
Fターム[5B057DB05]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 白黒 (782)
Fターム[5B057DB05]に分類される特許
761 - 780 / 782
画像処理装置、画像処理方法、露光装置、およびデバイス製造方法
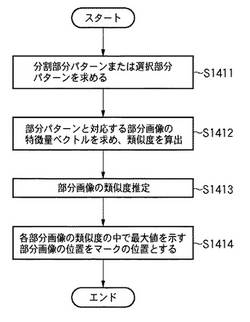
【課題】 対象物画像中の対象物領域の誤認識が抑制された画像処理技術を提供すること。
【解決手段】 対象物画像中の対象物の位置を求める画像処理装置は、対象物画像中の各部分画像および基準画像に関し、対応する部分領域毎に類似度を計算する第1の計算手段と、各部分画像に関し、第1の計算手段により計算された複数の類似度の統計値を計算する第2の計算手段と、第2の計算手段により計算された複数の統計値のうちの最大値に対応した対象物画像中の部分画像の位置を対象物の位置として認識する認識手段とを有する。
(もっと読む)
画像処理装置とこれを用いた手術支援システム

【課題】操作者の作業量と操作者の主観判断への依存を極力減らし,断層画像から線状組織と塊状組織を分類する手術支援システムを提供する。
【解決手段】断層画像データ上に領域分割したい組織臓器に属する点を1点以上教示点として付与させる。線状組織と塊状組織で異なる情報を教示点に付与することで,組織臓器の解剖的特長に適した処理が可能になる。線状組織の領域分割を塊状組織の領域分割に先行して行うことで,後者の検出の精度を高める。線状組織の領域分割では,付与された教示点間の接続関係に基づき,教示点間を接続する組織の軸線と太さを決定して,各線状組織に属する領域を決定する。塊状組織の領域分割では,容易に分割可能な外包領域と内部領域への分類の後に,未分類の点を既分類の区分に帰属させる演算を繰り返し,未分類の点がなくなるまで反復する。
(もっと読む)
画像の時間順序における動き補償用の方法およびシステム
画像の時間順序における動き補償を実行するための方法およびシステムは、画像の一方をワープするための変位場を得るために対応する領域の局所相互相関に基づいて、2枚の画像の間の類似性測度の共役勾配最大化を実行するステップを含む。変形の非特異性は、解法を構築するときに、類似性測度の正規化された勾配の合成を使用することによって確実にされる。  (もっと読む)
(もっと読む)
男女識別方法
テレビカメラ(2A)からの撮像信号(VDA)によって判定対象とする人物(P)の赤外線顔画像データを得(11)、赤外線顔画像データに基づいて人物(P)の頬部及びあご部の温度を抽出してこれらの平均温度を算出し(15、16)、頬データ/あごデータを算出する(17)とともに、頬強調分散値を算出する(18)。頬データ/あごデータと頬強調分散値とをX、Y平面上に展開し(19)、この結果に基づいて人物(P)の男女判定を行う。さらに、頬データ/あごデータによる男女判定(21)及び頬強調分散値による男女判定(22)を行い、これら複数の男女判定結果の2つ以上の一致にしたがって男女識別(24)を行う。 (もっと読む)
心臓機能の確率的解析
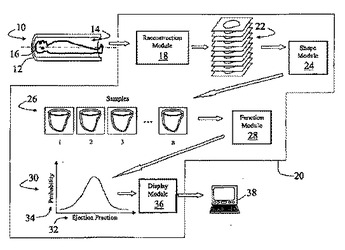
診断イメージング装置(10)は確率論的モデルに基づいて被検体の診断画像の区分化を行う。複数の断層画像の束(22)が、各々の束が遅れずに置換されるようにして生成される。断層画像の束から器官形状の複数解が複数の形状サンプル(26)の形態で計算される。画像を仮定した下での形状の条件付き分布を記述するベイズモデルに従ってサンプル群(24)が生成され、サンプル群の各々について、少なくとも1つの機能パラメータ(32)が導出される。各パラメータについて確率値(30)が導出され、表示(36、38)される。
 (もっと読む)
(もっと読む)
臓器特定領域装置及び方法
所望の領域の輪郭やこの輪郭によって特定される層状領域などの特定領域の抽出を簡単な操作で短時間で行えるようにする。そのために、(a)前記画像を表示するステップ、(b)前記画像内の所望の領域を選択するステップ、(c)前記所望の領域内の部分領域の少なくとも一部の輪郭に対応する要素図形を選択するステップ、(d)前記部分領域の少なくとも一部の輪郭に、前記要素図形の少なくとも一部の輪郭を近似させるステップ、(e)前記ステップ(c)〜(d)を2回以上繰り返すステップ、(f)前記近似後の各要素図形の少なくとも一部の輪郭を組み合わせた輪郭を第1の輪郭とするステップ、からなる方法で所望の領域の輪郭を抽出する。そして、更に(j)前記第1の輪郭に基づいて第2の輪郭を求めるステップ、(k)少なくとも前記第1の輪郭と前記第2の輪郭とに挟まれる層状領域を含む領域を抽出するステップ、から成る方法で特定領域の抽出を行う。 (もっと読む)
構造定位のための臨床ツール
【課題】医療介入中に、臨床医が、患者の体内の構造を定位するのを補助するシステムを提供する。
【解決手段】画像誘導プロシジャ中に体内構造を定位する方法は、1つの標的構造と選択された複数の基準構造とを含む体部分の3次元画像を取得すること、標的構造及び基準構造のそれぞれのロケーションを規定するための、ランドマーク点座標のセットを求めること、標的構造及び基準構造についてのランドマーク点のロケーションを関連付ける三角形パラメータを計算すること、並びに、画像誘導プロシジャ中に、基準構造が特定されている術中画像上に標的構造の推定されるロケーションをプロットするために、計算された三角形パラメータを使用することを含む。
(もっと読む)
画像処理方法及びその手段
NMR像における識別を可能にする方法及び手段であって、(コントラスト後の動的画像等の)対象の連続画像の画素値における誘起された変化を記録する画像の時系列の一つであり、画像への寄与は特定の組織(例えば、脂肪)の画像対象内の存在から生ずるものを提供する。この識別は、時系列を形成する複数の独立した画像から得られた動的データ(例えば、コントラスト剤の取得に起因した画素値の変化)を用いて実行される。  (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 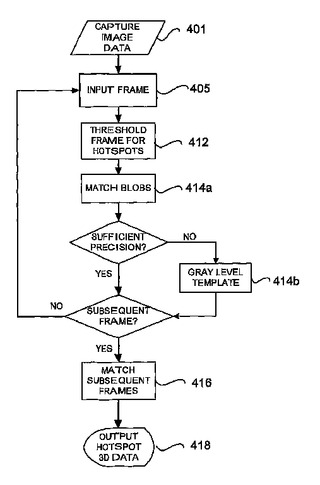 (もっと読む)
(もっと読む)
乗員検出システム
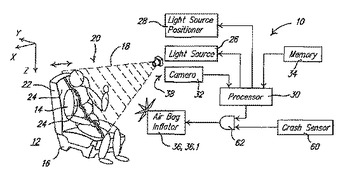
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
画像などの既存の位相情報を有するデータ配列を処理するためのニューラルネットワーク及び該ネットワーク使用方法
相対的な位相情報を有するデータ配列を処理するためのニューラルネットワークであって、人工ニューラルネットワークのノットに対応するセル(Ki)のn次元配列を備え、前記セルのそれぞれが、前記セル(Ki)に直接隣接するとともに該セル(Ki)の近傍を形成する周囲のセル(Kj)に対する結合を備え、前記セル(Ki)のそれぞれが、前記周囲のセルに直接隣接する1つのセルへの各結合のためのインプットを備えるとともに、1つ若しくはそれ以上の前記直接隣接するセル(Kj)への結合のためのアウトプットを備え、前記セル(Ki)と前記直接隣接するセルの間の前記結合が重み(wij)により決定され、前記セルのそれぞれが、前記セル(Ki)の活性値或いは活性化関数(Ai)として定義される内部値により特徴付けられ、前記セル(Ki)のそれぞれが、信号処理を実行することによりセルのアウトプット信号(ui)を作り出し、セル(Ki)の前記出力信号(ui)が前記直接隣接するセルの入力値の関数であり、セルのそれぞれが、対応するセルの開始値であり、前記ニューラルネットワークの特定数の相互作用的処理段階の後に、セル(Ki)の内部値或いは出力値(ui)を、一意的に関連付けられたデータ・レコード(Pi)のための新たに得られた値(Ui)としてみなすことにより、処理が行われることを特徴とするニューラルネットワークである。 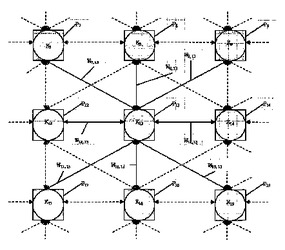 (もっと読む)
(もっと読む)
局所的曲率分布パターンの分析方法
複数の3Dボリューム・ポイントを含むディジタル画像中の病変部位及びポリープを検出する方法を提供する。この方法は、画像中の曲面を識別し(101)、曲面中のそれぞれのポイントに関して、第1曲率測度を計算し(102)、曲面中のそれぞれのポイントに関して、それぞれのポイントが1組のリングの中心点となり、それぞれのリングがこのリングの中心点から測地学的に等距離であるようにそれぞれのポイントを中心に1組のリングを形成し(103)、それぞれのリングに関して、第1曲率測度の標準偏差を計算し(104)、第1曲率測度の標準偏差が最小のリングを選択する(105)ステップを含む。選択されたリングに関して、第1曲率勾配を計算し(107)、曲率勾配がポリープまたは病変部位として予測されるパターンから逸脱しているポイントを曲面から消去する(108)。 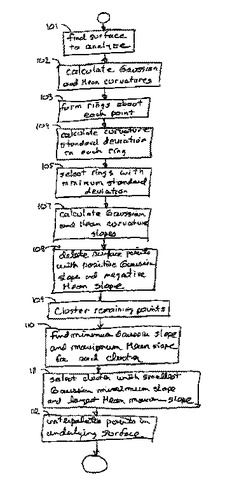 (もっと読む)
(もっと読む)
車両システム
両システムを操作する操作装置と、操作装置を介する車両システムの操作を制御する制御部とを備えた自動車における運転のための車両システムにおいて、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかを識別するために構成されている装置が設けられおり、制御部は操作装置を介する車両システムの操作を少なくとも、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかに依存して制御するよう構成されていることを特徴とする、車両システムが提案される。独立請求項の特徴を備えた本発明による車両システムは、車両システムに車両ドライバがアクセスするか、その他の車両の乗員がアクセスするかに依存して操作が制御されるという利点を有する。したがって、車両ドライバを本来の運転任務から過度に注意を逸らさせる可能性のある操作アクセスは効果的に阻止される。しかしながらそれと同時に車両システムはその他の車両乗員に対して少なくとも広範に操作可能のままであるか、完全な範囲で操作可能のままである。 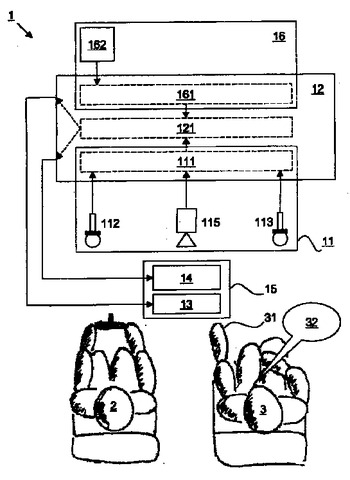 (もっと読む)
(もっと読む)
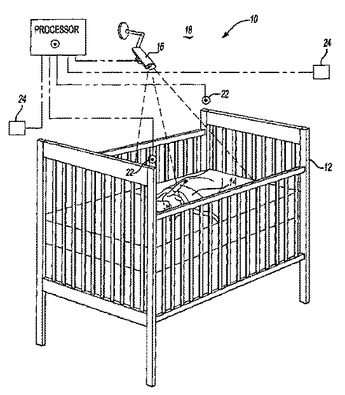
就寝中の乳幼児を監視する方法
コントローラに第1の複数のピクセルの位置情報を信号送出することによって、幼児の参照イメージを生成する、突然死症候群に関連する幼児の危険度の高い動きを検出する方法。第1の複数のピクセルは参照イメージを生成するコントローラに保持される。幼児の第2の電子イメージがそのコントローラに信号送出される第2の複数のピクセルを生成している。このコントローラは、その幼児が危険度の高い動きをしたかどうかを決定するために、第1の複数のピクセルと第2の複数のピクセルとの相関関係を検出することにより、第2の電子イメージを第1の電子イメージと比較する。
 (もっと読む)
(もっと読む)
非侵襲的な定量心筋灌流評価
心臓灌流を定量的に評価するためのコンピュータ可読媒体、装置及び方法。一連の心臓画像に表される心筋は、画像セグメントに分割され、画像セグメントは、少なくとも1の画像ピクセルを有する。心臓灌流パラメータが、前記画像セグメントの各々について決定される。正規灌流パラメータ値を有する少なくとも1の画像セグメントが、選択される。そののち、残りの画像セグメントの心臓灌流パラメータは、正常灌流を有する前記画像セグメントの前記正規灌流パラメータ値に基づくものにされる。一実施例によれば、灌流パラメータは、前記心筋におけるコントラスト剤の分布に関する時間−強度プロファイルの最大上り勾配である。正規最大上り勾配が、少なくとも1の画像セグメントについて導き出され、相対的な最大上り勾配が、それぞれのセグメントについて、正規最大上り勾配に対して計算される。これらの値に基づいて、負荷時に導き出される心筋灌流パラメータと、安静時に導き出される心筋灌流パラメータとの比率が、それぞれのセグメントについて計算されることができる。例えば心筋灌流予備能指数(MPRI)が、安静時及び負荷時に導き出される相対的な最大上り勾配の比率として、それぞれの画像セグメントについて計算される。  (もっと読む)
(もっと読む)
医療適用で画像位置合わせ及び画像操作を容易とするプローブ位置測定
【課題】 画像形成中にセンサ位置及び向きを正確に知ることができる医療画像処理に関する方法を提供することを目的とする。
【解決手段】 医療画像処理適用に関連する画像を位置合わせするのに撮像プローブを用いる方法は、(a)撮像プローブがその中で用いられるローカルな領域中にフィールドを発生するローカル追跡システムを設ける段階と、(b)略同じ対象を表わす第1及び第2の画像を捕捉する段階と、(c)画像捕捉中の撮像プローブの位置座標を決定するのにローカル追跡システムからのフィールド放射を感知する段階と、(d)第1及び第2の画像を位置合わせするのに位置座標を用いる段階と、(e)対象の特徴を決定するのに位置合わせされた画像を用いる段階とを有する。
(もっと読む)
画像処理装置
【課題】 効率的な画像読み取り動作、画像処理を行う画像処理装置を提供する。
【解決手段】 画像処理装置100において、制御部10が、画像読み取り部20により読み取られた原稿の一部分の画像の輝度ヒストグラムを作成し、その輝度ヒストグラムに基づき、最適なガンマ補正を実施するためのガンマ補正データを選択し、その選択されたガンマ補正データに基づいて、原稿の全体画像を読み取る本スキャン時にガンマ補正を実施する画像処理制御を行う構成にした。
(もっと読む)
ビジュアルサーボによる位置姿勢制御方法
【課題】 ビジュアルサーボによる位置姿勢制御においてカメラの縦揺れ角および偏揺れ角(姿勢角)の検出精度向上を図る。
【解決手段】 ロボット本体11は、制御装置12により位置の移動と姿勢の駆動制御がなされる。CCDカメラ15は、ロボット本体11の上アーム20に固定され、ワークWを撮影する。あらかじめ参照画像として基準位置からワークWを撮影したデータを記憶させる。制御装置12は、カメラ15で撮影した画像と参照画像のデータとに基づいてビジュアルサーボにより位置姿勢の制御を行なう。収束した段階では、カメラ15を姿勢角を所定以上傾けて画像データを取得する。このとき各画像での姿勢角と参照画像のデータとの誤差値を演算し、誤差値が最も小さくなるときの姿勢角を推定し、補正量として求める。この補正量だけ位置姿勢を制御することで、精度の高い制御を行なうことができる。
(もっと読む)
人体検出装置
【課題】 本発明は、安定した人体の動きの検出を行うことができる人体検出装置を提供することを課題とする。
【解決手段】 撮像装置により撮像した画像データの出力値が一定範囲となるようにオフセット調整するオフセット調整手段を設けることで、画像検出部に製作上のバラツキが生じても、装置全体として補正することが可能となり、撮像する画像データの値を一定にすることができ、動きの量をずれなく演算することができて、人体の検出の安定化を図ることができる。また、オフセット調整手段により調整した調整値を不揮発性半導体メモリに記憶しておくことで、撮像の都度調整する必要はなくなり、工場出荷時に記憶させておけば現場設置後もそのまま使用することができる
(もっと読む)
光学機器の調整および検査システム
【課題】 単純な構成で且つ精度の高い位置補正を行い、かつ、シェーディング補正を行うことのできる光学機器の調整および検査システムを提供する。
【解決手段】 チャート100を用いて基準画像を撮影し、撮影した基準画像から相対座標基準点の絶対座標と、取得したい画像特性のある座標を相対座標基準点からの相対座標で表して水平垂直方向の位置補正量を導出する第1の演算手段(CPU401および記録装置402)と、チャート100を撮影して前記相対基準点近傍を走査して前記相対座標基準点の絶対座標を求め、基準画像と撮影画像の相対座標基準点とを比較して水平垂直方向の画角補正を行う第2の演算手段(CPU401および記録装置402)とを備えた。
(もっと読む)
761 - 780 / 782
[ Back to top ]