
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,021 - 2,040 / 2,719
視覚探索方法
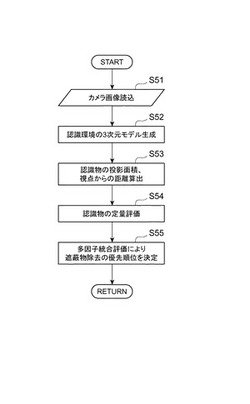
【課題】 探索対象物以外にも物体が存在している場合に、他の物体による隠れを考慮して探索を行う視覚探索方法を提供する。
【解決手段】 視覚センサ(例えば、ステレオカメラ)により対象物を探索した場合に、対象物が見つからない場合、認識環境の3次元モデルを生成し(ステップS52)、認識物の投影面積、視点からの距離を算出し(ステップS53)、それらと対象物の形状データから定量評価を行い(ステップS54)、多因子統合評価により遮蔽物除去の優先順位を決定する(ステップS55)。
(もっと読む)
移動体動き算出装置

【課題】カメラが設置された移動体について、カメラ画像を用いてその動きを求める技術において、対応点がたとえ大きな誤差を含む場合であっても、精度良く、移動体動きを算出可能にする。
【解決手段】移動体動き算出装置100において、対応点算出部101はカメラ120によって撮影された画像間の対応点を算出する。第1の動き算出部102は画像内に所定の平面を仮定して、対応点を用いて移動体の第1の動きMaを算出する。第2の動き算出部103は第1の動きMaと対応点を用いて、第2の動きMbを算出する。
(もっと読む)
画像データ処理装置
【課題】 複数の画像データの差分を短時間で算出して、両者の相違部分を明確に表示する画像データ処理装置を提供する。
【解決手段】 複数系統の映像信号入力部10と、映像信号入力部10から入力された映像データを画像変換する画像変換手段20と、画像データを記憶する記憶手段60と、画像データどうしをピクセル単位で差分して差分値を算出する差分値算出手段30と、算出された差分値に基づいて、新たな画像を生成する差分画像生成手段40と、画像変換手段20に変換された画像および、差分画像生成手段40により生成された画像をそれぞれ出力する出力手段50とを有することを特徴とする画像データ処理装置100である。
(もっと読む)
非同期カメラ映像を用いた人物位置推定方法及びそのシステム
【課題】カメラにより撮影した画像を利用して空間の人物位置を推定するシステムを安価に構築する。
【解決手段】同一人物を2台以上の非同期カメラで撮影し、参照カメラで撮影された連続する前後フレームを選択し、前後フレームの間の時刻に撮影した基準カメラと基準フレームを選択し、各フレーム画像中の人物領域を推定し、人物領域の各々から人物の頭頂部を推定し、前後フレームおよび基準フレームの各頭頂部の位置情報を用いて人物の3次元的な頭頂部位置を推定する。
(もっと読む)
障害物検知システム
【課題】車速センサや舵角センサの検出誤差に起因する障害物の誤検知を排除し、単眼カメラによる立体物検知をより高精度に行う。
【解決手段】車両に搭載されたカメラで撮像された路面を含む第1の画像の上面図と、前記第1の画像とは異なるタイミングで撮像された第2の画像の上面図とを作成し、上記二枚の上面図を路面上の特徴的形状に基づいて対応させ、上記二枚の上面図の重複部分において差異が生じた領域を障害物と認識する。
(もっと読む)
物体検出装置
【課題】本発明は、二次元情報しか取得でいない場合でも物体の三次元情報(特に、物体までの距離情報)を検出できる物体検出装置を提供することを課題とする。
【解決手段】複数の撮像手段により撮像した各撮像画像に基づくステレオ視により三次元情報を取得する三次元情報取得手段31と、三次元情報を取得した後に三次元情報取得領域の二次元情報を取得する二次元情報取得手段10,11,12,13と、三次元情報を二次元情報を取得するときの視点での視点変換情報に変換する変換手段33と、二次元情報と視点変換情報とを比較し、二次元情報のみに出現している出現物体が存在するか否かを判断する出現物体判断手段33と、出現物体が存在すると判断した場合に三次元情報及び二次元情報に基づいて出現物体の三次元情報を推定する三次元情報推定手段33とを備えることを特徴とする。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】簡単な差分処理で追記部分を確実に抽出する。
【解決手段】原本ドキュメントと追記ドキュメントとの差分処理によって当該追記ドキュメントから追記情報を抽出する画像処理において、原本ドキュメントと追記ドキュメントとを共通の読取装置で読み取ることで、プリンタ・印刷機・スキャナなどの光学系の倍率誤差、紙送りの速度誤差、色再現誤差に起因する位置ずれ・ひずみ・色ずれの影響が原本ドキュメントと追記ドキュメントの双方の画像に同じように発生する。これにより、これら位置ずれ・ひずみ・色ずれの影響を受けることなく、追記ドキュメントの画像データの画素値から原本ドキュメントの画像データの画素値を差し引く簡単な差分処理で追記情報を確実に抽出できる。
(もっと読む)
X線撮像装置及びその方法
【課題】被検体に対する被曝量を低減して少なくとも軟組織を表現する画像を取得すること。
【解決手段】造影無しでX線発生部21とX線検出部22とを回転開始角度位置sから回転させて各撮像角度位置f1、f2、…、fnで各撮像を行って複数の造影無しの二次元画像データA1を取得し、造影有りでX線発生部21とX線検出部22とを回転開始角度位置sに対してずれ角度φ、例えば角度0.5°ずれた回転開始角度位置saから回転させて各撮像角度位置g1、g2、…、gnで各撮像を行って複数の造影有りの二次元画像データA2を取得する。
(もっと読む)
画像歪補正装置
【課題】可視動画像と不可視動画像の歪を実時間補正することのできる画像歪補正装置を提供する。
【解決手段】可視画像Vを取得する可視画像取得手段1と、不可視画像Iを取得する不可視画像取得手段2と、可視画像取得手段1および不可視画像取得手段2の画像取得条件CVおよびCIの関数である可視画像光学歪補正値DVdおよび不可視画像光学歪補正値DIdを記憶する補正値記憶手段3と、可視画像取得手段1および不可視画像取得手段2の画像取得条件CVおよびCIの関数として補正値記憶手段3から読み出される可視画像光学歪補正値DVdおよび不可視画像光学歪補正値DIdに基づいて可視画像Vおよび不可視画像Iの画像歪を補正する画像歪補正手段4とを含む。
(もっと読む)
対象物位置追跡方法、装置、およびプログラム
【課題】類似色物体の誤認識を減らす、認識率を高めた対象物位置追跡方法を提供する。
【解決手段】肌色確率分布計算部14は撮像部11で撮像された各フレームの撮像画像を入力し、肌色が存在する確率の計算式または、画素値と該確率との関係を表わすルックアップテーブルを用いて、指定された矩形領域内での肌色の確率分布を計算する。矩形領域決定部15は、確率分布の重心を中心とし、確率分布値の総和と確率分布の最大値の関数で幅と高さが与えられる矩形領域を決定する。肌色領域判定部16は前ループで決定された矩形領域と今回決定された矩形領域との大きさの差分が閾値以内、または同一フレームに対し指定ループ回数以上の矩形領域の決定を行った、または矩形領域の大きさが指定サイズを超えた場合に、その矩形領域を現フレームでの前記部位の追跡結果とし、次フレームの計算に移る。
(もっと読む)
顔検出装置および方法並びにプログラム
【課題】特定の情報が付与されていない画像についても、顔検出の処理時間を短縮する。
【解決手段】顔検出部28が、画像上において顔検出のための探索角度、探索サイズおよび探索位置を種々変更しつつ、画像から顔を検出する。1つめの顔を検出した場合、探索角度を、検出した顔の角度を基準とした所定角度範囲に制限して、および/または探索サイズを、検出した顔のサイズを基準とした所定サイズ範囲に制限して以降の顔の検出を行うよう、顔検出制御部30が顔検出部28を制御する。
(もっと読む)
画像処理による侵入者検知装置
【課題】監視カメラの画像を用いて重要な施設や道路等の立ち入り禁止箇所への侵入者及び境界線付近を徘徊する不審者等を検知する侵入者検知装置を提供する。
【解決手段】侵入禁止区域及びその周辺部を撮像する監視カメラ1が撮像したカメラ画像を、カメラ画像中の移動物体を動き塊として検出するとともに、カメラ画像中に侵入禁止区域と他区域とを隔す侵入禁止線を設定する侵入禁止線設定手段209と、侵入禁止線を包囲する所定の領域である侵入禁止線検査範囲を設定し、侵入禁止線検査範囲内の侵入禁止区域側に存在する動き塊を侵入した移動物体、侵入禁止線検査範囲内の他区域側に存在する動き塊を接近した移動物体として検出する侵入禁止線検査手段210と、侵入した移動物体を侵入者、接近した移動物体を不審者として検知する侵入者検知手段211とを備えた画像処理部2において解析する構成とした。
(もっと読む)
半田ペースト印刷検査方法
【課題】本発明は、半田ペーストブリッジが検出可能な画像処理方法を提供することを目的とする。
【解決手段】上記目的を達成するために、本発明の画像処理方法は、CCDカメラで撮像した半田ペーストが印刷される前のプリント基板の画像から白色の輝度を黒色の輝度に変換しさらに画像全体を反転させた画像と印刷後のプリント基板の画像を反転させた画像を重ね合わせることで電極パッド間の半田ペーストの検出を可能としたことを特徴とする。本発明の半田ペーストブリッジ検出方法を用いれば、容易に印刷不良の特定が可能となる。
(もっと読む)
複数カメラ撮影画像処理方法及び装置
【課題】複数設置した車外撮影カメラの画像を合成処理し、車両上方に設置した1つのカメラで撮影した画像のように表示する際、車両近辺の立体物を見やすく表示することができる複数カメラ撮影画像処理方法及び装置とする。
【解決手段】車両上方視点画像処理部9では、車外を撮影する複数のカメラ2、3、4、5の撮影画像を取り込んで車両上方を視点とした画像を合成処理し、画像内輝度・色差判別部11では前記画像合成処理した画像内において、輝度・色差等により他とは異なる画像表示変化部分の検出を行い、更に立体物検出部12では画像内輝度・色差相違物が連続的に変化するときそれを立体物とする。検出した立体物は標準表示、或いは2視点による立体物表示処理を行う。この立体物表示画像は、画像接続合成部15で車両上方視点画像に対して、立体物の基部前端部分で接続して表示する。
(もっと読む)
対象物が表現された画像の数の算出
【課題】各対象物が画像内に被写体として表現されているか否かを容易に確認することのできる技術を提供する。
【解決手段】画像処理装置は、複数の対象物に対応する複数の基準特徴データを記憶するための記憶部と、画像毎に、画像内に表現された被写体の特徴データを生成する特徴データ生成部と、特徴データ毎に、特徴データと複数の基準特徴データとを用いて被写体が複数の対象物のうちのいずれであるかを特定するための被写体特定部と、特定結果に応じて、対象物毎に、対象物が被写体として表現された対象物画像の数を算出する算出部と、を備える。
(もっと読む)
超音波診断装置およびその画像処理方法、その画像処理プログラム
【課題】超音波の画像から抽出された特徴点を用いたトラッキング(追跡演算)の精度を向上させることができるようにする。
【解決手段】本発明の超音波診断装置1においては、演算部26の特徴点抽出部33は、データ記憶部25に記憶されている異なる生成条件で生成された複数の画像データに基づいて候補となる特徴点を抽出し、追跡可能特徴点設定部34は、特徴点抽出部33から供給された抽出結果に基づいて追跡可能な特徴点を設定し、追跡演算部35は、追跡可能特徴点設定部34により設定された追跡可能特徴点を用いて、データ記憶部25に記憶されている画像データに基づいて追跡演算を行う。物理パラメータ算出部36は、追跡演算部35から供給された追跡演算結果に基づいて被検体の診断部位における各種パラメータを算出し、その算出結果をデータ記憶部25に供給する。
(もっと読む)
印刷物検査装置、印刷物検査方法、印刷装置、印刷方法、プログラム、記録媒体
【課題】共通データと可変データとが印刷された印刷物を迅速かつ効率的に検査することを可能とする印刷物検査装置及び印刷装置等を提供する。
【解決手段】検査装置3は、撮像部25により、良否判定の基準となる印刷物17を撮像して基準画像31を取得してメモリ23に保持する。検査装置3は、可変データ43のアドレス情報39を取得してメモリ23に保持する。検査装置3は、撮像部25により、印刷処理した印刷物17を撮像して検査画像33を取得する。検査装置3は、全領域45からアドレス情報39に対応する領域(可変領域49)を除外して共通領域47を算出する。検査装置3は、共通領域47について、基準画像31と検査画像33とを比較処理し、共通領域比較情報35を算出する。検査装置3は、共通領域比較情報35に基づいて印刷物17の良否判定を行う。
(もっと読む)
欠陥観察方法及びその装置
【課題】
半導体ウェハ等の試料上に存在する欠陥の画像を自動収集かつ自動分類する装置において,ユーザの要求によりその分類クラスが多数になる場合や,またその基準が高頻度で変更される場合でも,容易に対応可能な分類システムを提供する。
【解決手段】
ユーザが分類クラスを定義する際に,各分類クラスが持つ属性を指定する仕組みを設ける。分類システムは各クラスが持つ属性を基に,内部のルール分類器と教示分類器との結合形態を自動変更し,ユーザの分類基準に合わせた分類システムを自動構築する。
(もっと読む)
画像処理により細胞運動特性を評価する方法、そのための画像処理装置及び画像処理プログラム
【課題】 細胞運動特性を迅速かつ効率的に評価し、試薬の投与等の条件による細胞の状況を確認できるようにする。
【解決手段】 培養環境下にある細胞について、第1の時点と、それより一定時間だけ後の第2の時点とにおける位相差画像に画像処理を行って第1、第2の細胞抽出画像を形成し、両画像の差分をとった差分画像を形成し、差分画像において前後の時点での細胞の重心の移動方向を検出し、それよりその方向を基準方向として求め、基準方向に対して細胞の重心位置から角度φの方向における差分画像中での画素値の変化量を360°にわたって所定の角度毎に求めることにより1つの細胞部分の変化量を求め、この変化量を同じ条件でN個の細胞について求め、角度φの方向における細胞の画素値の変化量をN個の細胞について平均した値を各角度φ毎に求め、360°の範囲にわたる角度φに応じた細胞の画素値の変化量を細胞の運動特性を示すものとして表示する。
(もっと読む)
撮像装置、再生装置、プログラム、および記憶媒体
【課題】 動画から特定の人物が写っているコマを検出してそのコマの静止画像を出力する、撮像装置、再生装置、プログラム、および記憶媒体の提供
【解決手段】 動画再生時に、前処理として各コマの顔データを検出し、顔情報を構成する。顔データの検出処理が終了してから、人物51を指定若しくは選択するとその人物の顔の特徴データが抽出され内蔵メモリに保持される。次に、再度動画が再生され、顔情報を基に人物が写っているコマの人物の顔の特徴データを抽出して内蔵メモリ保持されている比較用の人物51の顔の特徴データと順次比較し、類似度が閾値より高い人物が写っているコマが特定人物51が写っているコマと判定してそのコマの画像データを順次表示し、出力する。
(もっと読む)
2,021 - 2,040 / 2,719
[ Back to top ]