
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
21 - 40 / 2,719
画像処理装置
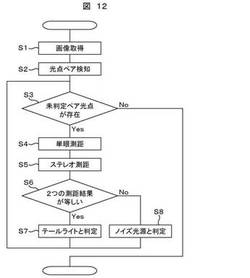
【課題】ステレオカメラから得られた情報をもとに、夜間のさまざまな光点の中から、対向車のヘッドライトや先行車のテールライトのみを抽出し、ドライバーにとってより安全な視界を提供する。
【解決手段】第1の撮像素子と第2の撮像素子で撮像した2つの画像から検知対象物候補までの第1の距離情報を算出する第1の距離情報算出手段と、第1の撮像素子で撮像した画像から検知対象物候補までの第2の距離情報を算出する第2の距離情報算出手段と、第1の距離情報と第2の距離情報を比較し、比較した比較結果に基づいて検知対象物候補から対象物を検知する対象物検知手段と、を有する。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム

【課題】多視点からの画像データを用いて、リフォーカス処理と高解像度化処理とを同時に行う場合、どの視点から見ても被写体上の同一の点は同じ輝度(色)に見えている必要がある。また、被写体が仮想的なピントを合わせる面上に存在する必要がある。そのため、上記条件から逸脱している場合、画質劣化が生じる。
【解決手段】仮想撮像系が合焦する面の情報と複数の視点の配置の情報とから、前記複数の画像データの画素が前記仮想撮像系の画像上のどの位置に配置されるかを表す画素配置パラメータを算出し、画素配置パラメータから前記複数の画像データ間の前記仮想撮像系の画像上での画素値の整合度を算出する。そして、整合度から前記仮想撮像系の画像上での画素位置の近傍にある画素の画素補間パラメータを算出し、前記配置パラメータと前記画素補間パラメータとを用いて、前記複数の画像から画像合成を行う。
(もっと読む)
画像処理装置、画像処理方法、および記録媒体
【課題】簡単に、多重露光による画像を得ることができるようにする。
【解決手段】画像合成部は、入力画像に含まれる被写体の領域を含む画素の加算を行う合成処理を行い、入力画像の被写体を検出する被写体検出部における検出結果に基づいて、合成処理を終了する。本技術は、例えば、多重露光撮影の画像処理を行う画像処理装置に適用できる。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理システム
【課題】蓄積する加筆内容の画像をデータサイズの低減を図りながら、複数の差分データを合成する場合に、複数の加筆内容が重複しないようにする。
【解決手段】本発明は、複数の媒体のそれぞれの元の画像を蓄積する画像データ蓄積手段と、加筆された各媒体の画像を入力する入力手段と、入力された加筆された媒体の画像と当該媒体の元の画像とに基づいて、差分を抽出する抽出手段と、抽出された差分の構成情報を、元の画像に対応付けて管理する情報管理手段と、元の画像に対応付けられている複数の差分の構成情報に基づいて、当該元の画像において複数の差分が互いに重複するか否かを判定する重複判定手段と、重複判定手段により複数の差分が重複すると判定した場合に、重複している差分の構成情報を再構成する再構成手段とを備えることを特徴とする。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】発光源が点灯したときの絶対的な輝度を利用して、発光源の点灯有無を高精度に判断する。
【解決手段】車外環境認識装置は、車外環境の明るさに応じた第1露光態様で第1画像を取得すると共に、発光源が自発光しているか否かを判別可能な、露光時間が第1露光態様と異なる第2露光態様で第2画像を取得し、第1画像に基づき検出領域内で先行する車両が占有する車両領域を特定し、第2画像の輝度に基づいて発光源の位置を特定し、車両領域と発光源の位置とを対応付ける(S316)。
(もっと読む)
棒状ワーク撮像装置および棒状ワークの先端同心判定装置
【課題】測定時間を短縮できると共に、高い精度で棒状ワークを管理できる棒状ワーク撮像装置および棒状ワークの先端同心判定装置を提供する。
【解決手段】鏡筒13にビームスプリッター42、43を設け、対物レンズ41からの像光を3つの光路P1〜P3に分光し、各光路P1〜P3の像光を拡大して、カメラ14、15、16で撮像する。ビームスプリッター42、43の光軸の中心位置をずらすことで、鏡筒13に連なるカメラ14で先端加工部21を撮像し、カメラ15で本体ストレート部23の一方の輪郭を撮像し、カメラ16で本体ストレート部23の他方の輪郭を撮像する。これらカメラ14、15、16の撮像信号を解析し、先端加工部21の軸心の位置と本体ストレート部23の軸心の位置とが合致するかどうかにより、棒状ワーク10の良否を判定する。
(もっと読む)
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
画像処理装置および画像処理方法
【課題】三次元空間にある被写体の表面形状を曲面パッチを用いて推定することで、特に曲面部分についての推定精度を向上させる。
【解決手段】被写体の多視点画像とそのカメラ位置情報を入力し、特徴点抽出部805で各画像における特徴点を抽出する。そして、特徴点三次元パッチ作成部806で、各画像の特徴点に対応する、曲面からなる特徴点三次元パッチを作成し、さらにパッチ追加部807で、特徴点三次元パッチ周辺に、曲面からなる追加三次元パッチを作成する。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】対象物体までの距離を測定する際に、距離精度を向上させ、従来より遠い距離の対象物でも正確な距離を測定することができる画像処理装置及び画像処理方法を得ること。
【解決手段】一対の撮像素子で同時刻に同方向を撮像した一対の画像の一方の画像から対象物の画像を含む一方画像対象物領域302を抽出する。そして、一方画像対象物領域302を構成する複数の画像構成部分についてそれぞれ対象物画像構成部分304と背景画像構成部分303のいずれであるかの確度である背景度を算出する。そして、背景度を用いて他方の画像501内から一方画像対象物領域302と類似した画像を有する他方画像対象物領域503を抽出して、一方画像対象物領域302と他方画像対象物領域503との視差を算出する。
(もっと読む)
物体認識システム及び物体認識装置
【課題】ラインセンサ等の撮像装置を用いて取得した物体の撮像データを用いてその物体を認識する物体認識システムにおいて、物体の通過速度によって撮像データに含まれる物体の画像が歪むため対象物のテンプレートデータとのマッチングの精度が低下し物体の認識精度が低下するという課題があった。
【解決手段】物体認識部34は、速度検出部32で検出された物体の速度に応じて、撮像装置1、2で取得された撮像データに含まれる物体の画像をサイズ変更し、その変更後の撮像データとテンプレートデータとをマッチングして物体を認識するので、精度高く物体認識ができる。
(もっと読む)
情報処理装置、及び、情報処理方法
【課題】効率的に動領域抽出処理を行う動領域抽出プロセッサを提供する。
【解決手段】 動領域抽出プロセッサ5は、領域毎のアフィン動きモデルを推定する動きモデル推定処理と、領域を表すラベルを画素に割り当てる領域ラベリング処理との間の連携を強化し、境界更新処理と新領域検出処理の択一化により画素単位のパイプライン処理を実現し、要素処理(輝度勾配の算出など)の共通化と簡単化を行うことによって、比較例と比較して、アーキテクチャの50%削減、及び、4.2倍のスループットを実現している。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
画像処理装置、表示装置、画像処理方法及び画像処理プログラム
【課題】色相のずれを軽減しつつ視野闘争を軽減したアナグリフ画像を生成する。
【解決手段】画像に含まれる画素毎に、第1の色成分の画素値と該第1の色成分以外の他の色成分のうち少なくとも一方の画素値との差を変更し、かつ他の色成分同士の画素値の差を変更する画素値変換部を備える。前記画素値変換部には差分算出部を備え、前記画素値変換部は、各画素において、前記差分算出部が算出した差分に基づいて、前記第1の色成分の画素値と前記他の色成分の画素値の差及び前記他の色成分同士の画素値の差を小さくする。
(もっと読む)
撮像装置及び撮像方法
【課題】簡易な装置で被写体の移動速度を測定することができる撮像装置及び撮像方法を提供すること。
【解決手段】第1の被写体までの距離を、該第1の被写体の大きさに基づいて算出する測距手段と、移動している第2の被写体を所定の時間間隔で連続撮影して複数の静止画像を生成する静止画像生成手段と、前記複数の静止画像のそれぞれから、前記第2の被写体の当該静止画像内における位置を検出する位置検出手段と、前記第1の被写体までの距離、前記複数の静止画像のそれぞれで検出された前記第2の被写体の位置の差、及び前記所定の時間間隔に基づいて、前記第2の被写体の移動速度を算出する算出手段と、を備えることを特徴とする。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】360度のパノラマ画像を生成する場合に、高品質なパノラマ画像が得られるようにする。
【解決手段】投影画像生成部は、カメラを360度回転させながら撮影された撮影画像を円筒面上にマッピングすることで、投影画像を生成する。差分累積値算出部は、隣接する投影画像間の各位置における差分累積値を算出し、有向グラフ生成部は、投影画像と差分累積値とに基づいて、差分累積値がエッジのエネルギに反映された有向グラフを生成する。経路探索部は、有向グラフに基づいて、各投影画像を接続してパノラマ画像を生成するときに最も破綻が少ない投影画像の接続位置を検索し、パノラマ画像生成部は、その検索結果に基づいて投影画像を接続し、パノラマ画像を生成する。本技術は、画像処理装置に適用することができる。
(もっと読む)
メイクアップシミュレーションシステム
【課題】動画像に含まれるユーザの顔を少ない処理負担で正確にメイクアップできるメイクアップシミュレーションシステムを提供することを目的とする。
【解決手段】メイクアップシミュレーションシステムであって、撮影した動画像を出力する撮影手段2と、出力された動画像を画像処理して出力する制御手段8と、制御手段8から出力された動画像を表示する表示手段7とを備え、制御手段8は動画像からユーザの顔を所定のトラッキングポイントに基づいて認識する顔認識処理手段と、トラッキングポイントに基づいて動画像に含まれるユーザの顔に所定のメイクアップを施して表示手段に出力するメイクアップ処理手段とを備えることにより上記課題を解決する。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム
【課題】時間的、空間的な連続性を保ちつつ、誤検出を低減しながらも個人が特定できないようにして人物領域を検出する。
【解決手段】処理対象画像と、直前の処理により生成された背景画像と、分散値画像に基づき、背景画像と処理対象画像の各画素値を分散値画像に応じた重み付け和により背景画像を更新するステップと、処理対象画像に対して荷重平均フィルタを使用し低周波数成分画像を生成するステップと、処理対象画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と処理対象画像との差異から人物領域候補を算出するステップと、高周波数成分画像の各画素の値を算出された人物領域候補の各画素の値を用いて抑制するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成し結果画像を生成するステップと、結果画像を処理結果として出力するステップとを有する。
(もっと読む)
21 - 40 / 2,719
[ Back to top ]