
Fターム[5C054CG07]の内容
閉回路テレビジョンシステム (47,623) | 撮像装置の駆動機構の駆動制御 (887) | 関心領域への指向 (770) | 指向のための制御信号 (547) | センサ出力 (133)
Fターム[5C054CG07]に分類される特許
21 - 40 / 133
画像判定装置
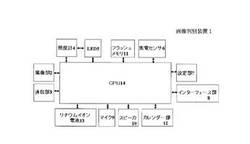
【課題】対象者のプライバシを確保するとともに、簡単な構成で対象者の状態を判別すること。
【解決手段】第1方向から画像を撮像する撮像装置(2)と、第1対象者の高さ情報および第2対象者の高さ情報を入手する入手装置(2、7、14)と、前記撮像した画像に前記第1対象者と前記第2対象者との少なくとも一方が含まれている際に、前記入手装置からの高さ情報に応じて、前記第1対象者と前記第2対象者とを識別する識別装置(14)と、を備えている。
(もっと読む)
時系列データに基づいてカメラを方向付けるための方法及びシステム

【課題】時系列データに基づいてカメラを方向付けるためのシステムおよび方法を提供する。
【解決手段】指定されたアトミックアクティビティーの時空間的パターンを与えるステップであって、該時空間的パターンは前記アトミックアクティビティーの時間及びロケーションのみに基づき、それによって前記アトミックアクティビティーの時空間的シーケンスが指定されたプリミティブアクティビティーを形成し、与えるステップと、時系列データにおいて、結果を生成するために、前記時空間的パターンに対応する検知されたプリミティブアクティビティーを検出するステップと、前記結果に基づいてカメラを方向付けるステップとを含む。
(もっと読む)
監視システム
【課題】画像記憶装置の操作、破壊、盗難を抑止する監視システムを提供する。
【解決手段】ネットワークに接続されカメラで撮影された画像データを取得する画像記憶装置と、画像記憶装置の画像データを閲覧する端末とを備えた監視システムを用いる。この監視システムの画像記憶装置は、画像記憶装置の周囲又は画像記憶装置内部から外側を撮影する副カメラ部を備える。また、画像記憶装置の揺れを検出する振動センサ、筐体の開閉を検出する開閉センサを備える。さらに、停電時に電源バックアップする無停電電源装置を備える。この上で、平常時には主カメラ部の画像データを記憶部に記憶し、振動センサ、前記開閉センサ、無停電電源装置により異常を検出した場合には、副カメラ部によって前記画像記憶装置周辺の状況を撮影する。また、副カメラ部によって前記画像記憶装置を開閉した人物などの対象を撮影し、端末に送信する。
(もっと読む)
複数のカメラの相対制御のための方法及び装置
【要約】 一態様において、本発明は、スポーツイベントの映像を撮影するために複数のカメラを制御する装置及び方法を提供する。移動被写体の動画像を得る方法は、第1動画カメラを用いて、前記被写体の動的な主画像を撮影する工程と、第2動画カメラを用いて、前記主画像の周りに延在する動的なハロー画像を撮影する工程を含み、前記動的なハロー画像内の前記動的な主画像の位置を変更可能である。ターゲットの被写体に適合する主画像を撮影する少なくとも1つの第1カメラと、より広い視野を有する第2カメラによって撮影されるハロー画像の使用により、単独のオペレータが単純かつ効果的にテレビ放送の構成を制御できるようになる。  (もっと読む)
(もっと読む)
撮像装置、撮像方法、プログラム、及び撮像システム
【課題】デジタルカメラ間での遠隔撮影において、複数のユーザからの撮影のリクエストを正確に把握するのが困難である。
【解決手段】撮像装置間での通信機能を有し、相互に遠隔操作が可能である操作側機能と被操作側機能とを共に備えた撮像装置であって、前記操作側機能は、撮影する被写体の位置を示す被写体位置情報を指示する被写体位置指示手段と、前記被写体位置情報を含む撮影依頼情報を前記被操作側の撮像装置へ送信する撮影依頼送信手段とを有し、前記被操作側機能は、前記操作側の撮像装置により送信された複数の前記撮影依頼情報を受信する撮影依頼受信手段と、前記撮影依頼受信手段にて受信した前記撮影依頼情報を表示する撮影依頼表示手段とを有する。
(もっと読む)
監視画像記録装置
【課題】カメラが監視対象の移動方向及び移動速度に対応して監視対象を撮影することができ、監視を行うために必要な画像を記録する。
【解決手段】監視対象を撮影するための旋回可能なカメラ2と、カメラ2により撮影された画像を記録する画像記録部7と、監視対象を検出する複数のセンサ9と、複数のセンサ9が監視対象を検出した時間差及び監視対象を検出した複数のセンサ9の順序に基づいて、カメラ2の旋回速度を含む動作を制御する信号処理部10とを備える。
(もっと読む)
データ処理装置及びデータ処理方法及びプログラム
【課題】ドライブレコーダにおいて、補正用の器具を用いることなく、高精度に加速度値の補正処理ができる構成を実現する。
【解決手段】角度θの傾斜のある車両のフロントガラス50にドライブレコーダ本体100が取付けられ、車両が平地で停車している際に、ドライブレコーダ本体100内の加速度センサがx方向の加速度値xとz方向の加速度値zを計測し、ドライブレコーダ本体100は、計測した加速度値xと加速度値zと予め記憶している重力加速度値gとを用いて、取付け角度θを算出し、算出した取付け角度θに基づいて、x方向の加速度値xを車両の進行方向の加速度値に補正し、z方向の加速度値zを車両の鉛直方向の加速度値に補正する補正式を算出する。
(もっと読む)
バージ船押航遠隔監視システム
【課題】押船の位置情報、航海情報や固有情報の他に、周辺海上の波浪や風の画像情報、押航中のバージ船や積荷の画像情報をリアルタイムに把握可能なバージ船押航遠隔監視システムを提供する。
【解決手段】押船の操縦室以上の高さ位置に、バージ船やその周辺海上を撮像するカメラを据え付けるとともに、押船に船舶自動識別システムを搭載するようにしたので、押船の位置情報、航海情報や固有情報の他に、周辺海上の波浪や風の画像情報、押航中のバージ船や積荷の画像情報をリアルタイムに把握することができる。
(もっと読む)
車両の運転支援装置
【課題】画像情報に基づく運転者の支援を効率的に行う。
【解決手段】車両1が駐車場2で、後進して駐車する際に、カメラユニット10で撮像する画像を情報ディスプレイ4に表示し、運転支援を行う。カメラユニット10の視野10aは、運転者からは死角になる車体後部の下方に向けられる。撮像した画像は、駐車アシストECU6で処理され、白線3の認識や、ステアリング1aの操作に対応する進行予測曲線5の表示などが行われる。進行予測曲線5を撮像する実像に重ね合せて表示するので、判りやすい案内を行うことができる。
(もっと読む)
制御装置,監視システムおよびプログラム
【課題】監視空間における監視対象の移動を監視するに際し、監視に際しての制約の下で適切なセンサによる監視が行われるようにする。
【解決手段】各ノード4は、監視空間に存在するものとして同定した監視対象毎に、この監視対象を監視制約の下で監視するのに適した1以上のカメラ2を選定する(s160,s230)。そして、こうして選定されたカメラ2それぞれの検出領域を変位させて監視対象に追従させることにより(s250)、その監視対象を監視することができる。このように、各監視対象を監視するカメラ2として、監視制約の下で監視対象を監視するのに適したものを選定することができるため、監視制約の下で適切なカメラ2により監視対象の監視を行うことができる。
(もっと読む)
車体透過表示装置
【課題】表示部周囲の実景と自然につながった、運転者が楽に周辺画像を目視することのできる映像を提供する。
【解決手段】運転者50の視線方向であり、車両40を構成するフェンダー41によって運転者50の死角となる死角領域を撮影する第1カメラ11と、第1カメラ11の撮像映像をキャプチャーする映像入力部13と、第1カメラ11の画角と、運転者50の視野とをマッチングさせる視野角変換部14と、マッチング処理の行われた撮像映像を運転者50の視線に対して正対する映像に変換する射影変換部15と、運転者50の視線方向であり、死角領域を形成するフェンダー41上に配置された表示部30と、表示部30への画像表示を制御する表示制御部16を備える。
(もっと読む)
監視カメラシステム
【課題】複数の事象が重なって生じても重要な映像の表示や書き込み記録を自動的に行う。
【解決手段】複数の監視カメラ1−1〜1−nと、映像情報を書き込み記憶する映像記録装置3と、映像を表示する映像表示装置6と、複数の事象に対して、事象情報と当該事象の発生程度に応じたレベル情報と前記複数の監視カメラに対する重み情報とが対応付けられて記憶されたメモリテーブルと、報知される事象情報とそのレベルと前記メモリテーブルの情報とを用いて前記複数の監視カメラの優先度情報を算出する算出手段と、算出された各監視カメラの優先度情報に基づき、映像情報を前記映像記録装置3に書き込み記録する制御と共に、映像を前記映像表示装置6に表示する制御を行う制御手段とを具備する。
(もっと読む)
インターホンシステム
【課題】親機の使用による居住者の操作を不要として、子機のカメラのズーム駆動、パン・チルト駆動を適宜に行い、モニタに出画させる映像の視認性を高める。
【解決手段】子機1の筐体正面上における鉛直方向の高さ位置、水平方向の左右位置にそれぞれ対応させて複数の人感センサ101a、101b、101c、101d、101e、101f、101g、101hを備え、人体の存在を感知した当該センサに割り当てられる高さ位置及び/又は左右位置に対応させて親機2の親機制御部206が子機制御部107を制御し、カメラ102をズーム駆動及び/又はパン・チルト駆動させる。また、親機制御部は、複数の人感センサのうち同時のタイミングで人体の存在を感知した当該センサに割り当てられる高さ位置に対応させて子機制御部を制御し、カメラをパン・チルト駆動させる。
(もっと読む)
監視システム
【課題】監視場所において異常音が発生した場合に、複雑な設備や配線なしで監視カメラの向きを変え、効率的に監視を行う。
【解決手段】
撮影方向変更可能なカメラ101とマイク102と制御装置103と外部PC104からなり、マイク102から供給される音をPC104に送信し、その音データがPC104に予め登録された音データと一致した場合、指定したカメラ方向のデータをカメラ101に送信し、カメラ101がそのデータに基づき監視方向を変えるようにする。
(もっと読む)
インターホンシステム
【課題】 簡単な操作によって人感センサの感知方向(感知範囲)を最適に調整することができるインターホンシステムを提供する。
【解決手段】 人感センサ13の感知方向及びカメラ14の撮像方向をそれぞれ変更可能とし、センサカメラCPU12がそれぞれの方向を検出して人感センサ13の方向を変更制御し、人感センサ13の感知方向をカメラ14の撮像方向に向けさせる制御を実施する。居室親機3に設けた方向設定ボタン23bを操作することで、センサカメラCPU12はカメラ14の撮像方向に感知方向が向くよう制御し、カメラ14の撮像範囲を人感センサ13の感知範囲よりも広く設定して、モニタ24に感知範囲を表示させる。
(もっと読む)
監視カメラ及び監視システム
【課題】事故や事件、災害などの所定のイベントが同時に複数発生した場合に、これらのイベントを、好適に監視することができる監視カメラ及び監視システムを提供する。
【解決手段】SIPサーバ200と複数の監視カメラ300…とを備える監視システム1000において、監視カメラ300は、1つないし複数のグループにグルーピングされており、一のグループに所属する監視カメラ300は、制御カメラと被制御カメラとを含み、SIPサーバ200は、一のグループに所属する監視カメラ300の中から制御カメラとなる監視カメラを選択し、監視カメラ300は、イベントの発生を検知して、検知されたイベントの相対優先度を算出し、制御カメラは、算出された相対優先度に基づいて一のグループ全体でのカメラワークに関するカメラワーク情報を生成し、各監視カメラ300は、生成されたカメラワーク情報に基づいてカメラ部320の撮像領域を調整する。
(もっと読む)
監視装置及び監視システム
【課題】センサの検知時に、侵入者等の侵入物体に対してカメラを旋回して被写体を捉えるシステムであるが、カメラの旋回やズームに一定の時間を要するため、即座に侵入者を捉えることが困難であった。
【解決手段】侵入した人物の位置を検知する複数のセンサと、該センサによって検知された侵入した人物の位置に対して、上記制御部の制御に基づいて視野角を変更するカメラと、複数のプリセット位置を予め登録し上記複数のセンサから出力された位置座標に基づいて上記侵入した人物の移動予測を行い、かつ侵入した人物の移動方向から侵入した人物の顔の向きを算出し、前もって上記カメラの視野角を変更して追尾する制御部とを備えた。
(もっと読む)
操作表示装置
【課題】操作表示装置の利用効率を向上する。
【解決手段】表示部52の液晶ディスプレイ52aにウェブページWP1が表示されている状態で「ツール2」のボタンB2上でタッチパネルが操作されると、操作部53がタッチパネルの操作を受け付け、マイコン部50がメモリ部54若しくはメモリカード57に記憶されている画像(画像データ)を再生(表示)するためのウェブページWP2を読み出して表示部52の液晶ディスプレイ52aに表示させる。故に、メモリ部54やメモリカード57に記憶した画像をメモ代わりに使用し、必要なときに直ちに表示部52に表示させて視認することができ、操作表示装置CVを利用する機会が増えるために利用効率を向上することができる。
(もっと読む)
撮影装置、撮影方法
【課題】 この発明は、どの被写体を追尾し、どのように撮影するかを、ユーザ自身で選択可能にする、撮影装置を提供することを目的とする。また、この発明は、被写体の追尾を行いながら、ユーザ自身で、被写体の選択を可能にすることで、ユーザの利便性を向上させた撮影装置を提供することを目的とする。
【解決手段】 この発明に係る撮影装置10は、撮影中の被写体を表示する表示部(ディスプレイ18)と、特定の被写体の位置に係る情報を受信する位置情報受信手段(通信部14)と、受信した特定の被写体の位置情報に基づいて、当該撮影に係る特定の被写体の位置関係を演算する演算手段(位置関係解析部16)と、演算された位置関係に基づいて、当該撮影に対する特定の被写体の方向を、撮影中の被写体が表示されている表示部に表示する表示手段(ディスプレイ18)を、備えるように構成している。
(もっと読む)
カプセル内視鏡システム
【課題】患者体内でのカプセル内視鏡(CE)の動き量を正確に検出する。
【解決手段】CE11に、加速度を検出するCE加速度センサ42を設ける。患者10が身に付けるシールドシャツ15に装着されたアンテナ16に、加速度を検出する患者加速度センサ19を設ける。CE11から(受信装置12)レコーダ17へCE加速度を無線送信する。患者加速度センサ19の検出結果をレコーダ17に入力する。レコーダ17にて、CE加速度及び患者加速度を元に、患者10に対するCE11の相対動き量を検出する。患者10が動いた場合でも、患者10の動きとCE11の動きの違いを判別することができる。
(もっと読む)
21 - 40 / 133
[ Back to top ]