
Fターム[5B057DB09]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 多値 (10,652)
Fターム[5B057DB09]に分類される特許
2,021 - 2,040 / 10,652
車両用白線認識装置

【課題】簡単な演算処理により、二重白線等に対しても高精度で安定した白線認識を行うことができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、画像上に設定された第1の白線検出領域A1内の検索ラインLx上での輝度変化に基づいて第1の白線開始点Pjを検出し、第1の白線開始点Pjからなる点群の近似線apを演算する。近似線apの車幅方向内側に白線探索線Lyを設定し、白線探索線Ly上の輝度情報に基づいて近似線apの車幅方向内側で白線を探索し、白線が存在するとき、車幅方向内側の領域を拡張した第2の白線検出領域A2を設定し、第1の白線開始点Pjと重複しない第2の白線エッジ点を検出し、設定条件に基づいて選定した第1の白線開始点Pj或いは第2の白線開始点PKからなる点群に基づいて白線を演算し、演算した白線に基づいて第1の白線検索領域A1を設定する。
(もっと読む)
画像処理装置、画像処理システム、及び画像処理方法

【課題】特に文字画像を解析し滲みを検出して、印刷物上の滲みを低減することが可能な画像処理装置及びその方法とを提供することである。
【解決手段】スキャナにより文字画像の原稿を読み取って画像データを生成し、その画像データが表現する文字画像の滲みや劣化を検出する。次に、その検出された滲みや劣化に対応する部分を前記画像データから除去する。そして、その滲みや劣化に対応する部分が除去された画像データを画像出力部に出力する。
(もっと読む)
半導体装置の欠陥検査方法
【課題】効率的に検査領域を設定することが可能な半導体装置の欠陥検査方法を提供する。
【解決手段】NonパターンDie10及びパターンDie11を比較して第1の仮パターンを取得し、第1の仮パターン第1の微細部分の集合とし、第1の仮パターンのY座標それぞれについて、隣り合った第1の微細部分間のX軸方向の座標差が所望の値より大きくなる第1の微細部分を抽出し、抽出された第1の微細部分から第1のエッジ領域を規定し、NonパターンDie及びパターンDieを90度回転させて比較して第2の仮パターンを抽出し、第2の仮パターンを第2の微細部分の集合とし、第2の仮パターンのY座標それぞれについて、隣り合った第2の微細部分間のX軸方向の座標差が所望の値より大きくなる第2の微細部分を抽出し、抽出された第2の微細部分から第2のエッジ領域を規定し、第1及び第2のエッジ領域に囲まれている領域を検査領域として導出する。
(もっと読む)
走行支援装置および走行支援方法
【課題】検出対象を回避する必要があるかを適切に判断可能な走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段20a,20bと、撮像手段20a,20bにより撮像された画像の情報に基づいて、画像内に存在する特徴点を抽出する特徴点抽出手段と、特徴点の移動方向および移動速度を含む移動情報を算出する移動情報算出手段と、移動情報に基づいて、検出対象を含む対象領域を抽出する対象領域抽出手段と、撮像手段20a,20bから見た検出対象の移動速度を、相対角速度として算出する相対角速度算出手段と、相対角速度に基づいて、検出対象を回避する必要があるかを判断する判断手段と、を有することを特徴とする走行支援装置。
(もっと読む)
画像処理装置及び画像処理方法
【課題】広角カメラ特有のカメラ特性を考慮した、高画質及び高効率の画像圧縮を行うこと。
【解決手段】画像処理装置100は、カメラ部11によって得られた撮像画像を複数の領域に分割する領域分割部101と、領域分割部101によって分割された各領域画像を、撮像画像の所定の点から各領域画像までの距離l及びカメラ部11から各領域に含まれるターゲットまでの距離dに応じて圧縮率を変化させて圧縮する画像圧縮部105とを有する。例えば、画像圧縮部105が光軸からの角度が大きな領域画像ほど大きな圧縮率で圧縮することにより、低品質の領域のデータ量が大幅に減らされ、高品質の領域の品質を維持した圧縮が行われる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より高品質なフォトモザイク画像を得ることができるようにする。
【解決手段】候補選択部23は、制作目標画像を複数のブロックに分割して、各ブロックを複数の素材画像のうちの何れかに置き換えることで、フォトモザイク画像を生成する場合に、制作目標画像の候補となる複数の制作目標候補画像の指定を受け付ける。分割部51は制作目標候補画像を複数のブロックに分割し、クラス分類部54は各ブロックを、色に関する特徴により定まる複数のクラスの何れかに分類する。クラス分類部55は、複数の素材画像をクラスに分類する。制作目標画像決定部60は、制作目標候補画像のそれぞれについて得られた、クラスに属すブロックの数と素材画像の数との比較結果に基づいて、各クラスにおいてブロックに対する素材画像の不足数の少ない制作目標候補画像を、制作目標画像として選択する。本発明は、画像処理装置に適用することができる。
(もっと読む)
車両検査装置
【課題】本発明の第一の目的は、車輪側面のきず等の特徴量を検出するに当たり、その存在する位置を絶対位置との関係で特定するための基準マーク検出手法を備えた車両検査装置を提供することにある。
【解決手段】入力した鉄道車両車輪側面の画像から車輪上の特徴量を検出し、入力した鉄道車両車輪側面の画像から車輪中心の座標を検出し、入力した鉄道車両車輪側面の画像から基準マークを検出してその座標を決定し、車輪中心の座標と基準マークの座標を基準として決定された特徴量の位置を記憶する。
【効果】特徴量の位置を特定するための絶対位置である基準マークを検出することができるので自動的な車両検査を可能とする。
(もっと読む)
車両用撮像装置
【課題】演算負荷が増大することを防止しつつ消失点の検出精度を向上させ、車両の走行中での光軸補正を消失点に基づき精度よく行なう。
【解決手段】車両用撮像装置10は、車載カメラ11から出力された撮像画像においてオプティカルフローを演算するオプティカルフロー演算部21と、オプティカルフローに基づき車載カメラ11の光軸を補正する光軸補正部26と、オプティカルフローのX成分およびY成分を算出するXY成分算出部22と、オプティカルフローのX成分またはY成分の大きさが所定閾値以上である画像領域を抽出する画像領域抽出部23と、オプティカルフローのX成分またはY成分の大きさが所定閾値以上である画像領域に基づきオプティカルフローの消失点を算出する消失点算出部25とを備え、光軸補正部26は、消失点に基づき車載カメラ11の光軸を補正する。
(もっと読む)
車両周辺画像提供装置
【課題】トップビュー画像生成の際に白飛びを避けるように画像を生成して車両周囲の表示をすることが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、車両周辺の画像を取得可能に設置された複数のカメラと、車両の画像のデータを予め格納すると共に、カメラにより取得された画像のデータを逐次格納する記憶手段と、記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段と、を備える。制御手段は、各カメラにより取得された画像間の境界領域となるつなぎ目の付近の所定数の画素を抽出して輝度値を算出し、輝度値が白飛びを規定する所定の値以上のときに、白飛びの発生しない位置につなぎ目を変更して新たなつなぎ目とするつなぎ目調整処理を行い、車両周辺の画像を合成する。
(もっと読む)
画像変換装置および画像変換プログラム
【課題】操作者が筆記した文字や線などの筆跡を、筆跡の領域幅、止め、はらいなどを含め、光学撮像方式により筆記された状態のまま記録することができる画像変換装置および画像変換プログラムを提供する。
【解決手段】記録媒体12には座標位置を示す図形が規則的に配置されている。座標位置特定部23は、筆記具11内の撮像部21によって撮像された撮像画像から図形を抽出し、座標位置を特定する。また図形読取部24は、撮像画像内の図形の数を特定する。一方、接触状態検出部22は筆記具11と記録媒体12との接触状態を検出する。対応付け部25は、特定された座標位置から算出された筆記速度と接触状態の検出結果とともに、図形の数の増減から、筆記された筆跡の領域幅を制御し、座標位置と対応付けて筆跡の情報を筆跡記録部26に記録する。
(もっと読む)
画像追尾装置および画像追尾方法
【課題】画像内の移動被写体とは異なる被写体を移動被写体として誤検出するという問題を解決する。
【解決手段】画像追尾装置は、結像光学系により結像される被写界の被写界像を繰り返し撮像して、被写界画像を生成する撮像手段と、被写界画像における第1探索領域内の画像情報と対象となる画像に基づく基準情報との間の相関を示す第1演算結果を演算するとともに、被写界画像における第1探索領域とは異なる第2探索領域内の画像情報と基準情報との間の相関を示す第2演算結果を演算する演算手段と、第1演算結果と第2演算結果との一方に基づいて、被写界画像における対象となる画像の位置を検出する検出手段とを備える。
(もっと読む)
立体画像生成装置
【課題】立体画像に対してより立体感を出せ、水系を容易にたどれる視覚化立体地図を得る。
【解決手段】DEMデータ作成部6と、DEM読込間隔設定部7と、パラメータ計算部8と、立体赤色マップ作成部20と、傾斜画像階調補正部22と、地上開度画像階調補正部23と、地下開度画像階調補正部21と、L*チャンネル化部26と、b*チャンネル化部25と、a*チャンネル化部27と、L*a*b*カラー式画像化部と、階調補正部29と、XYZ表色系変換部と、RGB表色系変換部31と、合成部32と、微調補正部33、傾斜スペクトラム算出部52と、地下開度スペクトラム算出部51と、地上開度スペクトラム算出部53等を備えて、画像を地下開度が高い谷や窪地をシアン色に、地上開度の大きい尾根や頂上を赤色に調整し、この地上開度−地下開度調整画像を、赤色立体地図と重ねあわせ合成することによって画像(KLi)を得る。
(もっと読む)
画像処理装置
【課題】顔の特徴部位の座標位置の検出処理に多くの時間を要しており、また、当該検出の精度向上が望まれていた。
【解決手段】画像に含まれる顔の特徴部位の座標位置を検出する画像処理装置であって、注目画像から顔の少なくとも一部を含む画像領域を顔領域として検出する顔領域検出部と、上記顔領域を含む所定範囲の画像を上記注目画像からトリミングするトリミング部と、上記トリミングされた画像のサイズを所定サイズに変換する変換部と、上記サイズが変換された画像に基づいて上記特徴部位の座標位置を検出する特徴位置検出部とを備える。上記変換部は、上記トリミングされた画像に対するノイズ低減のための処理とともに上記サイズの変換を実行する。
(もっと読む)
画像読取装置
【課題】色成分毎のラインセンサのうち、所定のラインセンサに対応する画像読取位置に付着した異物を適切に検出することが可能な複合機を提供する。
【解決手段】ライン間補正後の色成分毎の画像データのうち、選択された一の色成分の画像データの一次微分値の絶対値が第一基準値を超過した画素を、仮異物領域の開始画素とし、当該一の色成分の画像データが、当該開始画素の画像データ以上となる画素を、仮異物領域の終了画素として仮異物領域を検出する仮異物領域検出手段502と、前記仮異物領域に対応する他の色成分の開始画素の画像データと、当該他の色成分の仮異物領域内の画像データの平均値との差が第二基準値未満であることを判定することによって、一の色成分の画像データを読取ったラインセンサに対応する読取位置に異物が存在すると判定する異物判定手段503と、を備えることを特徴とする複合機100を提供する。
(もっと読む)
画像検査装置、画像検査方法、プログラムおよび記録媒体
【課題】印刷媒体の読み取り時の位置ずれを考慮して、エッジを含む線画像を精度よく検査し、印刷媒体の良否を判別する。
【解決手段】境界認識部704、705はそれぞれメモリ画像702、検査画像703の境界を認識し、線検出部706は境界認識の結果を基に線を検出する。第一の検査部707はメモリ画像と検査画像のエッジ以外の画像を比較して検査し、第二の検査部708は基準画像と検査画像について、エッジを含む線画像を比較することにより検査する。
(もっと読む)
経時的な動的挙動に基づくパラメトリック画像
データ処理方法は、分析期間の臓器を表す一連インプット画像を提供するステップであって、個々のインプット画像は、分析期間内の対応する取得瞬間における臓器の対応する位置の呼掛信号に対する応答を、各々が示すインプット値のセットを含む、ステップと、選択された位置のセットの内の各々と時間に関する分析関数を関連付けるステップであって、分析関数は一連インプット画像内の選択された位置のインプット値の傾向をモデル化する、ステップと、分析関数に対して時間に関する参照関数を提供するステップと、個々の選択された位置の分析関数を、選択された位置の分析関数と参照関数との間の発散の極性の分析期間における傾向を表す極性傾向を判別する参照関数と比較するステップと、個々の選択された位置に対するパラメトリック値を含むパラメトリック画像を生成するステップであって、パラメトリック値は選択された位置の極性傾向を示す、ステップとを含む。 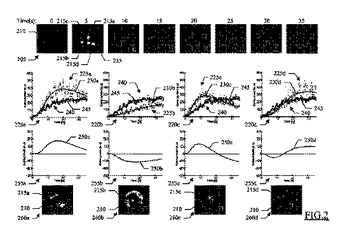 (もっと読む)
(もっと読む)
画像領域分割装置、画像領域分割方法および画像領域分割プログラム
【課題】個々の画素の画素値に影響されずに類似画像領域を分割し、分割精度を向上させることができる画像領域分割装置を提供する。
【解決手段】RGB表色系の入力画像の画素値を色相、彩度、明度の表色系に変換し、該変換された表色系空間をK個の基本色の領域に分ける表色系変換部204と、前記入力画像を部分領域に分割する処理および階層化が施された前記各部分領域における、基本色が同一で連続している領域を同一領域と見なしてマージし、画像領域に分割する処理を行なう分割部205と、分割された部分領域を任意に設定した領域単位数で階層構造化する階層構造化部206と、前記各領域毎に属する基本色を決定する色差計算部207、ヒストグラム計算部208、基本色決定部209と、前記各部分領域を、前記基本色決定部209により決定された基本色で埋めて縮色画像を作成する処理を行なう縮色処理部210とを備える。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】画像データに有彩色が含まれている場合はその画像データに含まれているグレーを複数色の濃度の組み合わせで表現し、有彩色が含まれていない場合は黒単色の濃度で表現する場合において、より早い段階で変換データを出力できる画像処理装置を提供する。
【解決手段】画像処理装置は、有彩色を含む部分データより前にグレーを含む部分データを取得した場合は出力を待機し、待機開始後に有彩色を含む部分データを取得した場合は、グレーを複数色の濃度の組み合わせによって表現した変換データである複数色変換データを出力する一方、待機開始後に有彩色を含む部分データを取得することなく画像データの取得が終了した場合は、グレーを黒単色の濃度で表現した変換データである黒単色変換データを出力し、有彩色を含む部分データを取得した場合はそれ以後に取得する部分データを複数色変換データに変換して出力する。
(もっと読む)
画像処理装置、画像処理システムおよび画像処理方法
【課題】濃度値にピークを持たないエッジであってもエッジ座標をサブピクセル単位で求める。
【解決手段】画像処理システム1では、撮像装置2によって対象物Aが撮像される。画像処理装置3のエッジ候補検出部33は、対象物Aが撮像された濃淡画像内においてエッジ候補を画素単位で検出する。検査領域設定部34は、濃淡画像にエッジ候補とこのエッジ候補の両側に位置する複数の画素からなる検査領域を設定する。2次微分値算出部35は、検査領域内の各画素に対してエッジ抽出フィルタを用いて濃度値の2次微分値を求める。エッジ座標算出部36は、エッジ候補に隣接する2組の隣接画素群のうち、2次微分値の符号が異なる組み合わせが多い隣接画素群を第2のエッジ候補として選択する。上記エッジ座標算出部36は、エッジ候補の2次微分値と第2のエッジ候補の2次微分値とを用いて、検出対象エッジのエッジ座標をサブピクセル単位で求める。
(もっと読む)
画像処理方法および画像処理装置
【課題】モノクロ画像のより鮮やかなカラー化を実現する。
【解決手段】モノクロ画像の各画素に対して、次の(a)〜(d)を満たすように当該画素の明るさを表す画素値に応じて色を決める。(a)画素値のとり得る数値範囲内の最小値には黒色が対応し、画素値が大きいほど明度の大きい色が対応し、最大値には白色が対応する。(b)最小値付近の画素値には青色域の色が対応する。(c)最大値付近の画素値には黄色域の色が対応する。(d)最小値付近から最大値付近までの画素値には、青色域から赤色域を経て黄色域へ至る色相範囲内の色が対応し、または青色域から緑色域を経て黄色域へ至る色相範囲内の色が対応する。
(もっと読む)
2,021 - 2,040 / 10,652
[ Back to top ]