
Fターム[5F031GA14]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 把持・挟持によるもの (669) | 爪,指の開閉機構 (122)
Fターム[5F031GA14]に分類される特許
1 - 20 / 122
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
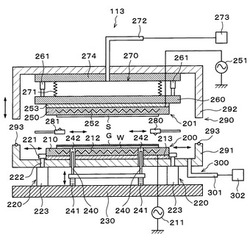
【課題】被処理基板と支持基板を適切に接合する。
【解決手段】接合装置の接合部113は、被処理ウェハWを保持する第1の保持部200と、第1の保持部200に対向配置され、支持ウェハSを保持する第2の保持部201と、第2の保持部201に保持された支持ウェハSを覆うように設けられた鉛直方向に伸縮自在の圧力容器271を備え、当該圧力容器271内に気体を流入出させることで第2の保持部201を第1の保持部200側に押圧する加圧機構270と、第1の保持部200、第2の保持部201及び圧力容器271を内部に収容し、内部を密閉可能な処理容器290と、処理容器290内の雰囲気を減圧する減圧機構300と、を有している。
(もっと読む)
搬送装置

【課題】円板状板状物の中心がずれた状態の円板状板状物ユニットでも、搬送先のチャックテーブルに中心を位置合わせして搬送可能な搬送装置を提供する。
【解決手段】環状フレームFに円板状板状物の貼着された円板状板状物ユニットを搬送先のチャックテーブルへ搬送する装置2は、前記円板状板状物ユニットの吸引保持と該チャックテーブルの中心位置合わせを行なう吸引保持位置合わせ機構と、該吸引保持位置合わせ機構の移動機構とを具備し、前記吸引保持位置合わせ機構は、環状フレームFを吸引保持する吸引保持部46と、前記円板状板状物ユニットの前記円板状板状物の外周側面に作用する複数の爪30を待機位置と互いに半径方向に接近した作用位置との間で移動させることで、前記チャックテーブルの中心に位置付けする手段と、吸引保持部46を吸引保持位置とその上方の退避位置とに位置付ける吸引保持部位置付け手段18とを含む。
(もっと読む)
基板搬送用ハンドおよび基板搬送ロボット
【課題】製造コストの削減および軽量化を図るとともに複数枚の基板を同時に搬送することができること。
【解決手段】基板搬送用ハンドは、第1の載置部と、第2の載置部とを備える。第1の載置部は、所定の高さの載置面にて基板を支える複数の支持部を含み、第2の載置部は、第1の載置部の載置面の高さよりも上方の載置面にて基板を支える複数の支持部を含み、該支持部のうち1または複数は退避可能である。第1の載置部に基板を載置し、さらに、第2の載置部に別の基板を載置するよう基板搬送用ハンドを構成する。
(もっと読む)
基板搬送装置、基板処理システムおよび基板搬送方法、ならびに記憶媒体
【課題】真空において熱をともなう処理を行う基板処理装置において、基板を高速で搬送しても基板の位置精度を高くすることができること。
【解決手段】熱をともなう真空処理が行われる真空処理ユニットに対して基板の搬入および搬出を行う基板搬送装置は、基板を位置決めする位置決めピンを有し、基板を位置決めした状態で保持するピックと、ピックにより真空処理ユニットに対して基板を搬入および搬出するようにピックを駆動させる駆動部と、ピックによる基板の搬送動作を制御する搬送制御部とを有し、搬送制御部は、基板を真空処理ユニットに搬入する際の、常温における基板の基準位置情報を予め把握しておき、実処理において、基板を真空処理ユニットに搬入する際に、その基板の基準位置からの位置ずれを算出し、位置ずれを補正して基板を真空処理ユニットに搬入するように駆動部を制御する。
(もっと読む)
基板搬送方法および基板搬送機
【課題】基板搬送機自体の位置決め調整の許容範囲を広げ、基板へのダメージ、パーティクルの発生、基板の搬送不良を防止することができる基板搬送方法および基板搬送機を提供する。
【解決手段】本基板搬送方法は、基板Wの周縁部を一対の支持アーム171で支持し、支持アーム171と基板Wの周端部との間に所定のクリアランスが形成された状態で、支持アーム171および基板Wを移動機構162,165により移動させる。支持アーム171で支持している基板Wを反転させることも可能である。
(もっと読む)
物体の搬出方法、物体の交換方法、物体保持装置、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法
【課題】基板ステージ上の基板の搬出を迅速に行う。
【解決手段】 基板ホルダ30aには、基板Pの搬送に用いられる基板トレイ40aを収容するX溝31xが形成されている。また、X溝31x内には、基板トレイ40aを押圧して基板トレイ40aと共に基板Pを移動させる基板搬出装置70aが設けられている。このため、基板Pに対する露光処理が終了した後、基板Pの交換のために基板ステージ20aを基板交換位置に位置させる前に基板Pの搬出動作を開始することができる。
(もっと読む)
把持用ハンド
【課題】 表面に粘着材料を有する被搬送部材の粘着部分を把持しても確実に把持を解放できる、把持ハンドを提供する。
【解決手段】 表面に粘着材料を有する被搬送部材を把持するための、把持用ハンドにおいて、
先端部把持用ハンドの本体部には、
先端部被搬送部材の周辺部の上面及び下面を把持するための上爪部及び下爪部と、
先端部上爪部及び先端部下爪部の開閉動作をさせる開閉把持機構と、
先端部被搬送部材の上面又は上端部に当接可能なストッパー部とが備えられており、
先端部ストッパー部は、
先端部開閉把持機構が閉状態にあるときに、先端部ストッパー部側の先端部当接部が
先端部被搬送部材側の先端部当接部よりも上方に配置されていることを特徴とする、把持用ハンド。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する環状凸部とを裏面に備えるウエーハであって、該円形凹部の直径が該環状凸部の上面から該円形凹部の底面に向かって大きくなる様に該環状凸部の内周壁が傾斜していることを特徴とする。搬送方法は、複数の支持指を円形凹部内に挿入し、支持指で環状凸部の内周壁上方を支持した状態でウエーハを搬送する。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する所定の幅を有する環状凸部とが裏面に形成されたウエーハであって、該環状凸部の内周壁に局所的に複数のへこみ部を有することを特徴とする。搬送方法は、複数の支持指を環状凸部の内周壁に形成された凹み部に挿入し、支持指で環状凸部の内周壁を支持した状態でウエーハを搬送する。
(もっと読む)
基板処理装置
【課題】複数の処理槽のそれぞれに複数の基板を良好に一括搬送することができる基板処理装置を提供する。
【解決手段】基板処理装置1は、搬送ロボット10と、処理部40とを有している。処理部40は、複数の処理槽41、42を有しており、処理槽41には処理液として洗浄液が、処理槽42には処理液として薬液が貯留される。搬送ロボット10は、単一の搬送ユニットとして構成されている。搬送ロボット10は、本体部12と、本体部12から離隔して配置された各処理槽41、42に向かって伸びるアーム部13とを有している。ここで、各処理槽41、42は、搬送ロボット10の可動範囲内となるように、複数の基板の搬送空間8に配置されている。これにより、搬送ロボット10は、複数の基板を、各処理槽41、42の配置によらず、任意の順番で、各処理槽41、42に対応して貯留された処理液に、浸漬することができる。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】搬送する基板の大きさに応じて基板保持機構の大きさを調整し得る基板搬送装置を提供する。
【解決手段】本発明による基板搬送装置100は、処理台A上の基板Bを搬送する基板搬送装置であって、処理台Aから基板Bを持上げる第1基板持上げ機構110と、基板Bの大きさに合わせて開閉し、持上げた基板Bを保持する基板保持機構120とを備える。さらに処理台Aは、第1固定台A1と第2固定台A2とを含み、基板保持機構120は、第1固定台A1と第2固定台A2との間を移動し、第1基板持上げ機構110と基板保持機構120との協働により、基板Bを第1固定台A1から第2固定台A2に搬送する。
(もっと読む)
基板を格納するための基板容器
【課題】半導体ウェハ又は基板を支持するための新規な装置を提供する。
【解決手段】基板容器は、基板を包囲するハウジングを備え、ハウジングはハウジングの包囲体の中にアクセスするための容器ドアを有する。ハウジングの中に配置された支持構造体は前記包囲体の中に延びる複数のタインを有する。タインは外縁を有する。複数のタインは水平方向に配置される。基板の張り出し部分はタインの外縁を越えて延び、基板に係合するアクセス領域を形成する。タインは基板を支持するための支持パッドを含む。タインのうちの1つの支持パッドのうちの1つは前記アクセス領域のうちの一方の側に配置され、タインのうちの1つの支持パッドのうちの他の1つは前記アクセス領域のうちの他方の側に配置される。
(もっと読む)
基板搬送装置
【課題】可動の支持部により基板を支持しながら、基板を支持する構成の軽量化を図ること。
【解決手段】基板を支持する支持手段と、前記支持手段を所定の基板受け渡し地点に移動させる移動手段と、を備えた基板搬送装置であって、前記支持手段は、前記基板を支持する支持位置と基板の支持を解除する支持解除位置との間で移動可能な可動支持部を少なくとも含み、前記基板を支持する複数の支持部と、前記可動支持部を、前記支持位置に位置させる方向に付勢する付勢手段と、を含み、前記基板搬送装置は、更に、前記基板受け渡し地点に配置され、前記付勢手段の付勢力に抗して前記可動支持部を前記支持位置から前記支持解除位置に移動する支持部移動手段を備えたことを特徴とする。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】処理済ウエハを搬送するときにも未処理ウエハより速度を上げて搬送可能とし,これによって従来以上に処理全体のスループットを向上させる。
【解決手段】ローダアーム機構200のピックを基板保持可能範囲を拡大して位置ずれが発生してもウエハを保持できるようにし,トランスファアーム機構300を搬送制御する際,そのピック上に未処理ウエハWがあるか否かを判断し,未処理ウエハなしと判断した場合は,ピック上にウエハなしの場合のみならず,処理済ウエハありの場合についても,ピック上に未処理ウエハありと判断した場合よりも速い速度で搬送制御する。
(もっと読む)
固定機構、ワークの固定方法、およびワークの固定解除方法
【課題】平板状のワークを起立姿勢で良好に固定する固定機構、並びにこの固定機構によるワークの固定方法およびワークの固定解除方法を提供する。
【解決手段】押さえ枠72は、環状とされており、ワーク3の外縁部を押さえる。複数の付勢部材73は、バネ等の弾性部材により形成されており、押さえ枠72の4隅のうちの対応するコーナーと連結されている。複数の可動クランプ部61(61a〜61c)のそれぞれは、押さえ枠72に対して近接または離隔する方向に進退する。固定クランプ部62は、押さえ枠72付近に固定されている。また、複数の可動クランプ部61および固定クランプ部62のそれぞれは、押さえ枠72に沿って設けられている。これにより、ワーク3の外縁部は、複数の可動クランプ部61および固定クランプ部62と、押さえ枠72と、によって良好に挟み込まれる。
(もっと読む)
搬送車のグリッパ装置、及び搬送車
【課題】搬送車のグリッパ装置において、被搬送物の落下を防止するための修理やメンテナンスの必要を少なくする。
【解決手段】搬送車のグリッパ装置は、ベースプレート(110)と、このベースプレートの上面に設けられたガイドレール(120)と、このガイドレールに沿って互いに接近及び離間するように略水平方向に移動可能に係合された一対のガイドブロック(130)と、このガイドブロックの上面に固定され、ベースプレートの上面に沿って延在する水平部分(141)と、この水平部分からベースプレートより下方まで延在する垂直部分(142)と、この垂直部分の下端側に設けられ被搬送物を把持するための爪部(143)とを夫々有する一対の把持部(140)とを備える。
(もっと読む)
天井搬送車
【課題】天井搬送車において、簡易な構成で、被搬送物の搬送中に一対のチャック部が開くのを防止する。
【解決手段】天井搬送車は、天井に敷設された軌道に沿って走行し、被搬送物を把持する把持部(101)を昇降部(12)が巻き上げ及び巻き下げして被搬送物を搬送する天井搬送車であって、把持部は、ベースプレート(110)と、このベースプレートに設けられたガイドレール(120)と、このガイドレールに沿って互いに接近及び離間するように略水平方向に移動可能とされ、被搬送物を把持するための爪部(143)を有する一対のチャック部(140)と、このチャック部に設けられ、弾性体を含んでなるクッション部材(160)とを備え、昇降部が把持部を巻き上げた際には、クッション部材が昇降部に当接して押圧され、昇降部との間で発生する摩擦力によってチャック部の移動が規制される。
(もっと読む)
同軸複数軸出力機構
【課題】 偏心揺動型減速機を用い、構造の簡単な同軸複数軸(2軸以上)の出力を取り出せるようにした同軸複数軸出力機構を提供する。
【解決手段】 偏心体軸(71)と、偏心体軸に設けられた偏心体(72)と、偏心体が貫通し、偏心体の回転により揺動回転される内歯揺動体(75)と、内歯揺動体と噛合する外歯歯車(15、25)とからなる複数組の偏心揺動型減速機(70)および前記偏心揺動型減速機の組数と同数の同軸状に配置された出力軸(12、22)からなり、前記複数組の偏心揺動型減速機の外歯歯車が軸線方向に間隔を開けて対応する各出力軸に取着されており、前記複数組の偏心揺動型減速機の偏心体軸を回転自在に支持する支持体(31)を固定して、偏心体軸から回転を入力し、外歯歯車から複数の出力軸へ同軸出力可能とした。
(もっと読む)
基板搬送ロボット
【課題】基板が損傷しない基板搬送ロボットを提供する。
【解決手段】第一、第二の従動アーム22a,22bによって回転され、互いに歯合した第一、第二の規制ギア25a,25bに対し、それぞれ歯合する第一、第二のピニオンギア32a,32bを設け、第一、第二のピニオンギア32a,32bでピニオンギア用ラック41を挟む。ハンド23が放射方向外側から内側に向けて移動し、ハンド23が搬送室内に位置する状態では、ピニオンギア用ラック41は放射方向外側に移動し、緩衝部材を介して基板15を押圧し、基板15をクランプする。ハンド23が放射方向外側に移動し、処理室内に位置するときは、ピニオンギア用ラック41は放射方向内側に移動し、クランプは解除される。搬送室内でクランプされているので高速移動が可能である。
(もっと読む)
ウェハ移送用高速交換ステーション
【課題】少なくとも1つのディスク様の部材を受入れまたは移送するための装置を提供すること。
【解決手段】装置は、把持手段を備える取上げおよび配置機構を備える。実際に、機構は、取上げおよび/または配置サイクルを提供するように構成されており、動作中、上側位置と下側位置の間、およびその逆の前記把持手段の運動を提供し、下側位置では、前記把持手段が、ディスク様の部材をロード位置から取り上げるか、ディスク様の部材をロード位置に配置するのいずれかを行う。
(もっと読む)
1 - 20 / 122
[ Back to top ]