
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
341 - 360 / 2,719
画像処理装置
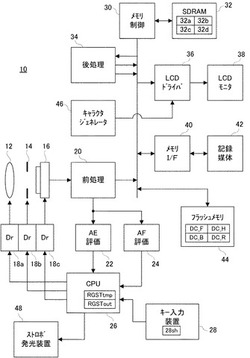
【構成】探索画像データは、イメージャ16によって捉えられた被写界を表して、SDRAM32の探索画像エリア32cに格納される。CPU26は、1または2以上の顔部画像を探索画像データから探索し、これと並列して1または2以上の後頭部画像を同じ探索画像データから探索する。CPU26はまた、1または2以上の顔画像に対応する領域をAFエリアとして設定する処理と、1または2以上の後頭部画像に対応する領域と異なる領域をAFエリアとして設定する処理とを選択的に実行する。ここで、前者のAFエリア設定処理は、後者のAFエリア設定処理に優先して起動される。
【効果】画質の向上が図られる。
(もっと読む)
撮像装置、画像処理装置、および画像処理方法、並びにプログラム

【課題】複数の異なる画像補正を確実に、効率的に実現する構成を提供する。
【解決手段】撮像画像に対する様々な異なる補正処理、具体的には、ズーム倍率補正、歪曲収差補正、回転手振れ補正、平行手振れ補正、光軸中心補正、視差補正、これらの補正を全て確実に実行する。また、これらの補正処理を一括して実行して効率的な処理を実現する。特に2つの異なる視点からの2つの画像を撮影するステレオカメラにおいて必要となるズーム倍率補正、光軸中心補正、視差補正についても、2つの撮像部の撮影画像の少なくともいずれかを補正することで品質の高い3D画像を提供する。各補正に適用する補正ベクトルを統合した統合補正ベクトルを算出して補正することで効率的な補正が実現される。
(もっと読む)
画像処理方法および画像処理装置
【課題】顔領域など特定領域の検出に要する演算量を画像状況に応じて最適化する機能を、被写体の前後動作やズームアップ・ズームアウトの操作に際しても有効化し、演算量削減効果を可及的に高いものにする。
【解決手段】距離算出ステップn10において、順次入力されてくる画像データにおいて距離情報を算出し、距離比較ステップn20において、現在フレーム画像データおよび過去フレーム画像データについてそれぞれ距離算出ステップで得られた距離情報を比較し、特定領域検出用パラメータの設定ステップn30において、距離比較ステップにおける比較結果に基づいて特定領域検出用のパラメータを設定し、特定領域検出ステップn40において、特定領域検出用パラメータの設定ステップにおいて設定された特定領域検出用のパラメータに基づいて特定領域を検出する。
(もっと読む)
画像処理装置
【課題】撮像装置によって撮影された画像が陽炎によって画質劣化したとき、画質の劣化を補正し、揺らぎのない良好な画像を得ること。
【解決手段】参照画像推定部1と、オプティカルフロー計算部2と、動き補正部3を用いて画像処理装置102を構成して、逐次入力される入力画像から動きのない画像(参照画像)を推定し、入力画像および参照画像に基づいてオプティカルフローを計算して入力画像の局所的な揺らぎ(動きベクトル)を算出し、該動きベクトルに基づいて陽炎の揺らぎを相殺するように入力画像の部分画像を移動して入力画像中に存在する陽炎の揺らぎを取り除いた補正画像を生成するようにした。
(もっと読む)
画像処理方法、画像処理プログラム、これを記憶したコンピュータ読み取り可能な記憶媒体、及び画像処理装置
【課題】基準画像と参照画像との間における輝度差が大きい場合等であっても、処理速度を落とすことなく適切に対応点探索処理を行うことのできる画像処理方法等を提供することを課題とする。
【解決手段】基準画像A及び参照画像Bを取得するステップと、基準画像A及び参照画像Bにおける各画素の輝度をそれぞれ正規化処理する正規化処理ステップと、正規化処理された基準画像A上に設定された基準ウィンドウW1内の各画素と、正規化処理された参照画像B上に設定された参照ウィンドウW2内の各画素との相関を算出することで基準画像Aと参照画像Bとの対応点を探索する対応点探索処理ステップと、を含む。
(もっと読む)
画像生成装置、画像生成方法、コンピュータプログラムおよび記録媒体
【課題】自然な立体感が得られる立体視用の画像を生成すること。
【解決手段】記憶部14が、被写体を撮影した撮影画像と、その撮影画像に対応する視差画像とを記憶し、処理対象領域抽出部15cが、記憶部14に記憶された視差画像内から被写体に対応する処理対象領域を抽出し、視差値変更部15dが、処理対象領域抽出部15cにより抽出された処理対象領域の視差値を変更し、大きさ調整部15eが、視差値変更部15dにより変更された視差値に基づいて、撮影画像における処理対象領域に対応する被写体の大きさを調整し、画像生成部15fが、大きさ調節部15eにより被写体の大きさが調整された撮影画像に基づいて、立体視用の画像を生成する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】二次元映像について、フレームレートを向上させるとともに、擬似的な三次元映像に変換する場合の演算負荷を抑制する技術を提供する。
【解決手段】ワンセグ受信モジュール1に、前後する2のフレームデータから動きベクトルを含む特徴量を抽出する特徴抽出部100と、抽出された動きベクトルに応じて、前後する2のフレームデータのうちの1のフレームデータを構成する複数の画素について三次元化させる対象領域を設定する領域設定部101と、抽出された動きベクトルを含む特徴量に基づいて、設定された対象領域ごとの視差量を演算する視差量演算部102と、抽出された動きベクトルと設定された対象領域と求められた対象領域の視差量とに基づいて、二次元映像データ111から当該二次元映像データ111におけるフレームレートを変更した擬似的な三次元映像データ112を生成する生成部103とを設ける。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
物体検出装置
【課題】ノイズを低減して移動物体の飛び出しを精度よく検出する物体検出装置を提供する。
【解決手段】物体検出装置1は、取得した画像情報から障害物を検出する障害物検出部21と、障害物検出部21が検出した障害物の近傍にある道路境界線を画像情報から取得する境界線取得部23と、境界線取得部23で取得した道路境界線の連続性を計算する連続性演算部25と、を備え、現在の画像情報について境界線取得部23で得られる道路境界線の連続性と、過去の画像情報について境界線取得部23で得られる道路境界線の連続性と、に基づいて障害物の飛び出し確率を算出する。
(もっと読む)
画像データ処理システム
【課題】長い距離にわたるコンクリート壁面などのコンクリート構造物の診断を、安価にしかも短時間で行うことが可能な画像データ処理システムを提供する。
【解決手段】移動式架台10に搭載された可視画像撮影用カメラ60と赤外線カメラ70と、最初の可視画像データ及び赤外線画像データに撮影された対象物上の基準点に基づいて、前記複数の可視画像データ及び赤外線画像データの位置関係を求め、前記最初の可視画像データ及び赤外線画像データに対して、あおり補正を施した上で、2番目以降の規格化可視画像データ及び規格化赤外線画像データを、前記位置関係に基づいて重畳し2番目以降の重畳データとし、前記最初の重畳データと前記2番目以降の重畳データとを連結することを特徴とする。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
運転支援装置
【課題】車載カメラとして単眼カメラを備えた安価な構成により、従来よりコスト低減を図って、撮影カメラの撮影画像から将来の(その後の)TTCを正確に推定することができる車両支援装置を提供する。
【解決手段】車載カメラとしての単眼カメラ2により自車両1の周辺を撮影し、演算部3の近似手段により、単眼カメラ2の複数時点の撮影画像中の障害物の撮影倍率から衝突可能性の経時変化特性を近似し、演算部3の推定手段により、近似手段の近似結果に基づいて将来の衝突可能性を推定する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
車高計測装置
【課題】運転者自らが計測することなしにトレーラの実際の車高を計測することのできる車高計測装置を提供することを目的とする。
【解決手段】自車両の周囲の撮影画像を画像処理する画像処理手段11と、この画像処理手段11による処理画像に基づいて自車両が牽引するトレーラの車高を算出する算出手段13とを備え、算出手段13は、画像処理手段11が画像処理した自車両前方の撮影画像および自車両が牽引するトレーラ後方の撮影画像とに基づいて自車両が牽引するトレーラの車高を算出する。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】補正対象画像の中心に人物が写されている場合に限ることなく、人物全体の補正を行い、被写体の人物の見栄えを良くする画像処理装置を提供する。
【解決手段】画像処理装置は、補正対象の画像から、人物の顔領域を抽出し、抽出した顔領域を含む領域を、補正対象画像のうち縮小する補正を行う縮小領域と特定し、補正対象画像のうち拡大する補正を行う拡大領域と特定し、定められた縮小率に基づいて画像の縮小領域の画像を縮小し、縮小領域と拡大領域との比に応じて画像の拡大領域の画像を拡大した補正画像を生成する。
(もっと読む)
境界線検出方法とパターン検査方法
【課題】特別なソフトウェアを使用することなく、より正確な境界線を求めることができる境界線検出方法を提供する。
【解決手段】隣り合う各領域Z1,Z2のピッチをP1,P2とし、R1(m)=mod(mP1,P2/2),R2(m)=mod(mP1,P2),R(m)=R1 (R1≠R2の時),R(m)=P2/2−R1(R1=R2の時),E(m)=R(m)/(P2/2)において、mが整数であるときE(m)が最も小さくなるmを求め、両領域全体において距離mP1離れた画素同士の比較検査を行い、正常な画素を消去し、欠陥として残る画素の包絡線を境界線とし、同様の操作を他の領域間で行いピッチの異なる領域を検出する。
(もっと読む)
画像形成装置、画像形成方法、及びコンピュータプログラム
【課題】 微小画素の追加あるいは削除を行うことにより主走査幅を拡大あるいは縮小するに際し、濃度ムラの発生を低減させる。
【解決手段】 補正対象の画素については、補正前後における濃度差を導出し、導出した濃度差を、同一の主走査方向においてそれまでに導出された濃度差に加算して累積濃度差を導出する。補正対象の画素の濃度差を導出する前までに導出されている累積濃度差が閾値ETH−以下である場合には、補正対象の画素のデータに白の微小画素を追加し、閾値ETH+以上である場合には、補正対象の画素のデータに黒の微小画素を追加する。一方、累積濃度差が閾値ETH−以下でもETH+以上でもない場合であって、補正対象の画素の濃度が閾値以上である場合には、補正対象の画素のデータに黒の微小画素を追加し、そうでない場合には、補正対象の画素のデータに白の微小画素を追加する。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
スペクトル情報抽出装置
【課題】 飛翔体により撮影された画像等を利用して対象物を解析し,管理する場合,解像度が対象物に対して低いことが多く,個別対象物を管理することが難しかった。
【解決手段】 解析対象とする物体についての高空間分解能画像503と低空間分解能画像502とを対応づける画像対応部と、上記高空間分解能画像を用いて、上記物体が低空間分解能画像の画素中で占める割合を求める空間解析部と、上記割合に基づいて、低空間分解能画像のスペクトル504を複数のスペクトル505に分解するスペクトル割当部とを設けた。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
341 - 360 / 2,719
[ Back to top ]