
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
221 - 240 / 2,719
画像処理装置、画像処理方法、及びプログラム
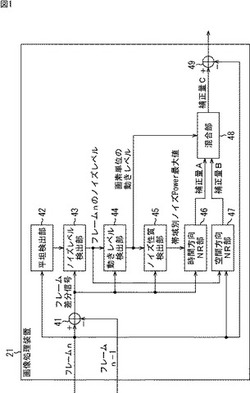
【課題】画像上の動き領域又は静止領域の少なくとも一方を精度良く検出する。
【解決手段】平坦検出部は、入力された第1の画像を構成する各画素の画素値の分散に基づいて、第1の画像上の平坦領域を検出し、差分算出部は、第1の画像と、第1の画像の前又は後に連続する第2の画像との対応する画素の画素値どうしの差分を算出し、ノイズレベル検出部は、第1の画像上の平坦領域を構成する各画素に対応する差分の分散に基づいて、ノイズレベルを検出し、動きレベル検出部は、第1の画像を構成する各画素に対応する差分の分散とノイズレベルとの比較結果に基づいて、第1の画像上の静止領域又は動き領域の少なくとも一方を検出する。本開示は、例えば、画像を処理する画像処理装置に適用できる。
(もっと読む)
処理強度決定装置、撮像装置およびプログラム

【課題】手間をかけることなく好ましい顔画像を生成すること。
【解決手段】処理強度決定装置は、人物が撮影された画像の画像データを取得する画像データ取得部と、人物の顔の凸部が撮影された第1画像領域の輝度と、当該人物の顔の凹部が撮影された第2画像領域の輝度とを比較する比較部と、比較部による比較結果に基づいて、画像データに対して人物の顔の凹凸を強調または抑制する画像処理の処理強度を決定する強度決定部とを備える。
(もっと読む)
画像処理プログラム、画像処理方法、画像処理装置、撮像装置
【課題】複数枚の画像間に生じた揺らぎに対してロバストな超解像処理を実現する。
【解決手段】本発明の画像処理プログラムは、位置ずれを含む複数枚の画像から、それら画像の各々よりも解像度の高い合成画像を生成する画像処理方法であって、前記複数枚の画像の各々を周波数分解し、複数階層の空間周波数成分を画像毎に生成する分解ステップ(S43)と、前記分解ステップにより画像毎に生成された複数階層の空間周波数成分を、階層毎に画像間で平均化し、階層毎の平均空間周波数成分を生成する平均化ステップ(S48)と、前記平均化ステップにより生成された前記階層毎の平均空間周波数成分を合成し、合成画像を生成する合成ステップ(S411)とを含む。
(もっと読む)
電子カメラ
【構成】光学/撮像系12Lは、左側視野を捉える撮像面を有してL側生画像データを出力する。また、光学/撮像系12Rは、右側視野を捉える撮像面を有してR側生画像データを出力する。ここで、左側視野および右側視野は共通視野を部分的に含む。また、共通視野において、R側生画像データのS/N比はL側生画像データのS/N比よりも低く、R側生画像データの解像感はL側生画像データの解像感よりも高い。信号処理回路14LはL側生画像データに基づいてYUV形式のL側画像データを作成し、信号処理回路14RはR側生画像データに基づいてYUV形式のR側画像データを作成する。画像合成回路24は、こうして作成されたL側画像データおよびR側画像データを共通視野を基準として合成する。
【効果】合成画像の作成に要する時間の短縮化と合成画像の品質の向上とが図られる。
(もっと読む)
走行支援装置及び走行支援方法
【課題】撮像手段の数を増加させる必要が無く、且つ、移動体の真後ろの二輪車について検出することが可能な走行支援装置及び走行支援方法を提供する。
【解決手段】視点変換部31は、カメラ10による撮像にて得られた画像を鳥瞰視される状態へ視点変換し、位置合わせ部32aは、視点変換された異なる時刻の、一方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第1の所定領域A1の画像と、他方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第2の所定領域A2の画像とについて、それぞれ個別に位置を合わせる。差分値検出部32bは、位置合わせされた異なる時刻の第1の所定領域A1及び第2の所定領域A2の画像データそれぞれの差分値を検出する。後続車両検出部33aは、検出された第1の所定領域A1の差分値と第2の所定領域A2の差分値との隔たりから後続の二輪車を検出する。
(もっと読む)
走行支援装置
【課題】特殊な照明装置を追加するといったコストアップを招くことなく、周期環境が暗い状況であっても障害物の検出精度の向上を図る。
【解決手段】光源検出部12は、光源対象領域Rdにおいて後続車両のヘッドライト(光源)に相当する面積を光源面積として算出する。そして、閾値算出部14は、算出した光源面積に応じて、後続車両検出部15において利用される差分法の閾値を設定する。この場合、後続車両検出部15は、撮像画像Ipにおいて検出領域R1,R2を設定し、評価パラメータである差分法の閾値に基づいて撮像画像を評価することにより、検出領域R1,R2内における障害物(併走車両)を検出する。
(もっと読む)
欠陥分類方法及び欠陥分類システム
【課題】自動欠陥分類機能では、装置毎に適切な処理パラメータが異なるが同一の工程において複数の装置が運用される場合でも、それぞれの分類レシピにおける分類クラスに差が発生しないようにする。
【解決手段】同一の工程で異なる画像撮像装置から得られた画像から同種の欠陥画像を特定する対応欠陥特定部209、同一の工程で異なる画像撮像装置から得られた画像を変換し、比較可能な類似した画像に変換する画像変換部212、同一の工程の分類レシピについて、同一の分類クラスを定義し、特定された同種の欠陥画像をそれぞれの対応する分類レシピ内の分類クラスに登録するレシピ更新部211を備えた。
(もっと読む)
相対カラー品質の自然言語評価システム及び方法
【課題】基準及びソース・イメージの間の相対カラー品質の客観的評価の自然言語を提供する。
【解決手段】カラー変換器110が基準イメージ及びソース・イメージの間の差測定値を受け、差測定値に基づいてカラー・アトリビュート変化を求める。カラー・アトリビュートは、例えば、色相シフト、彩度変化、カラー多様性を含む。マグニチュード・インデックス・ファシリティ120は、求めたカラー・アトリビュート変化のマグニチュードを求める。自然言語選択器130は、カラー・アトリビュート変化及びこの変化のマグニチュードを自然言語に割り当て、カラー・アトリビュート変化及びこの変化のマグニチュードのレポートを行う。出力は、テキスト又はオーディオ形式若しくはテキスト及びオーディオ形式の両方にてユーザに伝達される。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】画像のノイズを低減させるために、正確にノイズを計測することができるようにする。
【解決手段】第n−1番目のフレームの画像に対して時間加算ノイズ低減処理が施された画像をNR画面とし、NR画面に対する動き補償が行われ、入力された画像のデータにおいて第n番目のフレームの画像を入力画面とし、入力画面の画素値と動き補償されたNR画面の画素値から得られる所定の値を、時間加算ノイズ低減処理における巡回履歴に基づいて補正することで、入力画面のノイズが計測され、計測されたノイズに対応する加算比率が決定され、決定された加算比率に応じて定まる係数を乗じることにより、入力画面の画素値および動き補償されたNR画面において対応する画素値とを重み付け加算することで、入力画面に前記時間加算ノイズ低減処理が施される。
(もっと読む)
フィルタリング処理回路とそれを有するマッチング回路
【課題】簡単な回路構成で高速にフィルタリング処理を行う。
【解決手段】異なる視点での2つの画像に対する複数のずれ量に対応する差分絶対値和のうち,最小差分絶対値和を抽出するフィルタリング処理回路であって,入力回路に入力される複数のずれ量にそれぞれ対応する複数の差分絶対値和が当該入力時点までで最小の差分絶対値和の場合に最小の差分絶対値和として保持する最小差分絶対値和保持回路と,次に小さい第2最小差分絶対値和を検出して保持する第2最小差分絶対値和検出回路と,入力時点までで最小の差分絶対値和でない場合には,当該入力差分絶対値和を第2最小差分絶対値和検出回路に入力し,最小の差分絶対値和である場合には,最小差分絶対値和保持回路で最小差分絶対値が更新されることに伴って最小差分絶対値和保持回路から出力される元の最小差分絶対値和を,第2最小差分絶対値和検出回路に入力するセレクタ回路とを有する。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法
【課題】簡単な操作で種々の画像を表示することが可能な情報処理技術を提供する。
【解決手段】ゲーム装置は、実空間に配置されたマーカを撮像する。ゲーム装置は、撮像した画像に含まれるマーカに基づいて、ゲーム装置を基準としたマーカの位置および姿勢を算出するとともに、マーカ上にマーカ座標系を設定する。また、ゲーム装置は、ゲーム装置が備える加速度センサが検出した加速度に基づいて、重力方向を検出する。次に、ゲーム装置は、検出した重力方向に基づいて、マーカ座標系の重力方向を算出し、算出したマーカ座標系の重力方向に基づいて、仮想キャラクタの姿勢を決定する。そして、ゲーム装置は、当該仮想キャラクタを表示装置に表示する。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
画像信号処理装置及び画像信号処理方法
【課題】
明暗差が大きくかつ動き成分がある入力画像を鮮明な出力画像に変え得る画像信号処理技術を提供する。
【解決手段】
画像信号処理装置を、複数フレームの入力画像信号から該複数フレーム間の画像の動き成分を算出するとともに、該複数フレームの入力画像信号に基づいて画像のエッジ成分を算出し、該算出した動き成分とエッジ成分とに応じて、現在入力中のフレームの入力画像信号を信号処理し、該フレームの出力画像信号による画像が、ノイズ除去されかつコントラスト補正されたものとなるようにした構成とする。
(もっと読む)
画像処理装置およびその方法
【課題】 分割撮影した画像を結合する場合に、結合画像の全体における照明むらを低減し、画像の間の重複領域における不自然なつなぎ目を抑制する。
【解決手段】 入力部302は、同一照明下において、被写体を分割撮影した複数の画像データ、および、補正用チャートを撮影した補正用の画像データを入力する。むら補正部303は、補正用の画像データから、複数の画像データの輝度むらを補正するための補正係数を算出し、補正係数により複数の画像データの輝度むらを補正する。制御部306は、分割撮影に用いた撮影装置が複数の画像データそれぞれを撮影した際の撮影方向を示す情報を取得する。画像射影部305は、撮影方向を示す情報に基づき、輝度むらを補正した複数の画像データを結合して、被写体の全体の画像を表す画像データを生成する。
(もっと読む)
医用画像表示装置及び医用画像保管システム
【課題】医用画像データの画質の劣化を防止し、保存データ領域の増大を抑制しつつ、アノテーションデータをDICOM規格に準拠したデータに変換すること。
【解決手段】記憶部2は、DICOM規格に準拠した医用画像データと医用画像データに関連付けられDICOM規格に準拠していないアノテーションデータとを記憶する。表示部3は、医用画像データに対応する医用画像とアノテーションデータに対応するアノテーションとの重ね合わせ画像を表示する。抽出部4は、重ね合わせ画像から特定のカラー値を有する画素領域を抽出する。変換部5は、抽出された画素領域に対応する画像データをDICOM規格に準拠したアノテーションデータに変換する。保存部6は、DICOM規格に準拠したアノテーションデータを医用画像データに関連付けて保存する。
(もっと読む)
運転支援装置
【課題】運転支援装置において、オプティカルフロー検出等の画像処理機能を向上することにある。
【解決手段】画像処理手段(5)は、広角レンズ(3)を有する撮像手段(4)により撮像される画像上の各画素の座標に対応するイメージプレーン上の各画素の座標を記録した記録手段(8)と、撮像手段(4)により撮像された画像上の画素位置から記録手段(8)に記録された座標の対応関係に基づいてイメージプレーン上の画素位置を取得する画素位置取得手段(9)とを備える。
(もっと読む)
画像処理装置
【課題】操作者の負担を軽減することができる画像処理装置を提供する。
【解決手段】被検体P内の撮像によりカプセル内視鏡10で生成された画像データを処理する画像処理部50をフレーム毎に表示する表示エリア71を有する表示部70を備え、画像処理部50は、mフレームの画像データの内、nフレーム目の画像データに含まれる閾値以下の画素値を有する領域を検出する。次いで、検出した穴領域が基準位置と重なる位置へnフレーム目の画像データを移動して表示エリア71に表示する位置を調整する。更に穴領域の面積を求め、求めた穴面積が基準面積と同じ面積になるようにnフレーム目の画像データを拡大又は縮小して表示エリア71に表示するサイズを調整する。
(もっと読む)
置き去り又は持ち去り検知システム
【課題】置き去り又は持ち去り検知システムにおいて、置き去り又は持ち去り者の検索のための対象画像を短い映像として提供する。
【解決手段】監視領域の画像を撮影する監視カメラ20と、撮影した画像を保存するレコーダー32と、置き去り又は持ち去り判断部103と、レコーダー32に保存された画像から出力画像を切りだす出力画像作成部106と、出力画像を表示するモニター30とを有し、前記判断部103が置き去り又は持ち去りがあったと判断したとき、切り出し範囲作成部105は、前記異物の位置を含む所定の範囲内の位置と、前記置き去り又は持ち去り発生時刻を含む所定の期間に基づき切り出し範囲を作成し、前記出力画像作成部106は作成した範囲に基づき前記レコーダー32に保存された画像から画像を切り出す。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】マルチフレーム合成による画質の低下の発生を未然に防止することのできる画像処理装置、画像処理方法およびプログラムを得る。
【解決手段】主制御部20により、各々異なる2つの視点からそれぞれ連続的に撮影された複数の画像を取得し、取得した複数の画像から前記視点毎に基準画像を決定し、当該基準画像を基準として前記複数の画像を当該視点毎に合成する一方、前記視点毎の基準画像間の対応点に関する第1立体画像関連情報と、合成した前記視点毎の合成画像間の対応点に関する第2立体画像関連情報との関係が、前記基準画像のほうが前記合成画像より立体視に適していることを示すものとして予め定められた条件を満足する場合に前記基準画像を前記視点毎に記録し、前記条件を満足しない場合に前記合成画像を前記視点毎に記録する。
(もっと読む)
X線CT装置及び画像処理方法
【課題】病変部と周辺部位との関係性を示す情報を提示すること。
【解決手段】実施形態のX線CT装置は、特定部と、移動情報算出部と、相対関係算出部とを有する。特定部は、時相の異なる被検体内の画像データから、病変部の位置と該病変部の周辺に位置する周辺部位の位置とを特定する。移動情報算出部は、前記特定部によって特定された病変部及び周辺部位の位置に基づいて、病変部及び周辺部位の移動に関する移動情報を算出する。相対関係算出部は、前記移動情報算出部によって算出された前記病変部の移動情報と前記周辺部位の移動情報との相対関係を算出する。
(もっと読む)
221 - 240 / 2,719
[ Back to top ]