディスプレイ(20)の方向(Odisplay)が、ディスプレイ(20)上に表示される情報(INFO)の方向(Oinfo)との相対的な関係において定義され、ディスプレイ(20)上に表示された情報(INFO)の方向(Oinfo)が、そのために設定された対象方向(Oitgt)とは異なる場合に、方向変更(ΔO)が実行され、その変更の結果として、ディスプレイ(20)上に表示された情報(INFO)の方向が対象方向(Oitgt)に対応するようにされる。ディスプレイ(20)に動作するように接続されたカメラ手段(11)が使用されることで、設定された方法においてインターバル毎に、ディスプレイの方向(Odisplay)が定義される。 (もっと読む)
手持ち式携帯デバイスのための高質・高性能3Dグラフィックスアーキテクチャ
手持ち式携帯デバイスに適した高質および高性能の3Dグラフィックスアーキテクチャが提供されている。この3Dグラフィックスアーキテクチャは、サイズおよび他の特徴によって多角形を分類するためのモジュールを組み込んでいる。一般に、小さく且つ形が整った三角形は、質や性能を何ら犠牲にすることなく(例えば、リアリズム、分解能など)、電力効率がよい回路を有する 「低精度」ユニットを使用して処理することができる。プリミティブを分類し且つより電力効率がよい処理ユニットを選択してプリミティブを処理することにより、質や性能を犠牲にすることなく、電力消費量を低減することができる。 (もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 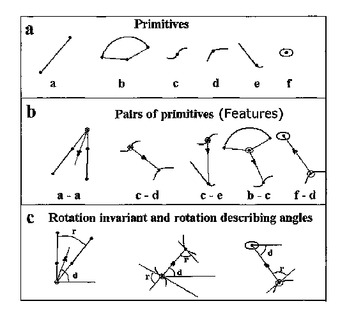 (もっと読む)
(もっと読む)
入力装置から出力装置へのプリンタプロファイルのマッピング
【課題】入力装置から出力装置へのプリンタプロファイルのマッピング。
【解決手段】どこでモニタ装置がマッピングを行うかを予想し、その場所での所望のプリンタ装置の配置を予想することによって、色域の外側で印刷するための方法。入力(A2Bx)プロファイルを予想するプリンタ(B2Ax)プロファイルにおける関係が確立されるとともに、最適な方法でマッピングがもたらされる。マッピングは、色域の外側にある色のためのマッピングを含む出力ICCプロファイル(B2Ax)マッピングを作成するために用いられる。第1に、最も重要な色マッピング(RGBCMYなど)が確立され、これらのマッピングは次いで、ICC出力変換の色域特性の外側を決定するために用いられる。色域の内側の変換は、標準的なレンダリングと同じままに残る。
(もっと読む)
立体視に基づく差し迫った衝突の検知
場面の奥行きマップを生成するため処理される画像を生成する立体カメラを有する立体視に基づく衝突回避システム。潜在的な脅威を、奥行きマップにおいて検知する。そして、検知した潜在的な脅威の大きさ、位置、および速度を推定し、推定した位置および推定した速度を用いて、検知した潜在的な脅威の軌道解析を決定する。軌道解析に基づく衝突予測を決定し、衝突が差し迫ったものであるかどうかを、衝突予測および推定された潜在的な脅威の大きさに基づいて決定する。 (もっと読む)
深度データを用いたビジュアルトラッキング
【課題】深度感知撮像技術を用いたリアルタイムビジュアル画像トラッキングにより、照度不変のトラッキング性能が得られる。深度感知(タイムオブフライト)カメラによって、同じ場面がリアルタイムで深度と色を持つ画像として提供される。深度ウィンドウはシャッター速度を制御してトラッキングする領域を調整する。深度画像データからポテンシャル領域が導き出され、トラッキングする目標物体の周縁部の情報が得られる。数学的に表される輪郭はトラッキングする目的物体をモデリングすることができる。この輪郭とトラッキングする目的物体の周縁部との間の適合度を決定し、深度データに基づいて、トラッキングのための位置情報が得られる。画像トラッキングに基づいて深度センサを用いる用途としては、頭部トラッキング、手のトラッキング、姿勢推定、ロボットの命令画定および、その他の人間とコンピュータの相互関係システムが挙げられる。 (もっと読む)
画像用の電子指紋及び透かし
透かし又は指紋の適用のために画像をグリッド領域に分割する方法は、グリッドを中心に合わせるために画像の重心を計算する段階と、画像の一部の重心をグリッドのサイズを設定するために使用する段階とを有する。
 (もっと読む)
(もっと読む)
人体検出装置
【課題】 本発明は、安定した人体の動きの検出を行うことができる人体検出装置を提供することを課題とする。
【解決手段】 撮像装置により撮像した画像データの出力値が一定範囲となるようにオフセット調整するオフセット調整手段を設けることで、画像検出部に製作上のバラツキが生じても、装置全体として補正することが可能となり、撮像する画像データの値を一定にすることができ、動きの量をずれなく演算することができて、人体の検出の安定化を図ることができる。また、オフセット調整手段により調整した調整値を不揮発性半導体メモリに記憶しておくことで、撮像の都度調整する必要はなくなり、工場出荷時に記憶させておけば現場設置後もそのまま使用することができる
(もっと読む)
画像処理装置
【課題】 撮像装置で撮像した画像データの色収差量を検出してその補正を行うことができる画像処理装置を提供する。
【解決手段】 本発明は、原画映像メモリ1と、原画映像読み出し部2と、原画像データの二次元座標の座標変換を行う座標変換部3と、色収差補正後の画像データを格納する結果映像メモリ4と、結果映像メモリ4に画像データを格納する制御を行う映像書き込み部5と、結果映像読み出し部6と、原画映像メモリ1内の画像データと結果映像メモリ4内の画像データとを比較して両データの差分を検出する比較部7と、差分を累積加算する積分カウンタ8と、コントローラ9とを備えている。撮像装置で撮像された画像データを構成する複数の色成分間のピクセル値の差分を検出し、差分の累積加算値が最小になるように一部の色成分の座標変換を行うため、撮影済みの画像データの色収差を精度よく補正することができる。
(もっと読む)
741 - 760 / 763
[ Back to top ]