
Fターム[5F031GA08]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フォーク (2,669) | フォーク上でのウエハ等の固定機構 (801) | 真空吸着 (482)
Fターム[5F031GA08]に分類される特許
41 - 60 / 482
物体保持装置の清掃システム、物体保持装置の清掃装置、及び物体保持装置の清掃方法
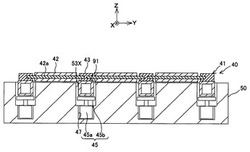
【課題】基板保持部材の上面(基板載置面)を効率良く清掃する。
【解決手段】清掃ユニット40は、基板搬入装置により粘着ローラ42の外周面が基板載置面に当接する位置に搬送される。そして、基板搬出装置により清掃ユニット40が基板ホルダ50に対しX軸方向に相対移動されることにより、基板載置面上の塵が粘着ローラ42に付着して除去される。そして、清掃ユニット40は、基板搬出装置により粘着ローラ42の外周面が基板載置面から離間する位置に搬送される。したがって、基板載置面の清掃に人員を要さず、その清掃効率に優れる。
(もっと読む)
基板搬送アーム及び基板搬送装置

【課題】自重で撓んだ状態の基板を破損させずに基板収容容器から取り出すことができる基板搬送アームを提供する。
【解決手段】基板搬送アーム1は、基板収容容器内に水平に置かれた基板の下側に挿入されて、この基板の裏面を支持しつつ基板を前記収容容器から搬出する。基板搬送アーム1は、基板が搬出されるときに基板の裏面を支持する載置面12sを有する載置部と、当該基板搬送アーム1が基板の下側に挿入されるときに、基板の裏面を少なくとも載置面12sの高さにまで押し上げる押上部12rとを備える。
(もっと読む)
接合システム、基板処理システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の接合を効率よく行い、接合処理のスループットを向上させる。
【解決手段】接合システム1は、接合処理ステーション3に対して、被処理ウェハW、支持ウェハS又は重合ウェハTを搬入出する搬入出ステーション2と、被処理ウェハWと支持ウェハSに所定の処理を行う接合処理ステーション3とを有している。接合処理ステーション3は、被処理ウェハWに接着剤を塗布する塗布装置40と、被処理ウェハWを第1の温度に加熱する第1の熱処理装置41〜43と、被処理ウェハWを第2の温度にさらに加熱する第2の熱処理装置44〜46と、支持ウェハSの表裏面を反転させる反転装置34〜37と、被処理ウェハWと支持ウェハSを接合する接合装置30〜33と、各装置に対して被処理ウェハW、支持ウェハS又は重合ウェハTを搬送するためのウェハ搬送領域60とを有する。
(もっと読む)
ウエハ処理装置、ウエハ処理方法及び半導体装置の製造方法
【課題】ウエハホルダ上の処理済みウエハの入れ替えに失敗した場合でも不良品の発生を防止できるウエハ処理装置を提供する。
【解決手段】ウエハ処理装置1は、ペディスタルP1〜P13を有するウエハホルダ31と、これらペディスタルP1〜P13に載置されたウエハに処理が施された後、ウエハホルダ31を回転させてペディスタルP1〜P13を所定の取付位置に順次位置付けし、当該位置付けされたペディスタルからウエハを取り外し、その後、当該ペディスタルに未処理のウエハを載置させるウエハ搬送機構30と、ウエハ搬送制御部62と、検出センサ38とを備える。ウエハホルダ31は、被検出部31sを有し、検出センサ38は、ペディスタルP1〜P13のいずれかが前記取外位置に位置付けされたときに被検出部31sの位置が基準位置と一致するか否かを示す判定信号を出力する。
(もっと読む)
基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体
【課題】基板の周縁部に切欠きがある基板をフォークにより保持し、搬送するときに、基板位置のずれ量を精度よく検出でき、そのずれ量を容易に補正できるとともに、フォークの状態を同時に確認して補正できる基板搬送装置を提供する。
【解決手段】
基台と、基台から進退自在に設けられ、基板Wを保持する保持部3Aと、保持部3Aが基板Wを保持した状態で後退しているときに、保持部3Aが保持している基板Wの周縁部の位置を、それぞれ異なる位置で検出する4個以上の検出部5と、検出部5が周縁部の位置を検出した検出値に基づいて、検出部5のいずれかが基板Wの周縁部の切欠きが設けられた部分WNを検出したか否かを判定し、一の検出部5が切欠きが設けられた部分WNを検出したと判定したときに、一の検出部5以外の3個の検出部5の検出値に基づいて、次の処理ユニットに搬送するときに処理ユニットの基板Wの受渡し位置に補正する、制御部とを有する。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
シート貼付装置及び貼付方法
【課題】構造の簡略化を図りつつ、接着シートの凹部を半導体ウエハ等の被着体に位置合わせした状態で、それらを貼付できるようにすること。
【解決手段】シート貼付装置10は、半導体ウエハWを支持可能な支持面21を有する支持手段11と、接着シートSを支持面21に臨むように繰り出す繰出手段12と、接着シートSに形成された凹部Cの位置を検出する凹部検出手段13と、支持面21に半導体ウエハWを載置するための多関節ロボット15及び搬送アーム82と、支持手段11に支持された半導体ウエハWに接着シートSを押圧して貼付する押圧手段18と備えて構成されている。多関節ロボット15は、凹部検出手段13の検出結果に基づいて作動することにより、凹部中心位置DCと半導体ウエハ中心位置WCとが一致するよう半導体ウエハWを支持面21上に載置する。
(もっと読む)
シート貼付ローラ及びこれを用いたシート貼付装置並びにシート貼付方法
【課題】凹部を有する接着シートを貼付するときに、被着体の損傷を防止でき、貼付される接着シートが変形することを抑制できるようにすること。
【解決手段】シート貼付ローラ86は、軸状をなすローラ本体90と、このローラ本体90の外周側に突出して配置される第1弾性部材91とを備えている。第1弾性部材91は、接着シートSの基材シートBS側における凹部C底面以外に対応する領域に当接し、接着シートSを半導体ウエハWに押圧可能に設けられている。第1弾性部材91は、接着シートS貼付時に、当該接着シートSを半導体ウエハWに押圧する部分がローラ本体90の表面と同一高さに変形可能に設けられている。
(もっと読む)
平行度確認治具
【課題】吸引保持パッドの吸着面とチャックテーブルの保持面との平行度が許容範囲であるか否かを容易に確認することができる平行度確認治具を提供する。
【解決手段】被加工物を保持する保持面を有するチャックテーブルと、チャックテーブルに保持された被加工物を加工する加工手段と、下面に被加工物を吸引保持する吸着面を有する吸引保持パッドを備えチャックテーブルに被加工物を搬入または搬出する搬送手段とを具備する加工装置における、吸引保持パッドの吸着面とチャックテーブルの保持面との平行度を確認する平行度確認治具あって、第1の厚みを有する第1の厚み確認部と第2の厚みを有する第2の厚み確認部とを具備し、第1の厚み確認部の第1の厚みは該吸引保持パッドを基準待機位置に位置付けた状態においてチャックテーブルの保持面と吸引保持パッドの吸着面との基準間隔に設定されており、第2の厚み確認部の第2の厚みは第1の厚みより僅かに厚い許容できる平行度の上限値に設定されている。
(もっと読む)
吸着装置
【課題】絶縁性の基板に対するグラディエント力と真空吸着力の両方を大きくできる吸着装置、その製造方法、真空処理装置を提供する。
【解決手段】基体21上に絶縁性の下地膜22を形成し、下地膜22上に第一、第二の電極23a、23bを形成する。第一、第二の電極23a、23b間の下地膜22を表面側から途中まで除去し、吸着溝26を形成する。第一、第二の電極23a、23bや、その表面の保護膜24の膜厚が薄くても、吸着溝26の深さを深くすることができる。
(もっと読む)
加工方法
【課題】如何なる外形の被加工物でも保持テーブルに直接吸引保持して加工を施すことができる加工方法を提供する。
【解決手段】保持テーブル70の保持面73に貼着した粘着シート5上に被加工物1を載置し、この被加工物1の外形縁に沿って粘着シート5を切断して、粘着シート5を、保持面73の被加工物対応領域73Aに対応する部分5Aと、外側領域73Bに対応する部分5Bとに分離する。次いで、粘着シート5の被加工物対応領域73Aに対応する部分5Aを除去し、被加工物対応領域73Aに被加工物1を対応させて直接載置する。次いで被加工物1を保持面73に吸引保持して加工を施す。
(もっと読む)
真空ピンセット及び真空吸着方法
【課題】反りがある半導体ウエハに対して、安定して吸着することができ、かつ、半導体ウエハを平らに矯正することができる真空ピンセット。
【解決手段】本体2と、本体2の端部に設けられた支持部3と、一端が支持部3に接続され、他端に吸着部5を備えた複数の先端部材4と、を少なくとも備え、先端部材4と支持部3と本体部2の内部に吸引流路10a〜10cが設けられた、反りを有する平板状の被処理体用Wの真空ピンセット1Aであって、複数の先端部材4は、反りの形状に合わせるように、及び、反りを矯正するように、支持部3に対して可動であることを特徴とする真空ピンセット1A。
(もっと読む)
ワーク搬送装置及びワーク搬送方法
【課題】薄板状のワークの保持を非接触状態から接触状態又は接触状態から非接触状態に切替える際にワークの傾斜を防止できるワーク搬送装置及びワーク搬送方法を提供する。
【解決手段】ワーク搬送装置10は、薄板状のワーク11に向けて下降接近し、ワーク11を吸引し非接触状態で保持して移動する非接触式搬送機構15と、非接触式搬送機構15から受け取ったワーク11を真空吸引により吸着保持して移動する吸着テーブル16を備えた接触式搬送機構21と、非接触式搬送機構15から接触式搬送機構21にワーク11を受け渡す際に、吸着テーブル16の真空吸引開始及び非接触式搬送機構15の吸引停止のタイミングを制御する制御手段27とを有し、制御手段27は、非接触式搬送機構15を下降させた後に真空吸引を開始させ、ワーク11の下面と吸着テーブル16の上面との距離が受渡し距離に到達した時点で非接触式搬送機構15の吸引を停止する。
(もっと読む)
板状物の搬出入装置
【課題】 薄化されて反ったウエーハでも吸引保持が可能な搬出入装置を提供することである。
【解決手段】 板状物を吸引保持する保持面を有する保持部と、該保持部をカセット内に挿入する屈曲アーム機構とを備え、該カセット内に収容された板状物を該カセット内から搬出又は該カセット内へ板状物を搬入する板状物の搬出入装置であって、該保持部は、該保持面に開口する吸引口と、吸引源に接続されて該吸引口に負圧を伝達する負圧伝達路と、該吸引口を囲繞するように配設された弾性部材からなる吸着パッドと、を具備したことを特徴とする。
(もっと読む)
ウエハ並べ替え装置
【課題】作業性を向上させることができるとともに、短時間でウエハの並べ替えを行い、処理効率の向上を図ることができるウエハ並べ替え装置を提供する。
【解決手段】複数のウエハ2が収容されるカセット1を載置可能な複数のカセットステージ10と、ウエハ2の識別情報を認識する識別手段3を有する識別ステージ30とを平面視円弧状に並べて一列に設置するとともに、各ステージの半径方向外方及び上方を開放状態とし、その半径方向内方位置に、旋回アーム40の先端に1ウエハを一枚ずつ支持して各ステージ間を移送する移送手段4を設けた。
(もっと読む)
フレームクランプ装置
【課題】 環状フレームをクランプしない状態で被加工物の切削を開始したり、又は押さえ部材の上面に環状フレームが載置された状態で被加工物の切削を開始して、クランプ装置や切削ブレードを破損させてしまうことのないクランプ装置を提供することである。
【解決手段】 チャックテーブルの外周に配設されて、粘着シート上に貼着された被加工物を支持する環状フレームを固定するフレームクランプ装置であって、該環状フレームを支持する支持部材と、回転軸を有し、該支持部材に固定されたエアアクチュエータと、該エアアクチュエータの該回転軸に固定され、該エアアクチュエータを駆動することによりクランプ位置と解放位置との間で回動される押さえ部材と、該押さえ部材が該クランプ位置又は該解放位置に位置づけられたことを検出する検出手段と、を具備したことを特徴とする。
(もっと読む)
基板搬送機構および偏光フィルムの貼合装置における搬送手段を備えた基板支持装置
【課題】 第1基板搬送機構61から基板支持装置66内の搬送通路662の基板支持位置へ基板5を滑らかに搬送すること。
【解決手段】 第1フィルム搬送機構51における基板の搬送方向に沿って搬送を行うように配設された複数の搬送ロール663と、該搬送通路662から搬送される上記基板に接触して上記第2フィルム搬送機構52における基板の搬送方向に沿って搬送を行うように配設された複数の搬送ロール664と、該複数の搬送ロール664を上下に移動させることにより、上記搬送通路662の基板支持位置に到達した上記基板を挟着して支持するとともに、基板反転部67によって反転された上記基板の挟着状態を解除する基板支持駆動機構665を備えている基板支持装置。
(もっと読む)
基板搬送機構、偏光フィルムの貼合装置およびこれを備える液晶表示装置の製造システム
【課題】 基板を確実に支持するとともに、基板を反転させて第2基板搬送機構の搬送方向に沿うように配置変更して、タクトタイムを短くすること。
【解決手段】 基板支持装置の駆動制御手段が基板支持部材66に作用して、上記基板支持部材を基板支持状態にして、第1基板搬送機構61にて搬送され基板5が支持され、基板5の搬送方向に対して傾斜して配設された反転軸回りに基板反転部67が反転して、反転された基板5を第2基板搬送機構62の搬送方向に沿うように配置する基板搬送機構、偏光フィルムの貼合装置およびこれを備える液晶表示装置の製造システム。
(もっと読む)
基板搬送機構および偏光フィルムの貼合装置における基板支持装置
【課題】シンプルな構成によって、基板を確実に挟着支持して、反転後の挟着支持の解除を可能にすること。
【解決手段】 本発明の基板支持装置は、上記基板の反転動作を行う上記基板反転部67に連結した部材に配設され、第1基板搬送機構61および第2基板搬送機構62の端部に進入する第1の支持部材661と第2の支持部材662との相対的移動によって、上記第1の支持部材661と第2の支持部材662との間に上記第1基板搬送機構から搬送された上記基板5が、挟着されることによって支持されるとともに、上記基板反転部67によって反転された上記第1の支持部材661と第2の支持部材662との間に挟着支持された上記基板5が、解除され、上記第2基板搬送機構62の端部に載置されるように構成されている。
(もっと読む)
真空吸引装置
【課題】移送する基板の寸法及び形状に応じて、吸引範囲を自動的に調整することのできる真空吸引装置を提供する。
【解決手段】吸引フラッドベッド110は、基板に接触する接触面110a、及びこの接触面上に配置された少なくとも1つの吸引孔110bを具えている。基部120は、吸引フラットベッドに接続され、吸引孔に連通する真空室Vが、フラッドベッド及び基部によって規定される。可動トリガー130は吸引孔内に組み立てられ、可動トリガーは、接触面を超えて突出した接触部132、及び吸引孔と真空室との間の連通を塞ぐ閉塞部134を具え、基板Pが接触面に接触すると、基板が可動トリガーを押して、吸引孔内の可動トリガーの状態を、閉塞部が吸引孔と真空室との間の連通を塞ぐことができないように変化させる。空気抜き140は真空室に連通する。
(もっと読む)
41 - 60 / 482
[ Back to top ]