
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
261 - 280 / 2,719
画像作成方法、基板検査方法、その画像作成方法又はその基板検査方法を実行させるためのプログラムを記録した記録媒体及び基板検査装置
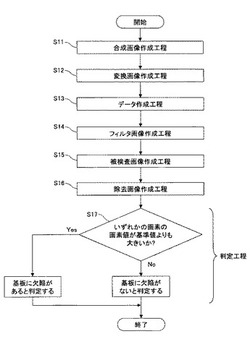
【課題】誤って検出される擬似欠陥の数を低減できるとともに、欠陥の検出感度を落とすことなく、本来検出されるべき真の欠陥を検出できる基板検査方法及びその基板検査用のフィルタ画像の画像作成方法を提供する。
【解決手段】
基板の欠陥の有無を検査するために擬似欠陥を除去するためのフィルタ画像を作成する画像作成方法において、登録された画像の中心位置を中心とする円の円周上に位置するいずれかの画素の画素値を、円周上に位置する画素から選択した複数の画素の画素値のうちの最大値に置換することによって、フィルタ画像を作成するフィルタ画像作成工程S14とを有する。
(もっと読む)
ジェスチャ認識装置、ジェスチャ認識方法、及び、コンピュータプログラム

【課題】 ジェスチャに応答して制御を実行する電子機器が、載置して使用されるものであっても、撮影の観点から、ジェスチャを行う位置の制限を受け難いジェスチャ認識装置を提供する。
【解決手段】 ジェスチャ認識装置1は、ストラップ2により、オペレータ100の胸に配置される。ジェスチャ認識装置1は、内蔵するイメージセンサ7による撮影により得られたオペレータ100の手の画像に基づいて、ジェスチャを認識する。ジェスチャ認識装置1は、認識したジェスチャを示す情報を、オペレータ100に装着されることなく載置された電子機器21に送信する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】簡単な構成で、全天周に存在する物体などのそれぞれについて視点からの距離を把握することができるようにする。
【解決手段】撮像部201は、カメラ211とカメラ212を制御して、それぞれのカメラにより異なる方向から球面ミラー220の画像を撮像する。マッピング処理部202は、カメラ211により撮像された画像のデータから球面ミラー220の画像を抽出し、球面ミラー220の画像を仮想的な円筒にマッピングする処理を行う。解析部203は、マッピングされたカメラ211の画像とカメラ212の画像のペアの各画素について差分絶対値を算出する。距離推定部204は、各画素位置の差分絶対値の最小値を検索して、最小値に対応する半径を特定し、その半径を当該画素の被写体の球面ミラー220の中心からの距離として記憶する。
(もっと読む)
面形成支援システム、面形成支援装置、及び面形成支援プログラム
【課題】本発明は、施工作業に要する時間を短縮させることができる面形成支援システム、面形成支援装置、及び面形成支援プログラムを提供する。
【解決手段】仮想空間において、予め定められた目標面に表示された所定画像を予め設定した複数の撮影位置から予め設定した撮影方向に向けて仮想的に撮影することにより得られる撮影位置毎の画像情報を生成する情報生成装置と、実空間において、目標面に対する複数の撮影位置と同一の位置関係になるよう各々設置され、対応する画像情報により示される画像を、前記目標面を形成する際の基礎となる基礎面に、対応する撮影方向に向けて投影する複数の投影装置と、を備えた。
(もっと読む)
2次元コードを検出可能な装置
【課題】原稿に付加されている2次元コードを検出する場合、読み取った画像の四隅を見て検出処理を行っているため、A4サイズ原稿の複写において、ユーザが画像の読み取りサイズをA3に指定すると、2次元コードの検出が行えない。
【解決手段】複写機が検出した原稿サイズとユーザが指定する画像の読み取りサイズが異なる場合、複写機が検出した原稿サイズの領域の四隅を見て、2次元コードの検出処理を行う。
(もっと読む)
画像処理装置および画像処理方法
【課題】大容量の記憶部を備えることなく、背景のみの画像生成に要する時間を短縮することができる画像処理装置および画像処理方法を提供する。
【解決手段】初回の画像データを第1の画像データとして記憶し画素データを第1の画素データとして順次出力する第1の画像データ記憶部と、2回目以降の複数の画像データを第2の画像データとして順次記憶し画素データを第2の画素データとして順次出力する第2の画像データ記憶部と、平均値を画像データ内の画素データの配置位置毎に算出して順次出力する平均算出部と、平均値を画像データに対応した平均値データとして順次記憶する平均値記憶部と、平均値に基づいて画素データの位置と同じ位置に配置されている第1の画素データまたは第2の画素データのいずれか一方をそれぞれ選択し更新データとして順次出力する差分比較部と、を備え、第1の画像データ記憶部に更新データを第1の画素データとして順次記憶する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法、及びプログラム
【課題】多視点からの撮影画像を取得する装置において、撮影画像群に欠陥を含む画像がある場合でも、ボケ味の対称性を維持したボケ画像を生成する。
【解決手段】異なる視点から被写体を撮影する複数の撮像手段によって撮影されたそれぞれの撮影画像を取得する。複数の撮影画像から欠陥画像を特定する。特定された欠陥画像を撮影した撮像手段の位置に基づいて、各撮影画像に対する重みを決定する。決定された重みに基づいて、複数の撮影画像を重み付け合成して合成画像を生成する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】複数の画像を効率よく処理する画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】複数の画像取得部は各々画像を取得し、車両情報取得部は車両の移動状態を示す車両情報を取得し、画像補正量算出部は複数の画像取得部のうち1つの画像取得部が取得した第1の画像と、他の画像取得部が取得した第2の画像との位置関係に基づき画像補正量を算出し、画像補正値算出部は、車両情報に基づいて推定した位置関係に基づき当該画像補正量を算出する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム、並びに撮像装置
【課題】 複数の低解像度画像の中から、高画質の高解像度画像を生成するのに適した基準画像を選択できる画像処理装置を提供する。
【解決手段】 画像処理装置100は、複数の低解像度画像のうちの1つを基準画像候補として選択して、その他の低解像度画像を位置合わせするための変換行列を求める位置合わせ部102と、その他の低解像度画像を変換行列で座標変換して、基準画像候補及び座標変換された低解像度画像をマッピング画像にプロットして基準画像選択用再構成画像を生成する再構成処理部103と、マッピング画像にプロットされた、基準画像候補及びその他の低解像度画像の画素数が多いほど、また、マッピング画像上の同一の画素に重複してプロットされた画素数が少ないほど、基準画像候補に高い評価値を付与する評価値算出部104と、評価値の高い基準画像候補を基準画像として選択する基準画像選択部105とを備えている。
(もっと読む)
磁性システムを特徴付けるための装置および方法
【課題】理論的シミュレーションモデルを最適化することにより測定されたデータに適合させる。
【解決手段】磁界の測定データと理論的なモデリングデータまたはシミュレーションデータとを組み合わせることによって、磁性システムの定量的な特性を取得するデータ処理方法であって、測定データに対する最良適合を取得するために、理論的なモデルの入力パラメータが最適化方法を用いて最適化される方法において、処理を大幅に高速化させるために、実行を最適化する前に磁界分布を予め計算する。この改善されたデータ処理と、例えば磁界カメラを用いた高速磁界マッピングとを組み合わせることによって、磁性システムのリアルタイムにおける測定およびデータ分析を、例えば品質管理において適用させることが可能になる。
(もっと読む)
オブジェクト追跡装置、方法、及びプログラム
【課題】オブジェクトを追跡する際に、オブジェクトの位置推定の精度を向上させる。
【解決手段】位置予測手段14は、2以上のフレーム画像間のオブジェクトの動きに基づいて、処理対象のフレーム画像におけるオブジェクトの位置を予測する。位置マップ生成手段15は、予測された位置の周辺の複数の位置とオブジェクトの存在確率を示す値との対応関係を位置マップとして生成する。特徴量計算手段16は、予測された位置の近傍の複数の位置のそれぞれでオブジェクトらしさを示す特徴量を計算し、アピアランスマップを生成する。位置推定手段17は、位置マップとアピアランスマップとを組み合わせ、処理対象のフレーム画像におけるオブジェクトの位置を推定する。
(もっと読む)
ステレオ画像処理装置及びステレオ画像処理方法
【課題】テクスチャの弱い領域を有する画像であっても、画像の対応付けに際しミスマッチングを軽減して高精度の視差検出を行うことができるステレオ画像処理装置、方法を提供する。
【解決手段】第一の画像と第二の画像が入力されると、第一の画像の第一の画素データを相互に異なる位置に含む複数の第一のウィンドウの各々について、当該第一ウィンドウと、指定された視差データに対応した前記第二の画像の第二のウィンドウとの間の非類似性に応じた評価値であるウィンドウコストを生成する。次に、第一のウィンドウのウィンドウコストに、第一の画素データに隣接する三以上の画素データのウィンドウコストを累積加算した累積加算コストを集計した修正コストを計算し、計算した修正コストに基づいて第一の画像の画素データそれぞれの対応点を第二の画像において求め、視差データを出力する。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】欠陥検査装置のレシピで設定するセル領域の設定を自動化する方法を提供する。
【解決手段】CellMatAreaの区別をCellMatAreaと非CellMatAreaのGrayLevelの分布特徴の差を用いてイメージをスキャンして、その結果からCellMatAreaと非CellMatAreaを分ける方法を取った。具体的にはCellMatの始点と終点を区別するための基準になる閾値をMemoryCellだけあるAreaで計算した後、その閾値を適用して始点と終点を探してそのそれぞれを繋げてCellAreaを作成した。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】ディスパリティ画像を生成するためのステレオ画像を撮像するカメラの光軸のずれを補正する。
【解決手段】カメラ21−1,21−2は、異なる視点から、同一の被写体を撮像する。画像ずれ補正部22は、撮像された複数の画像を、ずれ調整部24の調整パラメータ保存部82に保存されている調整パラメータに基づいて変形し、それぞれ補正画像を生成する。マッチング部23は、ステレオマッチング処理によりディスパリティ画像を生成すると共に、複数の補正画像間の視差方向の対応付けが不能な程度を示すエラー量の全画面の積分値をマッチング評価値として算出する。ずれ調整部24は、調整パラメータのうち、視差方向の対応付けに必要とされるパラメータを変化させて、マッチング評価値が最小となるように調整パラメータを更新して、調整パラメータ保存部82に保存する。本発明は、ディスパリティ画像生成装置に適用することができる。
(もっと読む)
撮影装置、撮影装置の制御装置、撮影装置の制御プログラム、及び撮影装置の制御方法
【課題】被写体の三次元画像を精度良く生成できる撮影装置、撮影装置の制御装置、撮影装置の制御プログラム、及び撮影装置の制御方法を提供する。
【解決手段】撮影装置100は、被写体を撮影する撮影部と、撮影された撮影画像を用いて、被写体の三次元モデルを生成するモデル生成部143aとを備える。また、撮影装置100は、生成された三次元モデルからノイズを除去するノイズ除去部143dと、ノイズが除去された三次元モデルに基づいて、三次元画像を生成する三次元画像生成部145と、を備える。ここで、ノイズ除去部143dは、生成された三次元モデルを構成する点に対応する対応点が、当該三次元モデルの生成に用いられた撮影画像の撮影位置と異なる位置から撮影された撮影画像を用いて生成された三次元モデルを構成しない場合に、当該点はノイズであると判定する。
(もっと読む)
顔画像処理方法、美容カウンセリング方法および顔画像処理装置
【課題】顔印象の決定因子を知得することのできる顔画像処理技術および美容カウンセリング方法を提供する。
【解決手段】本発明の顔画像処理方法では、顔の少なくとも一部が撮像された顔画像に関して、前記顔の形状、テクスチャまたは色より選択(重複選択を含む)された少なくとも第一の変化軸および第二の変化軸についてそれぞれ主成分分析して複数次の基底ベクトルの重み係数を算出する。前記第一の変化軸にかかる前記重み係数を変更した第一変化画像と、前記第二の変化軸にかかる前記重み係数を変更した第二変化画像と、を生成する。そして、前記第一変化画像と前記第二変化画像とを互いに対比して出力する。
(もっと読む)
立体物検知装置および立体物検知方法
【課題】静止物が接近物であるとの誤判定を低減することができる「立体物検知装置および立体物検知方法」を提供すること。
【解決手段】移動体に配置された単一の撮像手段2と、撮像手段2の撮像画像に基づいて、立体物の検出および当該立体物に対応する検出画像の作成を繰り返す立体物検出手段4と、最新の検出画像と前回の検出画像との差分面積に基づいて接近物判定を行う接近物判定手段6とを備え、接近物判定手段6は、差分面積が増加した場合であっても、このことのみを以て直ちに立体物が接近物であると判定せずに、移動体が移動中ではないこと、または、移動体が移動中であるが差分面積の変化量が閾値変化量以上ではないことが判明した上で接近物であると判定すること。
(もっと読む)
全方位画像生成方法、画像生成装置およびプログラム
【課題】複数の画像から奥行きのあるシーンの全方位画像を生成する。
【解決手段】複数の画像から奥行きのあるシーンの全方位画像を生成する全方位画像生成方法であって、複数の視点位置から被写体を撮像した画像を取得するステップと、取得したそれぞれの画像を予め定義した複数のレイヤ面に投影するステップと、画像が投影されたレイヤ面上における被写体の色情報または輝度情報とを算出するステップと、取得した画像上の被写体の点をレイヤ面上に投影した画像の点との類似度を求めることにより、レイヤ面上の各点における被写体の存在確率を表す信頼度を算出するステップと、信頼度に基づき、被写体の信頼度が最も高いレイヤを中心として複数のレイヤを選択するステップと、選択されたレイヤ面上における被写体の色情報または輝度情報と信頼度情報に基づき、奥行きのあるシーンの全方位画像を生成するステップとを有する。
(もっと読む)
監視用画像処理装置
【課題】人物をマスク画像で効果的に隠しプライバシー保護を十分に図ることができる監視用画像処理装置を提供することを目的とする。
【解決手段】 監視対象エリアの現在の画像である現画像を記憶する現画像記憶手段と、前記現画像と比較するための比較用画像を記憶する比較用画像記憶手段と、前記現画像と前記比較用画像とを比較し変化領域を抽出する変化領域抽出手段と、前記変化領域内の各輝度値を所定の閾値で2値化し、該2値化後の結果に基づいて前記現画像内のマスキングする領域を設定するマスク領域設定手段と、前記マスク領域内を覆う第1のマスク画像を作成する第1のマスク画像作成手段と、前記現画像の前記マスク領域に前記第1のマスク画像を重ね合わせた重ね合わせ画像を作成する重ね合わせ手段とを有することを特徴とする。
(もっと読む)
移動体検出装置
【課題】動きベクトルを用いることなく撮影画像から移動体を検出する
【解決手段】フレームデータを取得する毎に、このフレームデータと、1フレーム前のフレームデータとを差分したフレーム差分画像データ(S40)を、ブロック画素を単位として分割し、ブロック画素毎に離散コサイン変換(DCT)を行うことにより、二次元DCT係数を算出し(S60,S70)、二次元DCT係数を蓄積して記憶する(S100)。そして、二次元DCT係数の各要素の値を配列して特徴ベクトルを構成し、フレーム差分画像データ内における同一位置のブロック画素毎に特徴ベクトルを時系列で並べて時系列ベクトルを生成する(S120)。その後、ブロック画素に移動体が写っている状態で得られる時系列ベクトルのサンプルを主成分分析して得られた主成分ベクトルに、時系列ベクトルを作用させて主成分毎の主成分得点を算出する(S130〜S150)。
(もっと読む)
261 - 280 / 2,719
[ Back to top ]