
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
361 - 380 / 2,719
立体映像変換装置及び立体映像表示装置
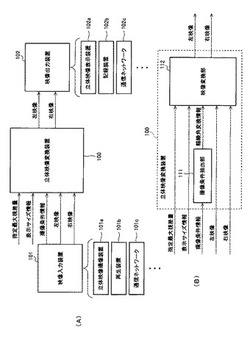
【課題】立体視用の映像を表示する際に、画面サイズによらず引っ込み方向の視差量を、所定の視差以下で表示することができる立体映像変換装置を提供する。
【解決手段】立体映像変換装置100は、左右映像を撮像した際の撮像条件である輻輳角変換情報を抽出する撮像条件抽出部111と、左右映像を撮像した際の輻輳角を変更する映像変換部112とを備える。映像変換部112は、撮像条件抽出部111で抽出された輻輳角変換情報及び左右映像を表示させる表示画面の表示サイズ情報に基づいて、左右映像の最大視差量を算出し、算出した最大視差量が予め指定された最大視差量以下となる輻輳角補正値を算出する輻輳角補正値算出部と、算出した輻輳角補正値に基づいて左右映像を撮像した際の輻輳角を変更させた映像を生成する輻輳角変換処理部とを備える。
(もっと読む)
画像解析装置

【課題】何らかの方法により運転者本人の画像、特に覚醒時の正面画像を取得して、それを用いて画像解析して運転者の眠気や脇見の程度(有無)を算出する画像解析装置を提供する。
【解決手段】運転者の所持する免許証内の顔画像をカードリーダ6で取得し、近赤外線カメラ2で運転者の顔画像を撮影する。運転者本人の覚醒時の正面画像である免許証内の顔画像から部分画像をテンプレート画像として抽出して、カメラ2による撮影画像に対して認識処理を行う。免許証内の顔画像とカメラ2による撮影画像とにおける特徴量の比較により運転者の眠気度、脇見度を判定して、眠気あり、脇見ありの場合に警報装置4で警報を発する。
(もっと読む)
差異検出装置、差異出力装置及びプログラム
【課題】少なくともいずれかの画像が、複数の画像からなる組を構成する一の画像であるような2つの画像間において、画像に共通して存在する有色画素に差異が埋れてしまうことを防止すること。
【解決手段】本発明に係る差異検出装置1は、少なくとも1以上の第1の画像と、少なくとも1以上の第2の画像を受け付ける画像受付手段と、第1の共通画像中に含まれる有色画素を含む第1の除外領域、又は第2の共通画像中に含まれる有色画素を含む第2の除外領域、若しくは前記第1の除外領域及び前記第2の除外領域を取得する除外領域取得手段と、前記第1の除外領域、前記第2の除外領域、前記第1の除外領域と前記第2の除外領域の和集合、及び、前記第1の除外領域と前記第2の除外領域の積集合のいずれかの領域を除き、第1の注目画像と、前記第1の注目画像に対応する前記第2の画像である第2の注目画像との差異を検出する第1の差異検出手段と、を有する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法及びコンピュータプログラム
【課題】少ない投影パターン数で、形状変化が急激な計測対象や不連続な計測対象の高精度な形状計測を可能とする。
【解決手段】三次元形状計測装置は、明るさ変化を有するパターンを計測空間に投影するパターン投影手段と、パターンが投影された計測空間を撮影する撮像手段とを備え、計測空間に存在する計測対象の三次元形状を計測する三次元形状計測装置であって、撮影手段により得られた撮影画像のパターンの明るさ変化からパターンの局所的な配置情報を算出する局所配置情報算出手段と、撮影画像におけるパターンのボケ量を算出するボケ量算出手段と、局所配置情報とボケ量とに基づき、計測対象の三次元形状を算出する三次元形状算出手段とをさらに備える。
(もっと読む)
映像解析方法およびシステム
【課題】歩行者を時系列的に撮像することにより、該歩行者を的確に分類する。
【解決手段】映像シーケンスの特徴を分類する方法は、前記映像シーケンスのフレームの、前記特徴を含んでいる対象領域を選択すること、前記対象領域を複数のセルに分割すること、前記セルによりオプティックフローのヒストグラムを計算すること、セル対についての前記オプティックフローのヒストグラムを比較すること、前記比較の結果の少なくとも一部に基づいて前記特徴をクラスに割り当てること、を含む。
(もっと読む)
画像処理装置、その処理方法及びプログラム
【課題】対象物の検出精度を向上させる技術を提供する。
【解決手段】画像処理装置は、検出すべき対象物を含む画像から輝度情報に基づいて第1の特徴量を取得する第1の特徴量取得手段と、第1の特徴量に基づいて画像から領域を検出するとともに、当該領域における対象物に対する尤度を算出する尤度算出手段と、算出された尤度が第1の閾値以上である領域を対象物が存在する対象物領域として検出するとともに、算出された尤度が第1の閾値未満で且つ第2の閾値以上である領域を対象物が存在する可能性のある候補領域として検出する第1の検出手段と、候補領域について第1の特徴量とは異なる第2の特徴量を取得する第2の特徴量取得手段と、第2の特徴量の値に基づいて各候補領域の尤度を補正する補正手段と、補正された尤度が第1の閾値と第2の閾値との間の値を持つ第3の閾値以上となる候補領域を対象物領域として検出する第2の検出手段とを具備する。
(もっと読む)
画像処理装置、撮像装置、及びそれらの制御方法
【課題】映像中の対象物の動きの質に応じて、撮像時のボケの低減とランダム感の抑制とを両立可能な技術を提供する。
【解決手段】画像処理装置は、動く対象物を撮像した映像信号であって、前記対象物のぶれを含まない第1の映像信号と前記対象物のぶれを含む第2の映像信号とを入力する入力部と、映像信号を解析して前記対象物の動きを検出する動き検出部と、検出された動きの質に応じて、前記第1の映像信号と前記第2の映像信号を切り換え又は合成することにより出力映像信号を生成する出力制御部と、を有する。出力制御部は、等速度又は等加速度の動きである場合には第1の映像信号を、等速度又は等加速度の動きでない場合には第2の映像信号を出力する。或いは、等速度又は等加速度の動きでない場合には、等速度又は等加速度の動きである場合に比べ、第2の映像信号の重みを大きくする。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記憶媒体
【課題】全体領域に対して観察領域の占める割合が大きい画像に対して、正確に背景の明度分布を推定する。
【解決手段】制御部11は、元画像を入力し(S101)、近似多項式曲面の算出処理から除外する画素を抽出する(S102)。次に、制御部11は、S102によって抽出される画素に基づいて、近似多項式曲面の算出処理における連立方程式を定式化し(S103)、近似多項式曲面の算出処理を実行する(S104)。そして、制御部11は、S104によって算出される近似多項式曲面に基づいて、背景画像を生成する(S105)。
(もっと読む)
画像処理装置及び画像処理システム
【課題】画像領域境界付近での距離誤差を低下させ、立体画像における遠近視認上の違和感を軽減させる画像処理技術を提供する。
【解決手段】立体画像を生成しようとする被写体の2次元画像上でエッジを抽出し、エッジで囲まれた各領域の相互境界QM付近で距離画像の補正を行う。このような領域境界では、遠近競合によって一方の領域CAの距離情報に他方の領域RAの距離情報が混入していることから、領域境界QMに近づくにつれて他方領域の距離情報の値へと変化しようとする傾向になり、それが誤差の原因となる。そのような誤った変化を抑圧すべく、領域境界QMの近くの画素であって、距離情報の変化が大きな画素については、距離情報の変化を抑制するような補正を行う。
(もっと読む)
放射線撮影装置、放射線撮影システム、画像処理装置及びプログラム
【課題】逆コンプトン散乱により放射線を照射する放射線源を用いた場合でも良好なエネルギーサブトラクション画像を得ることができる放射線撮影装置、放射線撮影システム、画像処理装置及びプログラムを提供する。
【解決手段】撮影された高エネルギーの放射線による放射線画像及び低エネルギーの放射線による放射線画像を対応する画素毎に、放射線源から照射される放射線の中心位置からの距離に応じて重み付けを変え、高エネルギーの放射線による放射線画像の重み付けを小さくして高エネルギーの放射線による放射線画像から低エネルギーの放射線による放射線画像を減算する重み付け演算を行って軟部画像を生成する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】複数の視差候補の中から最適な視差を精度よく選択することができる画像処理装置等を提供する。
【解決手段】画像取得部11は、同一被写体について視差のある2つの画像を取得する。特徴点候補取得部12は、画像取得部11により取得された一方の画像から特徴点候補を取得する。視差候補取得部13は、ステレオマッチングを行い、他方の画像から特徴点候補毎の視差候補をそれぞれ取得する。特徴点選択部14は、取得された特徴点候補の中から所定の条件を満たすものを特徴点として選択する。隣接点取得部15は、特徴点選択部14により選択された特徴点に隣接する隣接点を、特徴点毎にそれぞれ取得する。視差決定部16は、特徴点と、視差候補と、隣接点と、に基づいて、確率伝搬法によるアルゴリズムを用いた処理を実行し、各特徴点に対応する視差を決定する。
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】本発明は、被写体が一様なテクスチャを持つため対応点が複数存在する場合や、一部の色が異なる被写体の場合であっても、偽マッチングおよびオクルージョンの有無を正しく判定し、奥行値の誤推定を低減する奥行推定装置を提供する。
【解決手段】奥行推定装置1は、映像入力手段10と、対応画素差分値を演算する対応画素差分演算手段20と、近傍画素の画素値を出力する近傍画素値出力手段30と、近傍画素の奥行値を出力する近傍奥行値出力手段40と、近傍画素の奥行値に対応する近傍奥行対応画素値を出力する近傍奥行対応画素値出力手段50と、最小差分値または平均差分値を選択差分値として決定する差分値決定手段60と、平滑化を行う平滑化手段80と、平滑化差分値の全画素での和が最小となる仮定奥行値を、基準映像の各画素の奥行値とする奥行値決定手段90とを備える。
(もっと読む)
画像処理システムおよび画像処理方法
【課題】2つの画像の位置合わせが容易で、かつ様々な直線を軸とした撮影装置の回転に対しても画像の合成を可能にするように、2画像の一方の画像を変形させる。
【解決手段】2つの画像の一方の画像を基準画像、他方の画像を比較画像に指定する。基準画像の全体に分散するように複数の測定点FP1〜FP24を設定する。比較画像において、測定点FP1〜FP24に対応する複数の移動点SP1〜SP24を検出する。比較画像を、測定点と同じ座標を頂点とする複数の矩形の部分画像に分割する。各部分画像の頂点を移動点に移動させて部分画像PA1〜PA15を変形させることにより、変形部分画像を作成する。全ての変形部分画像を、共通する移動点が同じ位置になるように結合することにより結合画像を作成する。
(もっと読む)
基板の印刷誤差補正方法
【課題】誤差なしに印刷がなされるようにした基板の印刷誤差補正方法を提供する。
【解決手段】基板100の設計仕様情報からアラインマーク101の座標と各シート110の外郭に形成された認識マーク111の座標とを取得し、該基板100の実測情報から歪曲されたアラインマーク101の座標と各シート110の認識マーク111の座標とを取得し、該基板100の設計仕様情報から取得された座標情報と該基板100の実測情報から取得された座標情報とを演算して補正係数値を算出し、該補正係数値を用いて基板100の実変形値を算出し、該実変形値を該設計仕様情報に適用して補正された二値イメージの変形データに変換し、該変形データを基準に基板100に印刷を行う。
(もっと読む)
車線推定装置
【課題】二重白線等、走行車線の内外に、走行車線と誤認し易い車線候補点が断続的にプロットされた場合であっても、走行車線を連続して推定することができて、安定した運転支援を行うことができるようにする。
【解決手段】前回求めた走行車線の内側エッジを推定する仮想線に基づいて今回の予測標準線LpL,LpRを求め(S12)、この予測標準線LpL,LpRと車線境界をプロットする第1候補点P1の点列との一致度を求め(S13)、第1候補点P1が最も一致度が高いと判定した場合、この第1候補点P1の点列を今回の主候補点Pmの点列として設定する(S18)。そして、この主候補点Pmの点列に基づき曲線近似式(y=ax2+bx+c)から、今回の走行車線の内側エッジを推定する仮想線Lsを求める。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】異なる条件から目的の視点の映像を合成した中間的な合成視点映像を画素単位で精度よく適切に選択することで合成品質を向上させる。
【解決手段】映像処理装置は、複数の異なる位置から被写体を撮影して、任意の視点の映像を生成する。仮想視点生成部5,6は、求める仮想視点の映像を生成するために選択された複数のカメラ映像を用いて中間的な合成画像を生成する。定常性特量算出部は、中間的な合成画像から局所的な定常性を示す特徴量を算出する。合成比率算出部13は、算出した特徴量に基づいて中間的な合成画像を適切に選択、あるいはブレンドするための合成比率を算出する。特徴量は、局所領域におけるエッジ量のエントロピー(平均情報量)とし、その値が小さい(より定常的である)方の中間的な合成画像を選択するか、あるいは重みを高くする。
(もっと読む)
画像処理装置及びそれを用いた撮像装置
【課題】特別な設備を必要とせず、簡易且つ精度良くキャリブレーションができる画像処理装置及びそれを用いた撮像装置を提供する。
【解決手段】少なくとも2台のカメラ4a,4bを具備し、各カメラから得られる画像の領域の対応関係を求める対応領域算出部23と、各カメラから得られる画像の対応領域から得られる情報の一致度を求める一致度算出部24と、一致度算出部が算出した一致度をもとにカメラパラメータを求めるカメラパメータ算出部25を具備する。
(もっと読む)
道路使用弱者保護システム
【課題】車両と道路使用弱者との衝突を回避する道路使用弱者保護システムを提供する。
【解決手段】視覚的場面の距離マップがステレオビジョンおよび協働する画像処理システムにより生成され、関心領域外および衝突が不可能の対象物がフィルターにより取り除かれ、また道路表面も取り除かれる。距離ビンにクラスター分けされた対象物がセグメンテーションにより分離される。主要コンポーネント解析によってコンポジット距離マップが生成され、連結コンポーネント篩い分けフィルタにより処理される。対象物は一つ又は複数のハーモニックプロファイルおよびほかの特性を用いて、インクルーシブ、エクスクルーシブ及びハーモニックネットワークの組み合わせで種類分けの基準を生成し、認識プロセッサを用いて判別される。
(もっと読む)
検出装置、検出方法、プログラム、及び電子機器
【課題】外光光源による影響を低減して、精度良く肌領域を検出する。
【解決手段】LED21a1及びLED21a2は、第1の波長の光を被写体に照射し、LED21b1及びLED21b2は、第2の波長の光を被写体に照射し、カメラ62は、第1の波長の光が被写体に照射されているときに入射される被写体からの反射光に基づいて第1の画像を生成し、第2の波長の光が被写体に照射されているときに入射される被写体からの反射光に基づいて第2の画像を生成し、第1及び第2の波長の光が被写体にいずれも照射されていないときに入射される被写体からの反射光に基づいて外光画像を生成し、情報処理装置63は、第1の画像の画素値、第2の画像の画素値、及び外光画像の画素値に基づいて、被写体の肌部分を示す肌領域を検出する。本発明は、例えば、画像から被写体の肌領域を検出する検出装置に適用できる。
(もっと読む)
立体画像表示制御装置ならびにその動作制御方法およびその動作制御プログラム
【課題】画像合成領域に余白が生じないようにする。
【解決手段】ユーザが視差量を設定する(ステップ72)。画像合成領域に立体画像が表示される(ステップ74)。立体画像が,設定された視差量となるように調整される(ステップ75)。視差量が調整されたことにより,画像合成領域内に余白ができたかどうかが判定される(ステップ76)。余白ができると(ステップ76でNO),余白ができない範囲まで立体画像が拡大される(ステップ77)。
(もっと読む)
361 - 380 / 2,719
[ Back to top ]