
Fターム[5F031FA07]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | 1枚(個)毎,枚葉式 (3,249)
Fターム[5F031FA07]に分類される特許
161 - 180 / 3,249
剥離装置および剥離方法
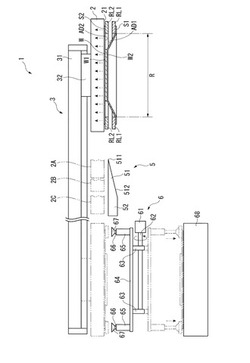
【課題】簡単な構成で処理能力を向上できる剥離装置および剥離方法を提供すること。
【解決手段】
剥離装置1は、第1面W1が第1接着シートS1の一方の面に貼付されてフレーム部材としての第1リングフレームRL1に支持されるとともに、第2面W2が第2接着シートS2の一方の面に貼付された板状部材としてのウェハWから第1接着シートS1を剥離するものであり、第2接着シートS2の他方の面側に接する支持面21で第2接着シートS2を支持する第2シート支持手段2と、第2シート支持手段2をウェハWの第1面W1と平行な方向に移動可能な移動手段3と、第1接着シートS1にウェハWから離間する方向に剥離力を付与可能な剥離力付与手段5と、第1接着シートS1が剥離されたウェハWを回収する回収手段6と、を備えている。
(もっと読む)
物体交換システム、露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び物体交換方法

【課題】基板ステージ上の基板の交換を迅速に行う。
【解決手段】基板ステージ20aは、基板ホルダ30aから加圧気体を噴出して基板P1を浮上させ、基板搬出装置93は、基板ホルダ30aの上面(基板載置面)をガイド面として基板P1を水平面に沿って移動させることにより基板ホルダ30aから搬出する。次に露光予定の別の基板P2は、基板P1の搬出動作が行われる際、基板ホルダ30aの上方に待機しており、基板P1の搬出動作完了後に基板ステージ20aが有する数の基板リフト装置46aに受け渡される。
(もっと読む)
突き上げピンの位置補正方法
【課題】ダイシングレーンあるいはダイと、突き上げ痕の位置関係を画像処理によって認識することにより、突き上げピンの中心とダイの中心とのずれ量を算出して、突き上げピンを位置補正するようにした突き上げピンの位置補正方法を提供する。
【解決手段】ダイシングレーン44およびダイ部品Pの少なくとも一方と、突き上げピン45による突き上げによって粘着シート43に形成された突き上げ痕48とを撮像装置25により撮像して画像処理し、ダイシングレーンおよびダイの少なくとも一方と、突き上げ痕の位置関係を画像処理によって認識することにより、突き上げピンの中心とダイ部品の中心とのずれ量を算出し、該ずれ量に基づいてダイ部品に対する突き出しピンの突き上げ位置を補正するようにした。
(もっと読む)
物体の搬出方法、物体の交換方法、物体保持装置、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法
【課題】基板ステージ上の基板の搬出を迅速に行う。
【解決手段】 基板ホルダ30aには、基板Pの搬送に用いられる基板トレイ40aを収容するX溝31xが形成されている。また、X溝31x内には、基板トレイ40aを押圧して基板トレイ40aと共に基板Pを移動させる基板搬出装置70aが設けられている。このため、基板Pに対する露光処理が終了した後、基板Pの交換のために基板ステージ20aを基板交換位置に位置させる前に基板Pの搬出動作を開始することができる。
(もっと読む)
基板載置装置および基板載置方法
【課題】空気の巻き込みによる基板の位置ずれを防止できる基板載置装置を提供する。
【解決手段】基板10を載置する基板載置装置100は、基板10を保持するステージ30と、ステージ30に設けられ、基板10を吸着する真空チャック31とを備える。真空チャック31は、ステージ30の表面30sに配列された吸着孔32を有しており、真空チャック31は、ステージ30の一端30aから他端30bに向けて基板10の吸着を実行する。
(もっと読む)
物体搬出方法、物体交換方法、物体保持装置、物体交換システム、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法
【課題】基板ステージ上の基板の交換を迅速に行う。
【解決手段】 基板ステージ20aは、基板ホルダ30aから加圧気体を噴出して基板P1を浮上させ、基板ホルダ30aに内蔵された基板搬出装置70aを用いて、基板ホルダ30aの上面(基板載置面)をガイド面として基板P1を水平面に沿って移動させることにより基板ホルダ30aから搬出する。このため、基板P1に対する露光処理が終了した後、基板交換のために基板ステージ20aを基板交換位置に位置させる前に基板P1の搬出動作を開始することができる。次に露光予定の別の基板P2は、基板P1の搬出動作が行われる際、基板ホルダ30aの上方に待機しており、基板P1の搬出動作完了後に基板ステージ20aが有する数の基板リフト装置46aに受け渡される。
(もっと読む)
半導体パッケージ及び搬送システム
【課題】半導体パッケージを傷つけることなく安定した状態で確実に持ち上げて搬送でき、また、半導体パッケージを搬送する搬送装置の製造コストや維持費も低く抑えることができるようにする。
【解決手段】半導体チップ4を含む板状のパッケージ本体2を備え、当該パッケージ本体2の側部に、パッケージ本体2の板厚方向に段差が形成されることで、搬送用の治具100をパッケージ本体2の板厚方向の一方側から当接させる支持用段差部8が画成され、この支持用段差部8が、少なくとも平面視したパッケージ本体2を側部から挟み込むような位置に形成された半導体パッケージ1を提供する。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体及び基板処理システム
【課題】基板を露光処理する前に、各種の処理モジュールにより基板に各種の処理を行う際に基板に発生した塵埃が、露光装置の基板保持機構の接触部に付着することを防止できる基板処理方法を提供する。
【解決手段】回転可能に保持した基板に形成されている切欠部の回転角度位置が基準位置から所定範囲内になるように位置合わせする位置合わせ工程と、位置合わせされた基板を所定の処理を行う基板処理部23に搬送し、基板処理部23に設けられた第1の接触部82と接触させることによって基板を保持する第1の保持工程と、基板に所定の処理を行った後、基板を露光装置に搬送し、露光装置に設けられた第2の接触部と接触させることによって基板を保持する第2の保持工程とを有する。第1の接触部82は、回転角度位置が所定範囲内のとき、基板が第1の接触部82に接触する領域が、基板が第2の接触部に接触する領域と重ならないように設けられている。
(もっと読む)
基板浮上型搬送機構用スリットコート式塗布装置
【課題】空気浮上搬送方式に好適なスリット状開口部の清浄化機構を備えたスリットコート塗布装置を提供することを課題とした。
【解決手段】エアー噴出装置から噴出するエアーによって浮上した状態でスライダーにより所定方向に移動する基板に対し、スリット状開口部から塗布液を吐出して基板上に塗布層を形成する基板浮上型搬送機構用スリットコート式塗布装置であって、前記塗布装置は、少なくとも、スリット状の開口部を備える塗布ヘッドと、前記塗布ヘッドを略上下方向に移動させる塗布ヘッド移動機構と、前記エアー噴出装置から噴出するエアーによって浮上した状態でスライダーにより所定方向に移動する拭き取り機構と、を備え、前記拭き取り機構は、ゴムパッドがスリット状の開口部に当接したまま開口部に沿って移動することでスリット状開口部を洗浄する機構である。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
基板のプラズマ処理方法
【課題】プラズマ処理中に基板の縁部およびトレイに付着した副生成物の除去を行って、製品の品質を向上させる。
【解決手段】基板が収容される複数の基板収容孔が設けられ、基板収容孔の内壁から突出する基板支持部を有するトレイを基板ステージのトレイ支持部上に載置するとともに基板保持部上に基板を載置して、基板保持部の端縁よりはみ出した基板の縁部と基板支持部とを離間させる基板載置工程と、トレイおよび基板が基板ステージ上に載置された状態にて、チャンバ内を減圧するとともに処理ガスを供給し、基板に対するプラズマ処理を行う第1プラズマ処理工程と、チャンバ内を減圧するとともに処理ガスを供給してプラズマ処理を行い、第1プラズマ処理工程により基板の縁部と基板支持部とに付着した副生成物を除去する第2プラズマ処理工程とを実施する。第2プラズマ処理工程は、副生成物の基板保持部への付着を抑制する位置までトレイを上昇させて行う。
(もっと読む)
基板の保持容器、基板の保持方法および保持容器を用いた太陽電池モジュールの製造方法
【課題】ペーストと保持容器との接触によるペーストのパターン不良が発生することなく、公差を含む基板を保持することが可能な保持容器を提供する。
【解決手段】基板20の保持容器10は、対向する少なくとも1組の側面102,103を有する基板の保持容器であって、1組の側面の間の距離が下方に向かって狭まるように傾斜しており、側面の内側が、基板の端辺202〜205と当接することによって、基板を保持する。保持容器を用いることにより、公差を含む基板の端までペースト30を載置するパターンを用いることが可能となった。
(もっと読む)
ウェハキャリア用治具
【課題】手動にて、ウェハをウェハキャリアに収納する場合もしくはウェハキャリアから取り出す場合において、ウェハ同士の接触を防ぎ、疵やチッピングの発生を防止する。
【解決手段】ウェハキャリア用の治具であって、ウェハキャリア11が備える複数のスロット12の数に対応し、スロット12の並び間隔と等しい間隔で平行な状態で固定されたウェハ保護プレート群20からなり、各ウェハ保護プレート21は、スロット12内に収納されるウェハ10の直径以下の幅を有しスロット12に差し込まれる挿入部22と、挿入部22の幅方向に延びてスロット12の開口面15に接する一対のストッパー部23とを有し、挿入部22が隣り合うウェハ10同士の接触を防ぎ、疵やチッピングの発生を防止することを特徴とするウェハキャリア用治具1。
(もっと読む)
浮上搬送装置及びローラ駆動ユニット
【課題】挿入ギャップGを越えて後続の浮上ユニット15側へ乗り継ぐ際に、基板Wの端部と後続の浮上ユニット15等との干渉を回避すること。
【解決手段】ユニットケース21内の上部に一対の搬送ローラ27が搬送方向に離隔して設けられ、ユニットケース21内の下部に一対の搬送ローラ27を回転させる搬送モータ29が設けられ、ユニットケース21の下面に設けられた吸引ファン41の吸引中心位置は、一対の搬送ローラ27の間で基板Wを凹状に変形させるように搬送方向における一対の搬送ローラ27の中間位置に設定されていること。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、被処理基板の非接合面の酸化を抑制する。
【解決手段】剥離装置30は、加熱機構128を備え、且つ被処理ウェハWを保持する第1の保持部110と、加熱機構151を備え、且つ支持ウェハSを保持する第2の保持部111と、少なくとも第1の保持部110又は第2の保持部111を相対的に水平方向に移動させる移動機構170と、第1の保持部110の外周部に沿って環状に設けられ、且つ複数の孔が形成され、被処理ウェハWを保持した第1の保持部110の外周部に対して不活性ガスを水平に供給するポーラスリング130と、を有している。第1の保持部110において被処理ウェハWを保持するポーラス121の保持面121aの径は、被処理ウェハWの径よりも小さい。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
インナーパレット
【課題】 本発明は、高い密度で集積された薄板基板を、湾曲させた状態で損傷したり汚したりすることなく、安全に搬送および保管することができるパレットの提供を目的とする。
【解決手段】 本発明は、薄板基板1を湾曲させて収納する基板保持用枠体10を、多段に積層し載置するための湾曲形状保持部30と、移動搬送装置のための移動搬送装置対応部40を上下に固着した2層構造からなり、湾曲した湾曲形状保持部30の上面に固着した嵌合用枠体20の嵌合用金属枠部21の上面から内周下方向に傾斜して突出しているパレット側嵌合部22と、載置される基板保持用枠体10の金属枠部11の下面から内周下方向に傾斜して突出している第1嵌合部12との嵌め合わせにより、上記の課題を解決した。
(もっと読む)
プラズマ処理装置及びプラズマ処理方法
【課題】プラズマ処理装置の小型化ないし設置面積の低減を図る。
【解決手段】ドライエッチング装置1は基板2を収容した搬送可能なトレイ3を収納したカセット62を含むストック部13を備える。トレイ3の搬送機構15を収容した搬送部12内に、回転ステージ33が設けられている。ドライエッチング前のトレイ3を載置した回転ステージ33を回転させ、ノッチ検出センサー44によりノッチ3cを検出することでトレイ3の回転角度位置調整を行う。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
磁性シートの移載システム、キャリア及び磁性シートの移載方法
【課題】磁性シートを円滑に移載することができる磁性シートの移載システム、キャリア及び磁性シートの移載方法を提供する。
【解決手段】本発明の一実施形態に係るキャリア10は、第1の非磁性基板11と、第2の非磁性基板12と、磁石13とを有する。第1の非磁性基板11は、磁性シートMを支持する第1の面11aとこれとは反対側の第2の面11bとを有する。第2の非磁性基板12は、第2の面11bに対向し、磁石13は、第2の非磁性基板12に固定され、第1の面11aに磁場を形成する。第1の非磁性基板12は、第2の非磁性基板12と近接した第1の支持位置と第2の非磁性基板12から離間した第2の支持位置との間を移動可能に構成され、第2の支持位置で第2の非磁性基板12からウェーハカセットへ磁性シートとともに移載される。
(もっと読む)
161 - 180 / 3,249
[ Back to top ]