
Fターム[5C054CG07]の内容
閉回路テレビジョンシステム (47,623) | 撮像装置の駆動機構の駆動制御 (887) | 関心領域への指向 (770) | 指向のための制御信号 (547) | センサ出力 (133)
Fターム[5C054CG07]に分類される特許
41 - 60 / 133
車両用表示装置
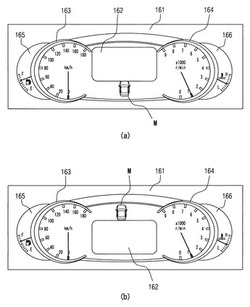
【課題】車両と撮像画像との位置関係を容易に判断することができる車両用表示装置を提供すること。
【解決手段】制御回路110は、後方カメラ132にて車両周辺を撮像する。そして、制御回路110は、自車両と表示パネル161に表示する後方カメラ132にて撮像された撮像画像との位置関係をわかりやすくするために、目印画像Mの撮像方向に対応する位置に撮像画像表示部162を設定し撮像画像を表示する。すなわち、目印画像Mの後方に撮像画像表示部162を設定し後方カメラ132による撮像画像を表示する。
(もっと読む)
ネットワークカメラ

【課題】撮像した画像からなる画像データと該画像に関連した画像情報データとを同時に送信することができ、送信された画像データと画像情報データとを容易に分離することができるネットワークカメラを提供する。
【解決手段】ネットワークカメラ10は、カメラ部13と、制御部14と、内部センサ15と、出力部16とを備えたカメラ本体11と、カメラ本体を支持するパン・チルト方向に回動可能な雲台12とからなる。また、ネットワークカメラには外部センサ17及び外部マイク18が接続され、ネットワーク30を介して、サーバ35及び監視モニタ端末装置36に接続されている。ここで、カメラ部で撮像された画像から画像データを形成すると共に、制御部で画像に関連する画像情報データを形成する。画像情報データ及び画像データはXML形式で変換され、画像情報データ内に画像データを埋め込み、一体化された転送用画像データとしてサーバに送信される。
(もっと読む)
情報処理装置
【課題】 話者を自動で検知して映像を切り替えるTV会議システムでは、話者が変わるたびにパン・チルトの動作が起こり、見ている側に不快な印象を与える。また自動で検知した方向に話者がいない場合、不要な映像が表示されることがある。
【解決手段】 話者の音声の発生方向を検知する手段と、検知した方向にカメラの撮像方向を変更する手段と、撮像された画像内に人物が含まれるか否かを判定する手段と、撮像方向変更および人物判定中には、撮像方向変更前の静止画像の映像を送信し、人物判定に失敗した場合には撮像方向変更前の撮像方向に戻し、成功した場合はそのままの撮像方向でリアルタイムの映像の送信を開始する手段を設ける。
(もっと読む)
物体検知装置
【課題】侵入物体の検知における誤報を無くす。
【解決手段】侵入物体を検出するための画像および信号取得装置として、感度波長の異なる複数の入力装置を用い、それらの少なくとも2つ以上の情報を協調処理する検知システムにおいて、一つの入力装置からの入力を処理して得られる物体検出位置若しくは物体サイズに基づき、他の入力装置からの入力を処理すべき領域範囲を限定する。そして1つ以上の処理結果に基づいて、侵入物体の有無を判断する。
(もっと読む)
レーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法
【課題】侵入者の存在有無および侵入者の位置を正確に把握することができるレーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法が開示される。
【解決手段】レーザ距離測定機を用いた保安システムは、レーザ光を放出して反射して戻ってきたレーザ光を受信して目標物との距離を測定し、侵入者の存在有無および侵入者の位置を検出するレーザ距離測定機と、放出されたレーザ光をレーザ距離測定機に反射する少なくとも1つの反射手段とを備え、少なくとも1つの反射手段は、レーザ距離測定機から所定の距離離隔した位置でレーザ距離測定機の誤差距離だけ離隔して設置されることを特徴とする。したがって、レーザ距離測定機の誤差距離を考慮して反射手段を設置することで、侵入者の存在有無および侵入者の位置を正確に把握することができる。
(もっと読む)
監視装置
【課題】カメラを複数台設置することなく、また全方位レンズとその歪み補正処理を必要とすることなく全方位にわたる常時監視を可能にする。
【解決手段】12個のミリ波センサを用いて監視エリアの全方位にわたりミリ波の送受信による移動物体の常時監視動作を行う。そして、このミリ波センサを用いた常時監視動作により解析部43で移動物体が検出された場合に、当該移動物体の位置の検出情報をもとにテレビジョンカメラ1の撮像方向と倍率を撮像方向・倍率制御部44により制御して移動物体がテレビジョンカメラ1の視野に収まるように設定し、この状態でテレビジョンカメラ1により上記移動物体を撮像してその映像信号を表示ユニット5に表示する。また、上記解析部43による検出結果をもとに、移動物体が検出された旨のメッセージと移動物体の位置を表す情報を生成して、これらの情報を併せて表示ユニット5に表示する。
(もっと読む)
車両用画像処理装置
【課題】車両に搭載されて互いに所定間隔離れた位置に設置された複数の撮像手段を設け、この撮像手段の光軸を調整する光軸調整手段と撮像手段から得られた画像を処理する画像処理手段とが備えられた制御手段を設けた車両用画像処理装置において、車両走行状態に応じた画像を表示させ、運転者の様々な要求に、他の撮像手段を追加することなく答えさせることにある。
【解決手段】画像処理手段は、光軸調整手段を用いて少なくとも複数の撮像手段により撮影された画像をステレオ画像として処理するステレオ画像処理モードと、複数の撮像手段により撮影された画像を夫々別々の画像として処理する単眼画像処理モードとを備えている。
(もっと読む)
撮像装置
【課題】
1台のカメラで複数のカメラの操作を行うこと、および、複数のカメラ映像を同時にモニタ出力することで、各カメラの操作性を向上させること。
【解決手段】
カメラに制御信号通信部および映像・音声信号通信部を搭載する。撮影者の操作するメインカメラでは、撮影者の行ったパン・チルト・ズーム・記録・再生などのカメラ駆動や操作制御情報を取得し、これを制御信号通信部を介してサブカメラへ送信する。サブカメラは、受信した制御信号を自身に反映することでカメラを動作させる。また、サブカメラは、映像・音声信号通信部を介して、自身の撮影映像をメインカメラへ送信する。これにより、撮影者は、サブカメラの撮影映像を見ながら操作ができる。この時、1台以上のサブカメラの映像を受信し、各映像を同時にモニタ出力することで、各カメラの映像を同時に確認することが可能となり、使い勝手が向上する。
(もっと読む)
テレビジョン受像機
【課題】室内においての防犯を実現できる防犯機能を付加したテレビジョン受像機を提供する。
【解決手段】テレビジョン受像機において、主電源がオフされた後、リモコンの監視開始キーの押下が検知されたとき、または携帯電話機の操作によるネットワークからの監視開始指令が検知されたとき、監視モードに設定される。監視開始キーの押下の検知により監視モードに設定されたとき、所定時間経過してからセンサが起動され、または監視開始指令の検知により監視モードに設定されたとき、センサが起動される。センサの出力信号が変化したとき、主電源がオンされる。主電源がオンされた後、カメラが駆動され、侵入者が撮影される。また、センサの出力信号が変化したとき、音声が最大音量でスピーカから出力される。したがって、低価格でホームセキュリティを実現することができる。
(もっと読む)
撮像システム
【課題】撮像システムにおいて、旋回動作中でも適切な防振動作を行う。
【解決手段】撮像システム100は、画像の振れを抑制する動作を行う防振動作部104〜106を備えた撮像装置101と、振れに応じた信号を出力する振れ検出手段107と、該振れ検出手段からの信号のうちカットオフ周波数以下の周波数成分をカットするフィルタ114aと、該フィルタを通過した周波数成分に基づいて防振動作部を制御する防振制御手段114bと、撮像装置を旋回させる旋回機構110,112とを有する。防振制御手段は、旋回機構が動作する場合は、動作しない場合に対してカットオフ周波数を変更する。
(もっと読む)
監視装置及び監視システム
【課題】好適な監視記録を行うことができる監視装置及び監視システムを実現する。
【解決手段】監視装置10は、撮像部1により撮像された監視領域Rの映像処理を行うようにして検出した所定の発光パターンに基づき撮像範囲情報を取得して、撮像部1の撮像範囲を切り替える。そして、監視装置10は、その切り替えた撮像範囲に対応する領域をより詳細に撮像部1によって撮像することで、その監視領域Rの監視や、その領域の映像の記録を可能にする。
(もっと読む)
車両用撮影装置
【課題】車両に設けられて車内や車両周辺を撮影する車両用撮影装置において、所望の領域を確実に撮影できるようにする。
【解決手段】車両への不正行為を検知すると共に、その不正行為を受けた箇所を検出する車内異常検出用センサ40からの信号に基づき、制御ECU30が異常(不正行為)有りと判定すると、その制御ECU30は、カメラ駆動用アクチュエータ20を駆動することで、車内撮影用カメラ10の向きを異常が検出された箇所に向ける。また、車内撮影用カメラ10を起動して、その異常が検出された箇所を含む領域をその車内撮影用カメラ10撮影させる。これにより、異常が検出された箇所を確実に撮影できるようになる。このため、例えば、車両に不正行為をはたらいた第三者をより確実に撮影できるようになる。
(もっと読む)
車両用監視装置
【課題】運転状況の記録や盗難防止対策を含む駐車異常の記録など、複数の機能を省スペースでかつ安価に搭載する。
【解決手段】車室内に設けられた撮影手段(カメラ20)と、撮影手段(20)によって、車室外の車両進行方向の視界を撮影可能とするとともに、車室内を撮影可能とする回転駆動手段(駆動モータ21)と、撮影した画像を記憶する記憶手段(メモリ部23)と、車両1の駐車時には車室内を撮影させ、運転時には車室外の車両進行方向の視界を撮影させる制御手段(マイコン33)と、を備えた構成とする。また、エンジンの始動意思を検出する始動意思検出手段(スタートスイッチ8)を設け、制御手段(33)は、始動意思を検出すると、撮影手段(20)によって乗員の顔画像を撮影し、予め登録されたユーザ顔画像と照合して認証した場合に、エンジンの始動を許可する。
(もっと読む)
撮影範囲調節装置、撮影範囲調節方法及びコンピュータプログラム
【課題】運転者の体格とシート位置に適応して、正しく顔画像を撮影できる撮像装置の撮影範囲を調節する。
【解決手段】顔画像を取得するカメラ3の撮影する範囲を調節する顔画像撮像装置1であって、コンピュータ2は、カメラ3が取得する顔画像から、所定の顔特徴点を検出する。コンピュータ2が検出した顔特徴点の位置の、カメラ3の撮影する範囲に対する相対位置が所定の位置になるように、カメラ3の撮影する範囲を変更するカメラ姿勢制御装置4を備える。好ましくは、コンピュータ2は、顔画像から鼻孔を検出し、カメラ姿勢制御装置4は、カメラ3の撮影する範囲に対する鼻孔の位置の相対位置が所定の位置になるように、カメラ3の撮影する範囲を変更する。チルト角度制御装置5でステアリングホイール6のチルト角度を調節して、カメラ3の撮影範囲を調節してもよい。
(もっと読む)
ある環境において物体の移動をモデル化するためのシステムおよびコンピュータにより実施されるその方法
【課題】本発明の方法及びシステムは、モデルを追跡して、ある環境において物体移動を予測する。
【解決手段】一組のセンサにより感知された時間的及び空間的に隣接する一連のイベント同士を関連づけて、一組のトラックレットを形成する。各トラックレットは、関連づけられた開始及び終了位置を有する。トラックレットは、エッジにより接続された開始ノード、終了ノード及び中間ノードを含む有向グラフを作成するために使用される。中間ノードは、トラックレットが異なるトラックに分岐するスプリットノードでもよく、また複数のトラックレットが単一の通路に収束するジョインノードでもよい。その環境における物体の移動をモデル化して予測するために、確率がエッジに割り当てられる。
(もっと読む)
監視データベースを使用して物体を追跡するためのシステムおよびコンピュータにより実施されるその方法
【課題】本発明の方法及び装置は、一組のセンサにより取得されたイベントと一組のカメラにより取得された一連の画像とを保存する監視データベースを用いて物体を追跡する。
【解決手段】一組のセンサで感知された時間的、空間的に隣接する一連のイベントは、一組のトラックレットを形成する。各トラックレットは、トラック‐スタート、トラック‐ジョイン、トラックレット‐マージ、トラックレット‐エンドノードの何れかである終点を有する。センサのサブセットが選択され、サブセットに関連するトラックレットのサブセットが識別される。単一の開始トラックレットが選択され、開始トラックレットに時間的、空間的に隣接する一連のトラックレットが集められ、トラックレットグラフを作成する。トラック‐ジョインノードとトラック‐スプリットノードは、その環境におけるその物体のトラックを判別するために、曖昧さを除かれそのトラックグラフから除去される。
(もっと読む)
通信装置、その制御方法及びプログラム
【課題】撮像部と着脱可能に構成された映像通信装置を、オフラインで利用する際の不便を解消する。
【解決手段】撮像部110と着脱可能に構成された通信装置101であって、ネットワーク経由の操作コマンドに従って動作するリモート操作モード動作手段と、前記通信装置101自体の自立的な処理結果に従って動作する自律モード動作手段と、リモート操作モード動作と自律モード動作とを切替える動作モード切替手段とを備えるものである。
(もっと読む)
監視システム
【課題】自動取引装置で不審事象が起きた可能性が有る場合に係員に注意を促すための手段を提供する。
【解決手段】顧客監視装置6は顧客検知通知と顧客検知無通知とを監視サーバ10に送信し、自動取引装置1は取引開始通知と取引終了通知を監視サーバ10に送信し、監視サーバ10は占有時間と操作時間とを計測して、それぞれの時間が不審事象判定情報の規則に該当する場合に不審事象が起きた可能性が有るとして監視端末16に不審事象発生通知を送信し、監視端末16は過去の映像と現在の映像とを並べた警告画面を表示する。
(もっと読む)
監視カメラ、監視カメラの制御方法および監視カメラシステム
【課題】監視カメラが、サーバの負荷状態に影響されることなく、また、サーバに負担を掛けずに、他の監視カメラから出力されるメタデータに応じた動作を行うようにする。
【解決手段】固定型のIPカメラ102は、動体検知、不動体検知あるいはセンサ入力検知に伴って、検知情報を含むメタデータを、ネットワークに送出する。PTZ型のIPカメラ103は、IPカメラ102からネットワーク101に送出されたメタデータを受信する。IPカメラ103は、受信したメタデータに基づいて、予め予約された動作を行う。IPカメラ103は、IPカメラ102から出力されたメタデータに対応したコマンドを、サーバ104を経由して受け取るものではなく、例えば、IPカメラ102が異常検知(動体検知、不動体検知あるいはセンサ入力検知)を行ってから異常領域の高解像度の画像データを取得するまでの時間を短くできる。
(もっと読む)
運転支援装置、運転支援システム、および運転支援方法
【課題】運転支援のために必要な領域の俯瞰画像を、画像処理によって制御部の処理負荷を増大させることなく、運転支援のために必要なタイミングにおいて安定的に、ドライバに案内することが困難であった。
【解決手段】自車両に搭載され、撮像部を備える画像撮影ユニットを当該撮影部とその撮影対象との位置関係に基づいて制御して、前記自車両の上方から前記撮影対象を撮影するための撮影位置に配置し、撮影部が撮影した画像を取得し、取得した画像を表示する。
(もっと読む)
41 - 60 / 133
[ Back to top ]