
Fターム[5B080AA00]の内容
イメージ生成 (11,603) | モデリング (2,056)
Fターム[5B080AA00]の下位に属するFターム
Fターム[5B080AA00]に分類される特許
21 - 40 / 120
非固定ズームカメラを用いた自由視点映像の合成画質高精度化方法およびプログラム
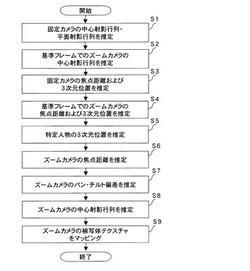
【課題】固定カメラ映像に加えて、パン・チルトおよびズーム・フォーカス値の変更を伴う非固定ズームカメラより取得される映像を併せて用いることで、特定の被写体に関する合成画質を向上させる。
【解決手段】自由視点画像を生成する方法は、1台以上の固定カメラが撮影した固定カメラ画像と、3次元位置およびパン・チルト・フォーカスの変更を伴う1台以上の非固定ズームカメラが撮影した非固定ズームカメラ画像から、非固定ズームカメラの中心射影行列を推定し、非固定ズームカメラ画像に含まれる被写体の3次元モデルを構築し、固定カメラ画像から自由視点画像を生成し、被写体の3次元モデルのテクスチャを、自由視点画像にマッピングする。
(もっと読む)
画像処理装置およびその方法

【課題】 光線追跡法を用いて画像を描画する際に、処理時間を抑えて、より写実的な描画結果を得る。
【解決手段】 オブジェクトの屈折特性および/または反射特性に基づき、光線追跡法の追跡対象として光、分光、および、チャネルの何れを用いるかを決定する(S701-S703)。そして、仮想三次元空間における視点から光源まで、決定した追跡対象の少なくとも一つの要素を追跡して、オブジェクトを示す画像データの画素値を決定する(S704)。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】3次元画像に対する違和感を減少させた付加情報の重畳表示を実現する装置や方法を提供する。
【解決手段】3次元画像に重畳させて、予め規定した規定奥行き位置に付加情報を表示する処理を行うとともに、付加情報の表示予定領域に含まれる表示オブジェクトの奥行き位置と、付加情報を表示する規定奥行き位置との差分に基づく評価値を算出し、算出した評価値の値に応じて、付加情報の表示態様の変更処理を実行する。例えば、文字数の削減、文字サイズの変更、アイコンへの変更、あるいは改行の設定などを行う。また、付加情報の表示切り替え条件の発生からの経過時間等を計測するタイマーを設け、タイマーの計測情報に応じて表示切り替え制御を実行する。
(もっと読む)
情報処理装置およびその方法
【課題】 積層構造をもつ板状の部品から形成される構造物の三次元形状を効率的に作成する。
【解決手段】 三次元構造物の二次元展開図データを取得する(S101)。波状形状を有する内部部材を含む積層構造を有する板状部品の層構成情報、および、二次元展開図データが示す折曲部の折曲情報を入力する(S102)。二次元展開図データの座標に対して、内部部材の形状が変化しない方向を示す主軸方向を設定する(S103)。二次元展開図データが示す各面に、層構成情報および主軸方向を表す情報を付加する(S104、S105)。二次元展開図データおよび折曲情報を用いて、三次元構造物の三次元形状を作成する(S105)。そして、各面に付加された層構成情報および主軸方向を表す情報を用いて、三次元形状が示す各面に、板状部品の積層構造の形状を付加した三次元モデルを作成する(S106)。
(もっと読む)
画像形成装置
【課題】 従来のRIPのエッジ処理は、エッジが垂直(X座標が不変)であっても、各Y座標でX座標の計算を行っていた。そのためエッジのX座標計算に不要な時間が掛かっているという第1の課題がある。また、エッジ開始とともにエッジ処理で使用するメモリを逐次確保し、終了とともにメモリを逐次解放することを行っていた。そのため、メモリ領域が離散的に使用されキャッシュ効率が悪いという第2の課題がある。
【解決手段】 第1の課題を解決するために中間データからエッジを読み込むときに、エッジのX座標の変化量から垂直エッジか否かを判断し、垂直エッジと判断されたら、通常のエッジとは別にして管理する。第2の課題を解決するために中間データからエッジを読み込むときに、エッジのペアを検出する。エッジのペアを検出したら、エッジのペアの更新情報をまとめて一つの構造体で管理する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】奥行き感を確保しつつ、線を消失することなく描画する。
【解決手段】正変換行列描画処理部113は、第2のピクセル群に対して逆アフィン変換を施すことにより、前記第2のピクセル群に対応するアフィン変換前の第1のピクセル群を算出し、それらの第1のピクセル群のデータに基づいて第2のピクセル群を描画する。逆変換行列描画処理部112は、第1のピクセル群のうち、描画処理に用いられなかったデータに対応する第1のピクセルにアフィン変換を施すことにより、第1のピクセルに対応する第2のピクセル群を算出する。そして、逆変換行列描画処理部112は、第1のピクセルのデータに基づいて、算出された第2のピクセル群を描画する。
(もっと読む)
AdobeFlash(登録商標)によるSWF形式の画像表現をHTML形式の画像表現に変換するコンピューター情報処理の方法、プログラム
【課題】Adobe Flash(登録商標)により作成されたSWF形式の画像表現をHTML形式の画像表現にコンピューターにより自動変換する。
【解決手段】緑領域と赤領域の境界線である「方向付き線」9と10には、右側「塗りスタイル」(赤色)と左側「塗りスタイル」(緑色)の両方の記述が対応付けされている。「方向付き線」9と10をそれぞれ9a・9bおよび10a・10bに二重化したのに伴い、その一方の「方向付き線」9aと10aに左側「塗りスタイル」(緑色)を対応付けするとともに、他方の「方向付き線」9bと10bに右側「塗りスタイル」(赤色)を対応付けする。
(もっと読む)
三次元データ処理装置、方法及びプログラム
【課題】三次元画像表示された対象物の視認性が向上する三次元データ処理技術を提供する。
【解決手段】三次元データ処理装置20は、対象物の表面に走査されたレーザの反射光を受光しその反射点の位置データの集合である点群データを生成する点群生成部21と、前記点群データ31の位置データにおけるピクセルの法線を導出する法線導出部22と、法線43に基づいてピクセルの輝度を演算する輝度演算部23と、ピクセルの前記位置データ及び前記輝度に基づいて対象物30の三次元画像を構成する3D画像構成部26と、を備える。
(もっと読む)
グラフィックスプロセッサ上の物理シミュレーション
【課題】グラフィクスプロセッサを提供すること。
【解決手段】本発明は、少なくとも1つのグラフィクスプロセッサユニット(GPU)上で物理シミュレーションを行うための、方法、コンピュータプログラム製品、およびシステムに向けられる。該方法は、以下のステップを含む。まず、少なくとも1つのメッシュに関連した物理属性を表すデータは、複数のメモリアレイに格納されることによって、シーンに描写される少なくとも1つのメッシュの運動を支配する線形方程式系を設定する。ついで、少なくとも1つのピクセルプロセッサを用いて複数のメモリアレイにおけるデータに演算が行われることによって、時刻に対する線形方程式系を解く。ここで、時刻に対する線形方程式系に対する解を表す変更されたデータは、複数のデータメモリに格納される。
(もっと読む)
グラフィックスプロセッサ上の物理シミュレーション
【課題】グラフィクスプロセッサを提供すること。
【解決手段】本発明は、少なくとも1つのグラフィクスプロセッサユニット(GPU)上で物理シミュレーションを行うための、方法、コンピュータプログラム製品、およびシステムに向けられる。該方法は、以下のステップを含む。まず、少なくとも1つのメッシュに関連した物理属性を表すデータは、複数のメモリアレイに格納されることによって、シーンに描写される少なくとも1つのメッシュの運動を支配する線形方程式系を設定する。ついで、少なくとも1つのピクセルプロセッサを用いて複数のメモリアレイにおけるデータに演算が行われることによって、時刻に対する線形方程式系を解く。ここで、時刻に対する線形方程式系に対する解を表す変更されたデータは、複数のデータメモリに格納される。
(もっと読む)
三次元仮想スライドを可視化するためのシステム及び方法
【課題】3D仮想顕微鏡スライド画像から3D画像化対象を検索、操作、閲覧するためのシステムと方法を提供する。
【解決手段】画像ライブラリモジュールは、3D仮想スライドの画像データへのアクセスを提供して、3D仮想スライドまたはその3Dサブ部分で同一空間に広がる3D画像化対象を作成する。3D画像化対象内から、3D仮想スライドのさまざまな奥行に及んでいるクロス層平面表示は、3D角柱および他の成形された像領域と同様に生成する。画像ライブラリモジュールは、3D画像化対象を水平および垂直表示にスライスすることができ、ユーザによる表示のためにクロス層表示、標準および不規則形の3D画像領域を歪曲することができる。
(もっと読む)
3次元画像生成装置
【課題】3次元画像データを生成するときの演算量を削減することができる技術を提供することを課題とする。
【解決手段】デジタルカメラ1は、複数の2次元画像データから3次元画像データ30を生成する。メモリカード20には、撮影画像データ21〜24と、撮影画像データ21〜24のそれぞれの撮影条件を示す撮影条件情報21A〜24Aが記録される。デジタルカメラ1において、空間情報生成部151は、撮影条件情報21A〜24Aを用いて、撮影画像データ21〜24の撮影空間を示す撮影空間情報21B〜24Bを生成する。使用画像選択部152は、撮影空間情報21B〜24Bに基づいて、撮影画像データ21〜23の撮影空間21D〜23Dが互いに重なることを確認する。使用画像選択部152は、撮影画像データ21〜23を、3次元画像データ30の生成に用いる使用画像データとして選択する。
(もっと読む)
3次元環境生成システム
【課題】大規模点群データのCGモデルへの置き換えを、少ない計算量及び少ない誤差で行う。
【解決手段】環境内の3次元形状を計測した反射強度付き点群データと、マーカ付き3次元CGモデル群を入力し、前記反射強度付き点群データから算出したマーカ配置と、入力したマーカ付き3次元CGモデル群のマーカ配置との照合処理により、類似配置のマーカを持つ3次元CGモデルを抽出するモデル候補抽出部と、反射強度付き点群データから算出したマーカ配置に、前記抽出マーカ付き3次元CGモデルのマーカをあわせることにより、最も照合誤差の少ない3次元CGモデルを該当3次元CGモデルとして、3次元環境モデルとして出力する点群-CG置換部、とを備える。
(もっと読む)
3次元データ生成装置、生成方法およびプログラム
【課題】フィッティング精度に優れる3DMMの特徴を維持しつつ処理時間を短縮する。
【解決手段】3次元データ生成装置は、複数の人の3次元顔データを学習データとして、人の顔を投影空間に投影したときの3次元形状を視点を変えながら複数生成して、3次元形状の各点の3次元座標を求め、顔の3次元座標と描画輝度のそれぞれについて主成分分析を行い、平均ベクトルと基底ベクトルとを求め、3次元形状と描画輝度のそれぞれが平均ベクトルおよび基底ベクトルとモデルパラメータとの線形和で表現される、人の顔のモデルを作成するモデル作成部1と、モデル作成部1が作成したモデルを入力画像中の人の顔と合うように変形させてフィッティングを行い、入力画像中の人の顔の3次元データを生成するフィッティング部2とを有する。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部106を備える。
(もっと読む)
画像処理装置およびその方法
【課題】非剛性の物体の動作モデルを高精度に生成する。
【解決手段】CPU101は、非剛性の物体に外力を供給するアーム装置203、および、物体を撮影するカメラ装置202を制御する。GPU104は、物体に対応する動作モデルを用いて、物体に所定の外力を加えた場合の物体の形状を表すコンピュータグラフィクス(CG)を描画する。CPU101は、アーム装置203により物体に所定の外力を加えて、カメラ装置202から物体を撮影した画像を取得し、画像とCGの比較、および、動作モデルの外力に対する動きを規定するパラメータの調整により、動作モデルのパラメータを設定する。
(もっと読む)
画像生成プログラム、画像生成装置、画像生成システム及び画像生成方法
【課題】本発明の目的は、一つのオブジェクトが他のオブジェクトに追従したり、他のオブジェクトを運ぶ等のようなオブジェクトが共に移動するときに、二次元インポスターを用いて効果的に三次元のような効果を達成することである。
【解決手段】共通の二次元インポスターや動画スプライトが二次元的に複数のオブジェクトの画像及び動画を生成するために使用される。複数のオブジェクトが空間において離れているときに、各オブジェクトがそれぞれの三次元モデルで表される。しかしながら、複数のオブジェクトが互いに接触しているとき、同じ場所に位置するとき、又は互いに近接しているときには、複数のオブジェクトを表すために複数の三次元モデルの使用から二次元モデルの使用へと切り替えられる。
(もっと読む)
多関節オブジェクトモデルのポーズを推定するためのコンピュータ実行方法、仮想画像をレンダリングするためのコンピュータ実行方法、およびソース画像セグメントのセグメント化を決定するためのコンピュータ実行方法
【課題】半自動のデータ駆動型方策を提供する。
【解決手段】多関節オブジェクトモデルのポーズを推定するためのコンピュータ実行方法であって、ソース画像セグメントを参照シルエットと比較し、参照シルエットごとに、参照シルエットがソース画像セグメントにどれほどよくマッチしているかを示すマッチングエラー、および/または参照ポーズが、先行のソース画像10から推定して、同一の実世界オブジェクト14のポーズとどれほど整合しているかを示す一貫性エラーを考慮することによって、参照シルエットを選択するステップと、多関節オブジェクトモデルの対応の参照ポーズを取出すステップと、選択された参照シルエットの参照ポーズから、多関節オブジェクトモデルのポーズの推定値を計算するステップとを備える。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】精度良い3Dモデルを効率良く得ることを可能にする。
【解決手段】撮像制御部21は、投影装置13が動作していない状態と投影装置13が対象物体に所定のドットパターンを投影している状態とで、撮像装置12に対象物体を撮像させて、テクスチャ画像のデータ、第1ドット画像のデータと第2ドット画像のデータの複数の組からなる複数の3Dモデル画像セット候補を取得する。3Dモデル画像セット選抜部25は、複数の3Dモデル画像セット候補に含まれる複数の撮像画像のデータのうち、移動量の総和が最も小さくなるテクスチャ画像並びに第1ドット画像及び第2ドット画像の組を、3Dモデル画像セットとして選抜する。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】パーティクルに対して比較的軽い描画負荷で被写界深度によるぼかしを再現することが可能なプログラム、情報記憶媒体及び画像生成システムを提供すること。
【解決手段】所与のパーティクルをオブジェクト空間の所与の位置に生成し、仮想カメラとパーティクルとの仮想カメラの視線方向の距離情報を算出し、パーティクルの位置に応じたぼかし量を計算し、距離情報に基づいてパーティクルの位置が所与のぼかし対象範囲内にあるか否かを判定し、ぼかし対象範囲内にある場合はぼかし量に応じたパーティクルのぼかし画像を生成する。
(もっと読む)
21 - 40 / 120
[ Back to top ]