
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
281 - 300 / 2,719
車両検出装置
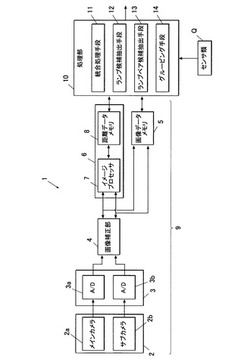
【課題】検出した物体の位置データを的確にグループ化して先行車両等の車両を的確に検出することが可能な車両検出装置を提供する。
【解決手段】車両検出装置1は、画像T上で、統合処理手段11が画像中の画素を抽出して統合した各画素領域gの中から車両のテールランプTLに対応する可能性がある画素領域gをランプ候補gLとして抽出するランプ候補抽出手段12と、位置検出手段9が検出した位置データをグループ化して生成した各グループGについて、ランプ候補gLを含むグループGL同士を再グルーピングした後で、全てのグループG同士を再グルーピングするグルーピング手段14とを備え、再グルーピング処理では、ランプ候補gLを含むグループGL同士の再グルーピングを行う際の閾値Δdp等が、その後の全てのグループG同士の再グルーピングを行う際の閾値Δdp*等よりも、再グルーピングし易い閾値とされている。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム

【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】非均等速度で移動する物体を含む動画像に対して、多重像を抑制してフレームレート変換処理ができるようにする。
【解決手段】動画像信号の撮影情報からシャッタースピード、撮像フレームレート及び表示フレームレートの情報を取得し、フレーム変換に必要な枚数のフレーム画像を取得する。そして、取得した複数のフレーム画像での被写体の動きベクトルを算出し、前記算出した動きベクトルからフレーム画像ごとに前記被写体の動き距離、動きスピードを算出する。次に、複数のフレーム画像に対して、前記シャッタースピード及び動きスピードに基づく第1のフィルタ処理と、前記動き距離に基づく第2のフィルタ処理とを適用する。
(もっと読む)
並走体検出装置及び並走体検出方法
【課題】並走体の位置検出精度について向上を図ることが可能な並走体検出装置及び方法を提供する。
【解決手段】並走体検出装置1は、カメラ10にて得られた自車両Vの後側方側の異なる時刻の検出領域の画像を、鳥瞰視上で位置を合わせると共に、位置合わせされた異なる時刻の画像データの差分画像データに基づいて、並走体と地面との境界となる接地線を検出する計算機50を備えている。また、計算機50は、差分画像データに対して自車両Vの移動方向と略平行な複数の線をそれぞれ異なる位置に設定し、差分画像データのうち、設定した略平行な複数の線それぞれの自車両Vの遠方側におけるデータに対し、検出領域の画像を鳥瞰視に視点変換した際に並走体が倒れ込む方向に沿って、所定の差分を示す画素数をカウントして度数分布化することで複数の差分波形を生成し、生成した複数の差分波形の形状変化から並走体の接地線を検出する。
(もっと読む)
間引きフィルタ及びプログラム
【課題】入力画像信号の局所的な特徴に応じて、復元に適した間引きフィルタ処理を実現する。
【解決手段】帯域判定手段10の判定手段13は、ブロックBk毎に、差分画像D(t,x,y)の画素値の合計Gを評価値として計算し、評価値Gが閾値θ以下である場合、「狭帯域」の帯域判定結果Jkを出力し、評価値Gが閾値θ以下でない場合、「広帯域」の帯域判定結果Jkを出力する。フィルタ設定手段20は、「狭帯域」の帯域判定結果JkのブロックBk(例えば、静止画像の領域)について、狭帯域のフィルタを設定し、「広帯域」の帯域判定結果JkのブロックBk(例えば、動画像の領域)について、広帯域のフィルタを設定する。これにより、局所的にフィルタを変化させることができるから、復元に適した間引き処理を実現でき、簡易な差分演算にてフィルタを設定できるから、高速実行が可能となる。
(もっと読む)
画像処理方法、画像処理装置および表示装置
【課題】より高い精度で立体視画像の視差を推定する。
【解決手段】画像処理方法は、第1の画像の1または複数の画素である第1の画素と、第2の画像において上記第1の画素群に対応する位置にある1または複数の画素である第2の画素とについて、上記第1の画像と上記第2の画像との間のバックマッチングによって第1の指標値を算出するステップ(ステップS103)と、上記第1の画素と上記第2の画素との間の相関性を示す相関性指標値を、上記第1の画素によって示される画像の複雑度を示す複雑度指標値を用いて正規化することによって第2の指標値を算出するステップ(ステップS105)と、上記第1の指標値と上記第2の指標値とをかけ合わせることによって第3の指標値を算出するステップ(ステップS107)とを含む。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、および撮影装置
【課題】ハードウェア規模の大幅な増大を招くことなく、ダイナミックレンジが改善されていて且つ劣化が少ないより自然な画像を得ること。
【解決手段】画像処理部300は、同一被写体を撮影して得られた異なる露光量の複数の入力画像中から基準画像を設定し、この基準画像から階調変換特性を導出する階調変換特性導出部310と、基準画像以外の非基準画像の露光量と基準画像の露光量とに基づいて基準画像の明るさを補正した補正画像を生成する正規化部410と、補正画像と非基準画像との間の位置ずれ量を算出して位置ずれ量に基づいて非基準画像を基準画像に位置合せした位置合せ画像を生成する位置合せ処理部420と、階調変換特性に基づいて複数の入力画像の中から選択された一または複数の画像中の画素値を用いて新たな画素値を導出することを画素ごとに行い、合成画像を生成する画像合成処理部320とを備える。
(もっと読む)
画像読取装置の補正方法及び画像処理装置
【課題】高価な測定器を用いることなく、簡単に画像読取時の読取歪みを精度良く補正する。
【解決手段】用紙上に補正パターンが形成された補正用チャート20の読取領域に対する方向を異ならせることにより、補正パターンが読取領域の複数の異なる位置に配置された状態で、それぞれ補正用チャート20を読み取って複数の画像データを取得する。取得された複数の画像データから補正パターンを抽出し、当該抽出された同一の補正パターン同士を比較して、読取領域内の各読取位置に対応する読取歪み量を算出し、算出された各読取位置に対応する読取歪み量に基づいて、画像データの読取歪みを補正する。
(もっと読む)
画像縮小装置、画像拡大装置、及びこれらのプログラム
【課題】原画像列を縮小して縮小画像列を生成する画像縮小装置、縮小画像列を拡大して復元する画像拡大装置、及びこれらのプログラムを提供する。
【解決手段】画像縮小装置10は、処理対象の原画像フレームから位置合わせ情報を生成する位置合わせ情報生成部201と、縮小した縮小画像列を生成する画像縮小部202と、生成した位置合わせ情報、縮小画像列及び点広がり関数を用いて拡大画像フレームを生成し、拡大画像フレームと原画像フレームとの差分値が最小となるように当該位置合わせ情報を修正した情報を複数フレーム超解像補助情報として生成する位置合わせ情報修正部203と、空間オクターブ分解処理とガウシアンフィルタを用いて拡大画像と対応する画像サイズの空間オクターブ分解画像の画素との画素差分値が最小となるガウシアンフィルタの分散値を単一フレーム超解像補助情報として生成する分散値決定部204とを備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画面内における部分的な動きによる映像酔いを防止できるようにする。
【解決手段】入力された映像から画像オブジェクトを抽出し、前記抽出された画像オブジェクトが画面に占める割合と算出するとともに、前記抽出された画像オブジェクトの揺れ周波数を検出する。そして、前記検出した揺れ周波数によって画面に占める割合の閾値を決定する。前記算出した画像オブジェクトの画面に占める割合が前記決定した閾値以上である場合は、前記画像オブジェクトの動きが鈍るように前記画像オブジェクトを補正する。
(もっと読む)
色補正装置、色補正方法及び色補正プログラム
【課題】同じ被写体を2台の仕様の異なるカメラを並べて撮影した際に得られる2つの動画像の間に生じる色差を減らす。
【解決手段】同一の被写体を撮影した2つの動画像MA,MBそれぞれから同時刻におけるフレーム画像MA(t),MB(t)を抽出し、フレーム画像MA(t),MB(t)を複数の領域に分割した領域画像RA(t),RB(t)を生成し、領域画像RA(t),RB(t)間で領域の対応関係および領域毎の色の対応関係を求め、色の対応関係に基づいてフレーム画像MA(t)からMB(t)への色の変換規則を学習し、学習した変換規則に基づいて動画像MAを色補正した動画像MA’を生成する。
(もっと読む)
改ざん検知装置
【課題】従来の改ざん検知装置はどのように改ざんされたかわからなかった。
【解決手段】スキャンにより得られた画像に含まれる符号化画像から情報を取出す取出手段と、前記取出手段で取出された情報で表される画像と、前記対象とする画像とを比較することで、前記スキャンにより得られた画像における改ざん領域を検知する検知手段と、前記スキャンにより得られた画像を表示画面に表示するように制御する制御手段と、を有し、前記制御手段は、前記検知された改ざん領域に関しては、前記スキャンにより得られた画像の代わりに、前記符号化画像の画像内の情報で表される画像を前記表示画面に表示するように制御することを特徴とする。
(もっと読む)
画像データの識別方法及び撮像装置、プログラム、及び記憶媒体
【課題】 個人認証に要する時間を短縮することが可能な撮像装置を提供する。
【解決手段】 複数のフレームの画像データに含まれる顔画像データに対して、個人の識別と表情の識別のいずれかの識別処理を行う画像データの識別方法において、顔検出手段が、前記画像データに含まれる顔画像データを検出する顔検出工程(S202)と、識別手段が、前記顔検出工程で検出された1つまたは複数の顔画像データに対して前記識別処理を行う識別工程(S207)とを有し、前記識別工程では、前記識別処理を行うフレームの画像データに含まれる顔画像データと同じ人物を示す、前のフレームの画像データに含まれる顔画像データについて、前記識別処理に成功した場合に、失敗した場合よりも、高い数値を与えるものであって、該数値の高いものから予め設けた上限に達する数までの顔画像データに対して前記識別処理を行う。
(もっと読む)
異常陰影候補検出システム、サーバ装置及びプログラム
【課題】読影対象の医用画像に対するCADの検出基準と過去画像に対するCADの検出基準を揃えて提供することで、診断精度の向上を図る。
【解決手段】センタサーバ4の制御部は、画像表示装置3から入力された医用画像と同一患者の同一部位を撮影した過去画像及び当該過去画像に対応する検出結果情報を過去画像DBから検索し、検索された過去画像からの異常陰影候補の検出に用いられた異常陰影候補検出プログラムが入力された医用画像からの異常陰影候補の検出に用いられた異常陰影候補検出プログラムと同一であるか否かを判断し、同一ではないと判断した場合に、入力された医用画像と同一の異常陰影候補検出プログラムを用いて過去画像から異常陰影候補の検出を行って、その検出結果情報を入力された医用画像についての異常陰影候補の検出結果情報及び検索された過去画像とともに画像表示装置3に送信する。
(もっと読む)
カメラ装置
【課題】入出力信号特性を補正した際のノイズの増幅を抑制する。
【解決手段】画像を撮像する撮像手段101と、撮像時の露光を制御する露光制御手段102と、入力信号と出力信号の特性が所定の入出力関係になるよう補正する第1の補正手段105と、前記第1の補正手段により補正された後の雑音特性を記憶する補正後雑音特性記憶手段106と、前記補正後雑音特性記憶手段により記憶された雑音特性を補正する第2の補正手段107と、を備える。
(もっと読む)
移動物体検出装置
【課題】日照変化に起因した誤検出を排除して正確な検出を行う。
【解決手段】動画を構成する第i番目の原画像P(i)を、格納部120に格納する。平均画像作成部130は、格納部140内の第(i−1)番目の平均画像A(i−1)と原画像P(i)との重みつき平均を求め、平均画像A(i)として格納部140に格納し、参照画像作成部135は、格納部145内の参照画像U(i−1)をU(i)に更新する。画像比較部は、画像P(i)と画像A(i−1)との比較および画像P(i)と画像U(i−1)との比較を画素ごとに行い、いずれも非類似とされた画素を前景画素(J=0)、他の画素を背景画素(J=1)と判定し、マスク画像Mを作成する。参照画像作成部135は、前景部分は更新せず、背景部分は平均画像A(i−1)との重みつき平均により更新して、参照画像U(i)を作成する。
(もっと読む)
画像処理プログラム、及び画像処理装置
【課題】被写体の動きに応じた好適なトリミング画像を生成する画像処理プログラムを提供することにある。
【解決手段】画像処理プログラムは、画像処理装置としてのコンピュータに、時系列で撮像された複数の画像それぞれから、所定の被写体画像を含む任意の画像領域をトリミングして、トリミング画像を生成するトリミング手順と、撮像された複数の画像のうち少なくとも2つの画像間において、任意の画像領域の位置の変化、または所定の被写体画像の位置の変化を検出する位置検出手順と、位置検出手順により検出された位置の変化に基づいて、トリミング画像内のうち所定の被写体画像の画像領域外となる背景画像領域の高周波数成分を抑圧する画像処理手順と、を実行させる。
(もっと読む)
画像処理装置、撮像装置、画像処理方法およびプログラム。
【課題】 画像回復処理に必要なデータの容量の増加を抑えること。
【解決手段】 本発明のプログラムは、互いに異なる撮影条件で撮像された第1、第2の画像を取得する画像取得ステップと、前記第1、第2の画像の画像を回復するための回復用光学伝達特性を特定する特定情報を取得する特定情報取得ステップと、前記特定情報により特定される回復用光学伝達特性を用いて前記第1および第2の画像を回復する回復ステップを情報処理装置に実行させるプログラムであって、前記特定情報取得ステップにおいて、前記互いに異なる撮影条件における光学伝達特性の位相あるいは振幅に関する特性が類似している場合、前記特定情報に基づいて同じ回復用光学伝達特性が取得されることを特徴とする。
(もっと読む)
照明制御システム
【課題】比較的簡単な構成で、人の存在の有無の検知精度の向上と、人の存在の有無を検知する処理速度の向上とを両立可能な照明制御システムを提供する。
【解決手段】撮像デバイス1と該撮像デバイス1による画像を画像処理することにより人の存在を検知して検知信号を出力する画像処理部2とを備えた人検知センサ部5と、該人検知センサ部5からの検知信号に基づいて照明光を制御する制御部6とを有する照明制御システム10であり、画像処理部2は、上記画像の所定の範囲全体において人の存在を検知する第1の画像処理と、所定の範囲全体を複数の異なる特定の範囲に分割して当該特定の範囲ごとに人の存在を検知した回数を所定の時間の間において計数し、上記所定の時間の経過後は、上記所定の範囲全体よりも狭く、且つ上記計数された頻度が所定の頻度を超えた上記特定の範囲に対して人の存在を検知する第2の画像処理とを行う。
(もっと読む)
照明制御システム
【課題】撮像手段により撮像される所定範囲内の周期動作物体の有無にかかわらず、自動的に人体の検知精度を向上させることが可能な照明制御システムを提供する。
【解決手段】照明器具5と、所定範囲を撮像する撮像手段を具備する画像センサ1と、所定範囲内の人体の在否に基づいて照明器具5を制御する制御部2とを備える。制御部2は、複数の期間において画像センサ1により取得された各画像の差分画像群に繰り返し現れた物体を、周期的な動作をする周期動作物体と判定し、且つ、人体と判定せず、差分画像群に繰り返し現れた物体を周期動作物体と判定したのちに、画像センサ1により取得された画像の差分画像I30に基づいて所定範囲内の人体の在否を判定する。
(もっと読む)
281 - 300 / 2,719
[ Back to top ]